

Федеральное агентство по образованию

Санкт-Петербургский государственный
электротехнический университет «ЛЭТИ»

Кафедра ВТ
Реферат № 5
по дисциплине
«Алгоритмы и процессоры цифровой обработки сигналов» на тему
«Цифровые фильтры»
Выполнил:
Группа:
Санкт-Петербург
2013 Оглавление
Оглавление 2
Рекурсивные фильтры 4
Нерекурсивные фильтры 5
Структурные схемы цифровых фильтров 6
Соединение фильтров 8
Схемы реализации 8
Проектирование фильтров 9
Сравнительная оценка фильтров 10
Фильтр - это частотно-избирательное устройство, которое пропускает сигналы определенных частот и задерживает или ослабляет сигналы других частот. Фильтры могут быть классифицированы по ряду признаков:
По виду АЧХ они разделяются на:
- фильтры нижних частот (ФНЧ);
- фильтры верхних частот (ФВЧ);
- полосовые фильтры (ПФ);
- заграждающие фильтры (РЖ).
В отдельную группу могут быть выделены фазовые фильтры (ФФ);
В зависимости от полиномов, используемых при аппроксимации передаточной функции, различают фильтры: критического затухания, Бесселя, Баттерворта, Чебышева;
По элементной базе фильтры разделяются на: пассивные и активные фильтры. Активные фильтры включают в схему RLC – фильтра активного элемента, в качестве которых часто используются операционные усилители.
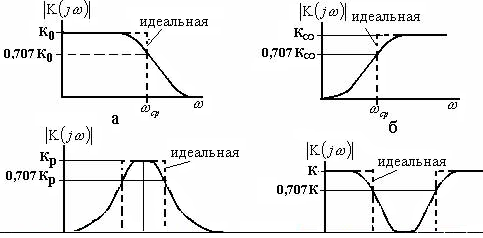
Фильтр нижних частот – пропускает низкие частоты и задерживает высокие (а), фильтр верхних частот – задерживает низкие частоты и пропускает высокие (б), полосовой фильтр – пропускает полосу частот от ω1 до ω2 и задерживает те частоты, которые расположены выше или ниже этой полосы частот (в), заграждающий фильтр – задерживает полосу частот от ω1 до ω2 и пропускает частоты, расположенные выше или ниже этой полосы частот (г).
В указанных фильтрах коэффициент передачи и фазовый сдвиг зависят от частоты входного сигнала. Фильтры, у которых коэффициент передачи остается постоянным, а фазовый сдвиг зависит от частоты, называются фазовыми фильтрами.
В зависимости от аппроксимирующего полинома фильтры разделяются на фильтры критического затухания, Бесселя, Баттерворта и Чебышева. При изложении принципа построения аппроксимирующих функций фильтров как основу обычно используют ФНЧ. На рисунке ниже показаны АЧХ указанных фильтров нижних частот.
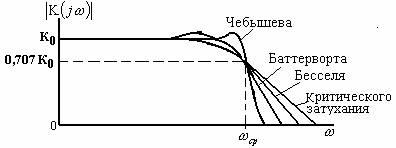
АЧХ ФНЧ Баттерворта имеет довольно длинный горизонтальный участок и резко спадает за частотой среза. Переходная характеристика такого фильтра при ступенчатом входном сигнале имеет колебательный характер. С увеличением порядка фильтра колебания усиливаются.
Характеристика фильтра Чебышева спадает более круто за частотой среза. В полосе пропускания она имеет волнообразный характер с постоянной амплитудой. Колебания переходного процесса при ступенчатом входном сигнале сильнее, чем у фильтра Баттерворта.
Фильтр Бесселя характеризуется меньшей длиной горизонтального участка, чем фильтр Баттеворта и более пологим спадом АЧХ за частотой среза, чем фильтры Баттерворта и Чебышева.
Фильтр критического затухания обладает значительно худшей амплитудно-частотной характеристикой по сравнению с фильтром Бесселя, но не имеет перерегулирования. В общем, фильтр критического затухания уступает фильтру Бесселя в отношении качества отработки входного ступенчатого сигнала.
Рекурсивные фильтры
Дискретные системы, в которых реакция зависит от воздействия и от реакции в предыдущие моменты времени называются рекурсивными и описываются общей формулой разностного уравнения:

В отличие от нерекурсивных фильтров рекурсивные фильтры содержат обратные связи.
Порядок рекурсивной дискретной линейной системы определяется порядком разностного уравнения. В общем случае число коэффициентов b (= n+1) и a (= m+1) могут не совпадать, в этом случае порядок определяется наибольшим значением (если m>n – порядок m, в противном случае – порядок n).
Импульсная характеристика рекурсивной системы рассчитывается намного сложнее, чем для нерекурсивной в виду наличия обратных связей.
Подадим на вход рекурсивной системы, описываемой формулой 1 единичную импульсную функцию x0(k).
Тогда (исходя из свойств x0(k), которая равна 0 при всех k, отличных от 0 и равна 1 при k=0)
h(0) = b0
h(1) = b1 + a1· h(0) = b1 + a1·b0
h(2) = b2 + a1· h(1) + a2· h(0) = b2 + a1· [b1 + a1·b0] + a2· b0
Вычисление импульсной характеристики рекурсивного фильтра можно продолжать до бесконечности. По этой причине данные фильтры называют фильтрами с бесконечной импульсной характеристикой или БИХ-фильтрами.
По причине наличия обратных связей и бесконечности импульсной характеристики рекурсивные фильтры могут быть неустойчивыми.