

2.3.1. Выбор резисторов для схемы усо.
Все резисторы серии МЛТ - постоянные металлопленочные лакированные теплостойкие, группа по уровню шумов А, документация на поставку Д.
Выбор по мощности резисторов:
Резисторы R1-R8 для проектной схемы и R23-R27 для отладочной схемы выбираем из условия, когда по светодиоду оптопары протекает максимально допустимый ток, равный 20 мА.
Напряжение U = 5В,
I=0.020 А
R= 0,25 кОм
Р = I2R = 0,1 Вт
Выбираем резисторы серии МЛТ - 0,25 - 280 +/- 5 %
Резисторы R9-R16 для проектной схемы и R28-R32 для отладочной схемы, необходимы для защиты от плохого контакта, т.е. для протекания по кнопке большого тока. Поэтому возьмем резисторы сопротивлением 100 Ом.
Резисторы R17 - R24 для проектной схемы и R1-R6 для отладочной схемы выбираются из условия создания в светодиодах номинальных рабочих токов. R = U/0.01 = 5В/0.01А = 500Ом,
Р = I2R = 50 мВТ
Выбираем резисторы серии МЛТ - 0,5 - 510 +/- 5 %
Резисторы R25 – R40 для проектной схемы и R7-R12 для отладочной схемы
U=5B, R=330 Ом
I=0,015 А
Р = I2R = 0,075 Вт = 75 мВТ
Выбираем резисторы серии МЛТ - 0,25 – 330 +/- 5 %
На резисторы R41 - R56 для проектной схемы и R13-R16 для отладочной схемы
Напряжение U = 5В,
R = 600 Ом
I = 0.008 А
Р= I2R = 0,0384 Вт = 38,4 мВТ
Выбираем резисторы на 0.25 ВТ серии МЛТ - 0,25 – 600 +/- 5 %
Резисторы R57 – R72 для проектной схемы и R17-R22 для отладочной схемы выбираем из технического описания оптопары, а следовательно 100 кОм.
3. Моделирование системы управления движением.
Цель рассмотрения вопроса, определение условий управлений без пропуска импульсов.
Математическая модель шагового привода в программе математического моделирования «Matlab» и имеет вид, см. рис. 3.1.

