Рефераты АпЦ / Реферат 3
.docФедеральное агентство по образованию

Санкт-Петербургский государственный
электротехнический университет «ЛЭТИ»

Кафедра ВТ
Реферат № 3
по дисциплине
«Алгоритмы и процессоры цифровой обработки сигналов» на тему
«Линейные дискретные системы с постоянными параметрами»
Выполнил:
Группа:
Санкт-Петербург
2013
Оглавление
Линейные разностные уравнения 3
Импульсная характеристика дискретной ЛПП-системы 4
1.Условие физической реализуемости 5
2.Условие устойчивости системы 6
Частотная характеристика дискретной ЛПП-системы 7
Z-преобразование 9
Примеры ЛПП-систем 10
ЛПП-система – линейная система с постоянными параметрами.
Линейные разностные уравнения
Линейные системы можно описать с помощью разностных уравнений. По структуре эти уравнения напоминают дифференциальные уравнения непрерывных систем. Сначала рассмотрим понятия о конечных разностях для дискретной функции х(iТn). Нулевой конечной разностью называется само значение дискретной функции и обозначается через Δ0 x(iTn) = x(iTn)
Это понятие аналогично нулевой производной непрерывной функции.
Первой конечной разностью называется выражение Δ1 x(iTn) = (iTn) - x[(i-1)Tn], где x[(i-1)Tn] - значение функции в предшествующем периоде следования. Δ1 x(iTn) определяет приращение функции на период и по смыслу близко к понятию первой производной непрерывных функций.

