

5. Информационное обеспечение систем управления при наличии случайных воздействий
5.1. Основные положения. Методы и технические средства определения характеристик случайных воздействий
В предыдущих разделах отмечалось, что достаточно объективно случайное воздействие может быть охарактеризовано корреляционной функцией или функцией спектральной плотности. Получение этих функций на основе экспериментальных исследований в производственных условиях представляет практический интерес, особенно с учетом специфики технологий и процессов пищевой промышленности.
Оценка корреляционной функции может быть осуществлена из выражения (2.26). В настоящее время для экспериментального определения корреляционных функций (в частности, дисперсий) воздействий промышленностью выпускается множество различных приборов-корреляторов. Корреляторы подразделяются на два основных класса: 1) аналоговые; 2) цифровые.
А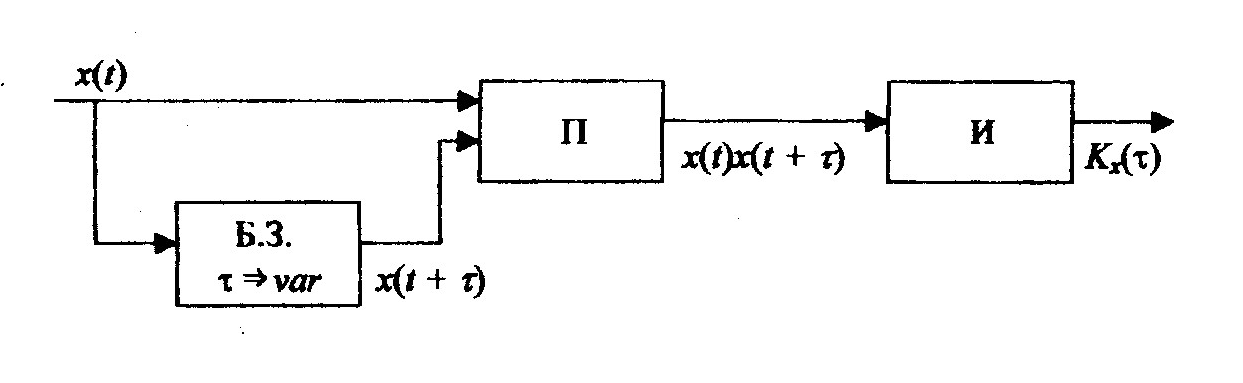 налоговые
корреляторы реализуют вычисление по
формуле (2.26) с помощью блоков временной
задержки, умножения и интегрирования,
осуществляющих соответствующие
преобразования на основе аналоговых
вычислительных схем. Эти схемы в последнее
время чаще всего
выпускаются в виде отдельных блоков –
корреляционных модулей. Использование
принципов унификации, типизации и
агрегатирования при создании таких
модулей позволяет также осуществлять
их интеграцию в системы контроля и
управления. Упрощенная блок-схема
корреляционного модуля приведена на
рис. 5.1.
налоговые
корреляторы реализуют вычисление по
формуле (2.26) с помощью блоков временной
задержки, умножения и интегрирования,
осуществляющих соответствующие
преобразования на основе аналоговых
вычислительных схем. Эти схемы в последнее
время чаще всего
выпускаются в виде отдельных блоков –
корреляционных модулей. Использование
принципов унификации, типизации и
агрегатирования при создании таких
модулей позволяет также осуществлять
их интеграцию в системы контроля и
управления. Упрощенная блок-схема
корреляционного модуля приведена на
рис. 5.1.
Рис. 5.1. Блок-схема корреляционного модуля
На схеме использованы следующие обозначения: Б.З. – блок временной задержки сигнала на величину , которая может варьироваться; П – блок умножения сигналов; И – интегратор. При такой схеме обработки информации и при выбранном времени цикла исследования Т удается получить только одну точку функции Кх() для заданной величины . Затем, повторяя заново такой цикл исследования для другой величины , получают следующую точку и т. д. Для возможности варьирования величины в состав Б.З. входит устройство записи реализаций функции x(t), что позволяет многократно осуществлять циклы исследований функции Кх() для различных значений аргумента . Так, например, если запись функции x(t) осуществляется на магнитную ленту, то величина может быть варьирована изменением расстояния между считывающими головками для получения значений функции x(t) и x(t + ), а также изменением скорости движения самой ленты.
В цифровых корреляторах осуществляется аналого-цифровое преобразование исходного сигнала x(t). Дальнейшее преобразование цифровой информации в соответствии с выражением (2.26) осуществляется программным путем с помощью специального встроенного микропроцессорного блока. Современный уровень развития микропроцессорной техники и элементной базы позволяет изготавливать корреляторы с высокими показателями надежности, малыми габаритами и с широкими возможностями адаптации к различным требованиям при проведении таких исследований как путем замены отдельных агрегатных модулей, так и перепрограммирования базового микропроцессорного блока. При этом обеспечиваются различные сервисные функции по хранению, обработке и выдаче информации потребителю. Сюда, в первую очередь, следует отнести возможности аппроксимации результатов исследований типовыми моделями корреляционных функций, наглядное отображение информации на различных устройствах и носителях и др. В настоящее время разработано значительное число методов и алгоритмов экспериментального определения корреляционных функций, которые отражены в специальной литературе [15, 16].
Как отмечалось выше, существует взаимосвязь между функцией спектральной плотности и автокорреляционной функцией, которая для стационарного случайного воздействия описывается с помощью выражений (2.20)–(2.23). Образно говоря, обе эти функции являются различными гранями одного явления случайного процесса – степени его «турбулентности». Поэтому при наличии корреляционной функции получение функции спектральной плотности может быть осуществлено аналитическим путем. В современных цифровых корреляторах зачастую имеются сервисные программные средства, позволяющие выполнять такие преобразования в процессе исследований. Следует отметить, что оценка функции спектральной плотности может быть также получена экспериментальным путем на основании реализаций случайного воздействия при отсутствии оценки корреляционной функции. Такая процедура может быть осуществлена с помощью набора узкополосных фильтров, каждый из которых позволяет выделить спектральную составляющую воздействия в пределах своей узкой полосы пропускания + . Исходя из того, что спектральная плотность воздействия является функцией частоты для средних значений квадратов амплитуд гармоник, можно записать
![]()
где х(t, , ) – сигнал на выходе узкополосного фильтра с полосой пропускания ; – ширина полосы пропускания фильтра; Т – интервал времени, в течение которого осуществляется исследование случайного воздействия.
Вопросы оценки точности получаемых экспериментальным путем автокорреляционной функции и функции спектральной плотности рассмотрены в работах [17, 18]. Там же приводятся выражения, описывающие зависимость погрешности таких оценок от величин Т и . Для инженерных расчетов достаточно высокая точность оценок будет иметь место при выполнении условия 100.