Рис. 3.1. Модель шагового линейного привода.
Прежде чем приступить к моделированию, уточним параметры привода:
Число тактов управления 128
Максимальное тяговое усилие F=40 Н
Масса механизма m=2 кг
Число зубцов Zp=64
Коэффициент демпфирования 1,5
Согласно приведенным параметрам были получены результаты, см рис.3.2-3.9
Рис. 3.2. Переходный процесс φ=f(t) и γ=f(t) при fзад=5
Н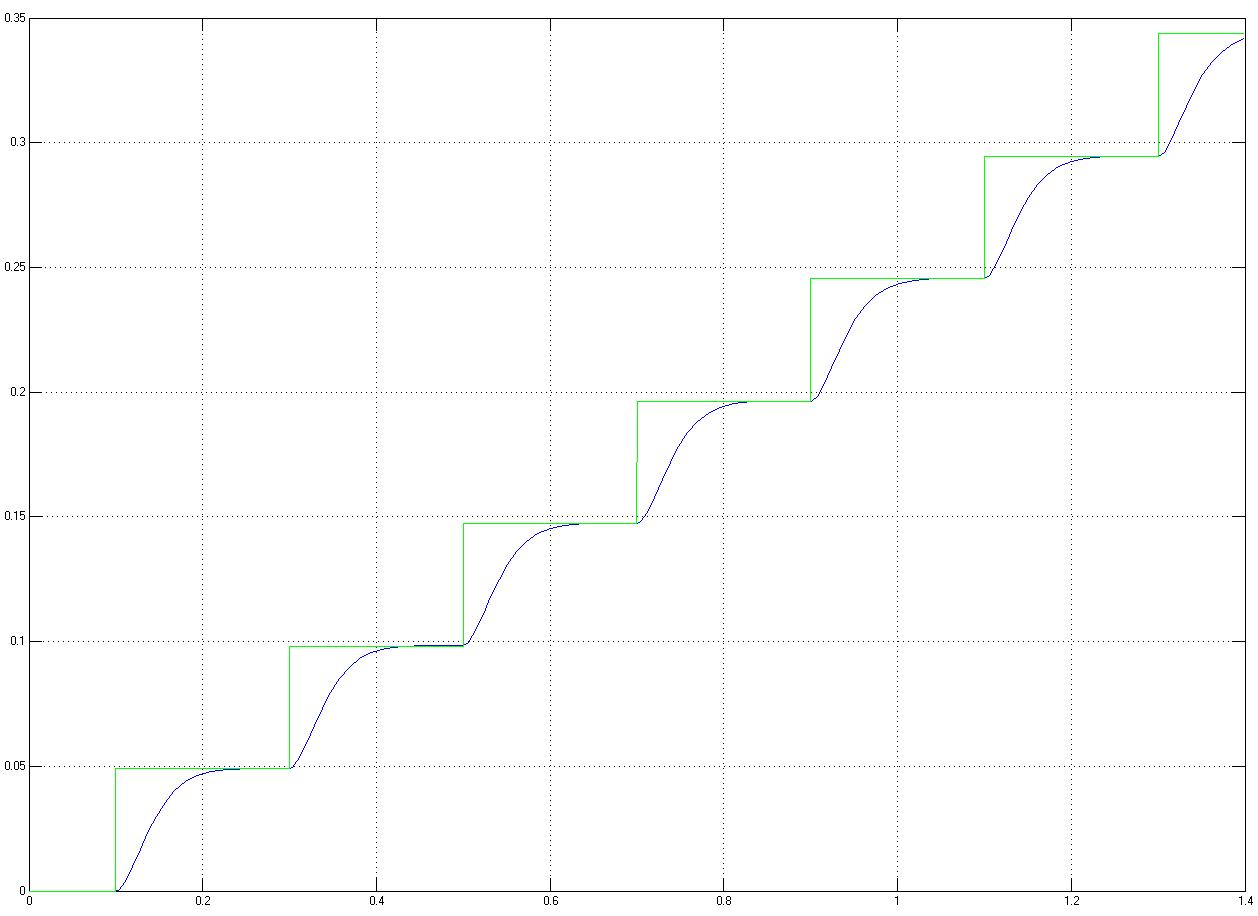 а
рис. 3.2 мы видим что процесс монотонный
(fзад=5),
без перерегулирования, индуктор точно
отрабатывает каждый шаг. Время переходного
процесса составляет 0.12 с. Угол
рассогласования θ не превышает
допустимого, 0,05 рад. Потери информации
не происходит.
а
рис. 3.2 мы видим что процесс монотонный
(fзад=5),
без перерегулирования, индуктор точно
отрабатывает каждый шаг. Время переходного
процесса составляет 0.12 с. Угол
рассогласования θ не превышает
допустимого, 0,05 рад. Потери информации
не происходит.
При малой частоте управляющих импульсов двигатель работает в шаговом режиме, свободно отрабатывая каждый шаг. При этом колебания статора полностью затухают.

Рис. 3.3. Переходный процесс θ =f(t) при fзад=5

Рис. 3.4. Переходный процесс φ=f(t) и γ=f(t) при fзад=471

Рис. 3.5. Переходный процесс θ =f(t) при fзад=471
На рис. 3.5 мы видим что работа привода осуществляется на частоте приемистости, равной fприем.=471 шаг/с. Из рисунка видно, что угол рассогласования θ почти достиг 1.5 рад. На рис. 3.4 хорошо видно, что привод не успевает отрабатывать импульсы, но и потери информации не происходит.

Рис. 3.6. Переходный процесс φ=f(t) и γ=f(t) при fзад=480
На рис. 3.6 мы видим работу привода на частоте выше частоты приемистости, равной f=480 шаг/с, при этом происходят провалы, т.е. пропуски шагов и потеря информации. Из рис. 3.7 видно что угол рассогласования θ превысил предельно допустимый равный 3.14, двигатель начинает выпадать из синхронизма.

Рис. 3.7. Переходный процесс θ =f(t) при fзад=480

Рис. 3.8. Переходный процесс φ=f(t) и γ=f(t) при fзад=447 и ном. нагрузке.

Рис. 3.9. Переходный процесс θ =f(t) при fзад=447 и ном. нагрузке.
На рис.3.8 – 3.9 показана работа привода при нагрузке, приложенных к индуктору. На рисунках мы видим, что частота приемистости является функцией нагрузки. Так при ее отсутствии частота приемистости равна 471 шаг/с, при приложении нагрузки частота приемистости, равна 447 шаг/с, т.е. частота приемистости обратно пропорционально прилагаемой нагрузке.