

Глава 9 судовые движители
9.1 Классификация судовых движителей
Движителем называется устройство создающее силу (упор) для преодоления силы сопротивления воды движению судна.
Различают движители активные и реактивные. К активным относятся различные паруса и воздушные «змеи», движущие судно за счет силы ветра.
К реактивным относятся движители, создающие силу упора путем отбрасывания масс воды в сторону, противоположную направлению движения судна.
Реактивные движители подразделяются на лопастные (весла, колесные, крыльчатые, плавниковые, винтовые) и водопроточные (водометные и гидрореактивные).
Водометные движители располагаются внутри или снаружи корпуса судна, а эффективность их работы зависит от формы водоводов, места расположения и конструкции водозаборников. Их дальнейшим развитием являются движители насосного типа.
В гидрореактивном движителе для ускорения потока воды используется энергия сжатого воздуха или продуктов сгорания, подаваемых в водовод через сопло. Характерная особенность таких устройств – отсутствие валопровода и механического рабочего органа.
Различают:
-
тепловые – прямоточные (пароводяная смесь образуется в камере, куда подается пар или горячий газ, создающий движущую силу);
-
пульсирующие (поршневого типа с пульсирующей газоводяной камерой сгорания, с реактивной газоводяной трубой взрывного типа и др);
-
эжекционные и другие, использующие энергию холодного сжатого газа, ускоряющего поток водовоздушной смеси.
Гребной винт всегда согласован с двигателем, в противном случае будет происходить бесцельная потеря мощности. Кроме того, встречаются нереверсивные двигатели, которые не способны изменять направление вращения вала. В этих случаях применяют гребной винт регулируемого шага. В его ступице располагается механизм, поворачивающий лопасти на заданный угол и удерживает их в таком положении. Поворот лопастей позволяет изменять тяговое усилие при постоянной частоте вращения гребного вала и наоборот, сохранять постоянное тяговое усилие при разных частотах вращения вала, а также вообще изменять направление упора (реверс) при неизменном направлении вращения гребного вала (рис. 9.1).
Для передачи большой мощности часто применяют двух - и трехвальные установки. Иногда применяются направляющие насадки, что при малой частоте вращения гребного винта обеспечивает прирост упора до шести процентов (6%). Увеличение эффективности винтов также достигают путем применения соосных гребных винтов противоположного вращения (рис. 9.1).

Рис 9.1 Типы гребных винтов
а) гребной винт с неподвижными лопастями; б) винт регулируемого шага; в) винт в насадке; г) соосные гребные винты противоположного вращения.
В последнее время на судах стали широко применять движительно- рулевые системы “Azipod”, которые представляют собой размещенный в гондоле главный электродвигатель, приводящий в движение винт фиксированного шага и рулевой механизм, поворачивающий гондолу на 360° (Рис. 9.2). Гондола и колонка, соединяющаяся с корпусом судна увеличивают сопротивление воды судну, но зато нет потерь в валопроводе.
Чтобы обойти этот недостаток создан новый винто-рулевой комплекс “Schotten Combi Drive”, представляющий собой двойной винт, установленный на концах гондолы (Рис. 9.3). Привод этого комплекса отличается тем, что электродвигатель расположен не в гондоле, а встроен в вертикальную поворотную колонку и приводит винт во вращение через короткий вал и угловую передачу. Это позволило значительно уменьшить размеры гондолы и колонки и снизить сопротивление и воды, но есть потери в угловой передаче.
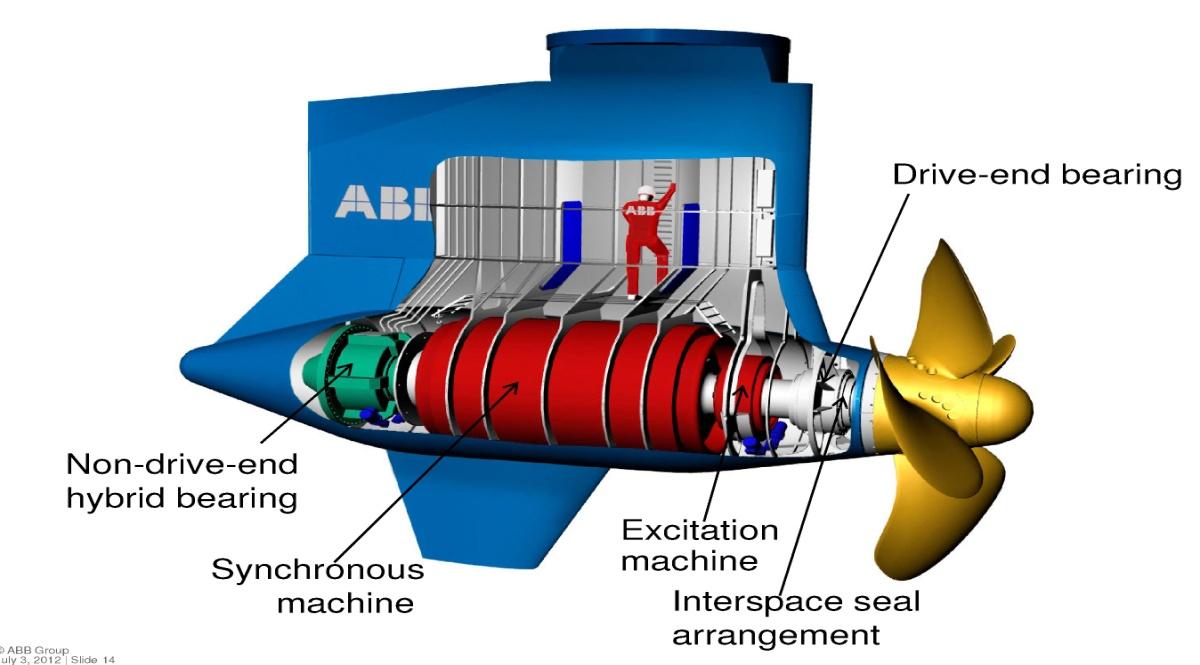
Рис. 9.2 Винто-рулевой комплекс “Azipod”.
.
Рис. 9.3 Винто-рулевой комплекс “Schotten Combi Drive”.