

20. Методы автоматизирования проектирования мпп
 МПП
выполняются из нескольких пластин с
расположенными на них печат-ными
проводниками
МПП
выполняются из нескольких пластин с
расположенными на них печат-ными
проводниками
21. Особенности задач размещения и трассировки мпп
1. На МПП в основном устанавливают микросхему по обеим сторонам платы
2. Высокая плотность связей при высоком быстродействии эл-ов, что приводит к необходимости учета влияния линии связи на работу элементов
3. Увеличение кол-ва слоев обеспечивает полную автоматическую трас-сировку соединений и при этом должно быть min.
4. Трассы в соседних слоях прокладывают ортогонально
5. Цепи заземления и питания размещаются в одном внутреннем слое
22. Алгоритм трассировки мпп. Задача расслоения мпп
Зависит от технологии изготовления МПП. Если каждая пара слоев вы-полнена как отдельная ПП спрессовывается в пакет, то используется ал-горитм ОПП и ДПП. Если МПП изготавливается методом сквозной ме-таллизации отверстий, то трассировка выполняется по этапам:
- определяется порядок соединения всех проводников, которые должны быть расположены между парами контактов. Применяется алгоритм по-строения min связывающих деревьев
- распределение проводников по слоям
- определение порядка трассировки проводников в отдельном слое, ис-пользуется задача расслоения
- трассировка проводников
- перетрассировка для улучшения качественных показателей МПП, ис-пользуется модификация волнового алгоритма
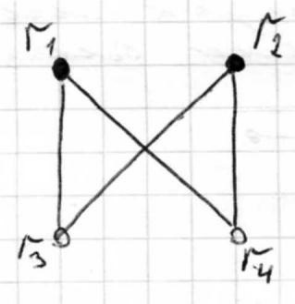
ЗАДАЧА РАССЛОЕНИЯ МПП
Для системы проводников составляется граф пе-ресечений
вершина которого соответствует проводникам, а ребра
их пересечениям.

Хроматическим числом графа называется наимень-шее кол-во
цветов с помощью которых можно раскрасить его вершины
так, чтобы в нем не было ни одного ребра соединя-ющего
вершину одного цвета.
Число
слоев МПП равно хроматическому числу
графа
Результат расслоения проводников

В одном слое размещаются только проводники одного цвета
23. ТОПОЛОГИЧЕСКИЕ МЕТОДЫ ТРАССИРОВКИ МПП. АТОМАТИЗАЦИЯ ГЕОМЕТРИЧЕСКОГО ПРОЕКТИРОВАНИЯ
Этапы:
1. Построение модели, схем соединений
2. Построение топологической модели слоя МПП
3. Определение топологической и геометрической укладок модели схемы на модели слоя

При топологической укладке соединений положение трасс жестко не фиксируется и каждая послед. трасса может деформировать уже прове-денные. При топологическом подходе число слоев ПП уменьшается в 2 раза по сравнению с использованием волнового алгоритма.
АТОМАТИЗАЦИЯ ГЕОМЕТРИЧЕСКОГО ПРОЕКТИРОВАНИЯ
На всех стадиях проектирования изделий применяется графич. инфор-мация: графики ф-ий, изображение схем, чертежи и фотографии.
При проектировании топологии ПП исходной инф-ей яв-ся схема элик-трич. принцип., а результатом чертеж топологии и фото шаблонов ПП.
При проектировании блоков вычислит. аппаратуры исходной яв-ся функциональная схема, результатом - сборочные чертежи блоков.
ГЕОМЕТРИЧЕСКИЕ МОДЕЛИ
Для предоставления объекта любой сложности используются базовые геометрические фигуры связанные геометрическими отношениями. Для отображения св-тв геометрич. объектов используется след. типы геомет-рических моделей:
1.Структурная геометрическая модель представляются графами, вер-шины отображают элементы объекта, дуги связь между ними.
2.Рецепторные геометрические модели. Описывают объект в про-странстве рецепторов. При сечении пространства плоскостями перпенди-кулярно осям

Координат образуется пространственная сетка каждый эл-нт
которого яв-ся рецептором. Рецептор может иметь 2 значения:
1 – если он содержит элемент объекта, 0 – если нет
На основании результатов пересечения строится рецепторная модель в виде матрицы координат. Для измерения формы геометрического объек-та выполняются преобразования этой матрицы.