

13.Типы монтажных пространств. Математич. Модели модели монтажно-комутационного пространства.
Монтажным (коммутационным) пространством конструктивного модуля называют область ограниченную габаритами этого модуля в которой осущ-ся электрические соединения контактов модулей низшего уровня. Различают регулярные и нерегулярные монтажные пространства.
Регулярные – это прямоуг. обл. с постоянным шагом размещения однотип-ных эл-ов и конечным числом позиций размещения и числом слоев для трас-сировки проводников.
Нерегулярные – это прямогольная обл. с неравномерным шагом и располо-жением модулей различных размеров.
Для решения задач трассировки на ЭВМ необходимо определение мат. мод. пространст-го монтажа и принцип. эл-ой схемы проектируемого устройства.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ МОНТАЖНО-КОММУТАЦИОННОГО ПРО-СТРАНСТВА (МКП)
1. Эвристическая дискретная модель.
МКП разбивается на элементарные площадки, каждая из которых предна-значена для размещения одного модуля. Эти площадки называются дискре-тами рабочего поля (ДРП).

Каждый ДРП может быть пустым, занятый эл-ом, контактной площадкой, электрич. проводником. Эти параметры фиксируются в матрице.
2. Взвешанный граф мкп
Обозначается V6(S.V) представляет собой симметрический граф в котором множество вершин S соответствует множеству позиций в МКП для модулей, а множество ветвей V- это связи между позициями. В каждой ветви графа Vij присваивается вес Pij равный числу условных единиц, рассояний между цен-трами позиций.

Для
описания взвешенного графа используется
матрица смежности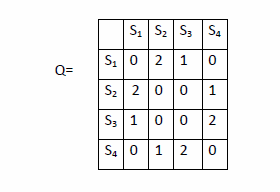
14. Математическая модель схемы электрической принципиальной.
Схема электрических соединений описывается гиер графами. Гипер граф обозначается G(E,V), где E – элементы схемы, V – электрические цепи

Электрическая схема соединений

Модуль схемы в виде гипер графа
По гипер графу составляется матрица инцинденций.
С
помощью матрицы инцинденций точно
определяют число электрических
соедине-ний между всеми элементами
электриче-скойсхемы дя оптимизации
размещения элементов на ПП.
15.
Трассировка проводных соединений.
Алгоритм трассировки проводных соединений
в навал.
Существует 3 способа:
1. Монтаж в навал – по прямым, соединяющим контакты отдельных компонентов
Достоинства: простота, высокая помехоустойчивость
Недостатки: трудность контроля и ремонта
2. Жгутовый монтаж – объединение проводников в жгуты
Достоинства: технологичен, прост в контроле
Недостатки: малая помехоустойчивость из-за больших параллельных участ-ков проводов
3. Монтаж по каналам. В МКП предусмотрены каналы
Достоинства: минимальный объем
Недостатки: дорогой, мало помехоустойчив
АЛГОРИТМ ТРАССИРОВКИ ПРОВОДНЫХ СОЕДИНЕНИЙ В НАВАЛ
Алгоритм прима – этот алгоритм позволяет строить кротчайшие связываю-щие сети, выполняется в несколько этапов:
Упорядочивается расположение контактов в соответствии с электри-ческими соединениями и формируется матрица длин D, строки и столбцы которой соответствуют множеству контактов устройства соединения между которыми трассируются, а элементы равны расстоянию между контактами.
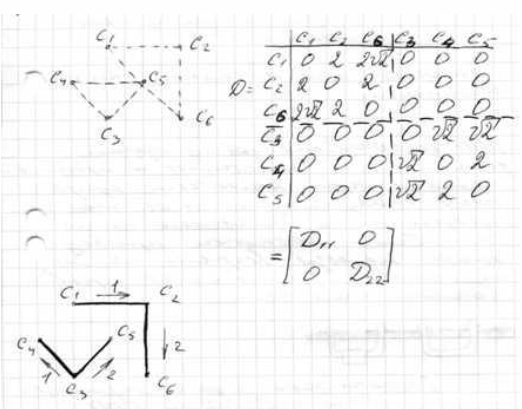
2. Выбирается электрическое соединение и контакт сj(c1) от которого начинается трассировка. В первой строке, первой подматрицы D11 находят ближайшие к сj контакт (с2) и соединяют их.
3. Столбец и строка матрицы длин D соответствующей контакту сj ис-ключаются из матрицы.
4. Если не все контакты соединены, то переходим к шагу 2.