Вторая разность равна разности первых разностей:
Δ2 x(iTn) = Δ1 - Δ1 x[(i-1)Tn] = x(iTn)-2x[(i-1)Tn]+ x[(i-2)Tn].
Третья разность равна разности вторых разностей:
Δ3 x(iTn) = Δ2 x(iTn) - Δ2 x[(i-1)Tn] = x(iTn) - 3x[(i-1)Tn] + 3x[(i-2)Tn] - 3x[(i-2)Tn]- x[(i-3)Tn],
и, в общем случае, разность k-го порядка
Δk x(iTn) = Δk-1 x(iTn) - Δk-1 x[(i-1)Tn].
Этой разности можно сопоставить понятие k-й производной непрерывной функции. k-ю разность можно выразить через значения дискретной функции следующим образом:
Δk x(iTn) = x(iTn) - kx[(i-1)Tn] + C2k x[(i-2)Tn] - C3k x[(i-3)Tn] + + ... - Ck-1k x[(i-k+1)Tn] + x[(i-k)Tn],
где С1k - число сочетаний из k по r.
Разностное уравнение дискретной системы устанавливает соответствие между входным и выходным дискретными процессами и их разностями. Линейным системам соответствует линейное соотношение между этими переменными, которое имеет вид:
![]()
Данное
уравнение называется линейным
конечно-разностным уравнением и по
своей структуре соответствует линейному
дифференциальному уравнению.
Коэффициенты ![]() и
и ![]() определяются
параметрами системы, в том числе они
зависят от периода повторения Tn.
Если параметры системы не зависят от
времени, то коэффициенты уравнения
будут постоянными и система называется
стационарной.
определяются
параметрами системы, в том числе они
зависят от периода повторения Tn.
Если параметры системы не зависят от
времени, то коэффициенты уравнения
будут постоянными и система называется
стационарной.
Максимальный порядок п разности выходного процесса называется порядком уравнения или порядком дискретной системы. Решение разностного уравнения можно записать в виде суммы
y(iTn) = yn(iTn)+ yx(iTn),
которая состоит из дискретного переходного процесса yn(iTn) и вынужденного процесса yx(iTn).
Переходный процесс находится из решения однородного уравнения
![]()
при начальных условиях у(0), Δ1 y(0), ... , Δn-1 y(0) для момента включения системы t = 0. Вынужденный процесс yx(iTn) является частным решением при нулевых начальных условиях и заданном воздействии х(iTn).
Импульсная характеристика дискретной ЛПП-системы
В теории ЛПП-систем важное место занимает сигнал «единичный импульс»:
![]()
Любой дискретный сигнал может быть представлен в виде свертки его самого же с единичным импульсом
![]() .
.
Подадим на вход дискретной ЛПП-системы тестовый сигнал “единичный импульс” и получим его отклик.
h(n)=A[u0(n)], -∞ < n < +∞
Этот отклик будет каким-то определенной для данной ЛПП-системы Данная функция определяет ЛПП-систему, поэтому ее называют импульсной характеристикой дискретной ЛПП-системы. Если известна импульсная характеристика, то при всяком известном входном сигнале возможно рассчитать выходной сигнал по формуле :
![]() (1)
(1)
Соотношения такого типа называют дискретными свертками. Можно сказать, что выход дискретной ЛПП-системы представляет собой дискретную свертку входного сигнала с импульсной характеристикой системы.
Многие дискретные ЛПП-системы, в частности реализуемые в виде цифровых устройств, должны удовлетворять следующим двум важным условиям.
-
Условие физической реализуемости
Выход y(n) зависит только от x(m), m≤n, т.е. не зависит от будущих значений входного сигнала. Это условие выполняется, если
![]()
В этом случае возможно переписать формулу выходного сигнала (1):
![]()
Т.е. каждый отсчет выходного сигнала определяется взвешенной суммой текущего и предыдущих отсчетов входного сигнала. При бесконечном суммировании возможно получить бесконечные значения выходного сигнала. Из-за этого нужно наложить дополнительные ограничения на импульсную характеристику.
-
Условие устойчивости системы
Система
устойчива, если из условия ![]() следует
следует ![]() .
Необходимым и достаточным условием
устойчивости дискретной ЛПП-системы
является следующее ограничение на
импульсную характеристику:
.
Необходимым и достаточным условием
устойчивости дискретной ЛПП-системы
является следующее ограничение на
импульсную характеристику:
![]() ,
которое может быть выполнено при
достаточно быстром убывании импульсной
характеристикой при больших по модулю
значениях индекса m.
,
которое может быть выполнено при
достаточно быстром убывании импульсной
характеристикой при больших по модулю
значениях индекса m.
Частотная характеристика дискретной ЛПП-системы
Дискретная
ЛПП-система однозначно определяется
своей импульсной характеристикой h(n),
поскольку она дает возможность предсказать
выход системы при любом вход. Частотная
характеристика ЛПП-системы ![]() позволяет описать свойства ЛПП-системы.
позволяет описать свойства ЛПП-системы.
Подадим
на вход системы дискретизированную
комплексную синусоиду частоты
![]() :
:
![]() ,
,
![]()
Подставив это в формулу (1), и получим, что выходной сигнал может быть записан в виде:
![]()
где
комплексный коэффициент ![]() есть преобразование Фурье для импульсной
характеристики:
есть преобразование Фурье для импульсной
характеристики:
![]()
Дискретная
синусоида остается синусоидой той же
частоты
![]() .
Действие комплексного коэффициента
.
Действие комплексного коэффициента
![]() приводит лишь к изменению амплитуды
синусоиды в
приводит лишь к изменению амплитуды
синусоиды в ![]() раз, и фазовой задержке на величину
раз, и фазовой задержке на величину
![]() радиан.
радиан.
Произвольный дискретный сигнал x(n) может быть представлен в виде преобразования Фурье:
![]() ,
,
фактически
представляющего собой суперпозицию
комплексных синусоид всех частот из
интервала [-π,
π]. ![]() - частотный спектр сигнала:
- частотный спектр сигнала:
![]()
Подадим сигнал x(n) на вход ЛПП-системы. Учитывая свойство линейности системы и соотношения (10)-(11), выходной сигнал можно представить в виде:
![]()
Отсюда можно сделать 2 вывода:
-
Зная функцию
 на интервале частот [-π,
π], мы имеем
возможность рассчитывать выход системы
при любом известном входе. Следовательно,
как и импульсная характеристика h(n),
функция
на интервале частот [-π,
π], мы имеем
возможность рассчитывать выход системы
при любом известном входе. Следовательно,
как и импульсная характеристика h(n),
функция  тоже определяет дискретную ЛПП-систему.
тоже определяет дискретную ЛПП-систему. -
Функция
 определяет закон преобразования
частотного спектра входного сигнала
в частотный спектр сигнала на выходе
дискретной ЛПП-системы:
определяет закон преобразования
частотного спектра входного сигнала
в частотный спектр сигнала на выходе
дискретной ЛПП-системы:
![]()
Учитывая
все это, функцию ![]() ,
определяемую соотношением
,
определяемую соотношением
![]() ,
называют частотной характеристикой
дискретной ЛПП-системы.
,
называют частотной характеристикой
дискретной ЛПП-системы.
Z-преобразование
Z-преобразование представляет собой разложение функций в ряды степенных полиномов по z.
Произвольной
непрерывной функции s(t), равномерно
дискретизированной и отображенной
отсчетами ![]() ,
равно как и непосредственно дискретной
функции, можно поставить в однозначное
соответствие степенной полином по z,
последовательными коэффициентами
которого являются значения
,
равно как и непосредственно дискретной
функции, можно поставить в однозначное
соответствие степенной полином по z,
последовательными коэффициентами
которого являются значения
sk:![]()
где
![]() - произвольная комплексная переменная.
В показательной форме
- произвольная комплексная переменная.
В показательной форме ![]() где r = |z| =
где r = |z| = ![]() ,
,
![]() ).
).
В каузальных системах значения импульсного отклика систем существуют при k ≥ 0 и уравнение действует в одностороннем варианте:
H(z)
=![]() hk
zk.
hk
zk.
В общем случае, z-преобразование – это степенной ряд с бесконечным количеством членов, поэтому он может сходиться не для всего пространства значений z. Область z, в которой z-преобразование сходится и значения S(z) конечны, называют областью сходимости.
Z-образы с положительными степенями z соответствуют каузальным (физически реализуемым) процессам и системам, которые работают в реальном масштабе времени с текущими и «прошлыми» значениями сигналов. При обработке информации на ЭВМ каузальность сигналов не относится к числу ограничений и возможно использование отрицательных степеней z, соответствующих отсчетам сигналов «вперед». Последнее применяется, например, при синтезе симметричных операторов фильтров, что позволяет производить обработку информации без внесения в сигнал фазовых искажений. При использовании символики z-1 «прошлым» значениям соответствуют значения с отрицательными степенями z, «будущим» – с положительными.
Основное достоинство z-преобразований заключается в простоте математических операций со степенными полиномами, что имеет немаловажное значение при расчетах цифровых фильтров и в спектральном анализе.
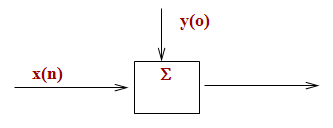
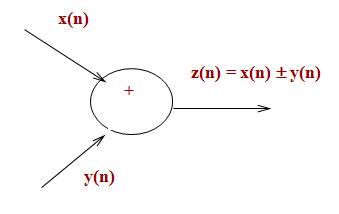
Примеры ЛПП-систем
Сумматор:
Усилитель:

Накопитель: