

2.1.3 Исследование влияния параметров на устойчивость системы.
Исследование проводится методом D – разбиений, и область устойчивости строится в плоскости двух задаваемых параметров системы: постоянная времени объекта управления Tо и коэффициент усиления объекта kо. Для выполнения исследования необходимо найти характеристический комплекс системы [1]. Для этой цели характеристический полином G(p) системы выражение (21) преобразуется таким образом, что вместо числовых значений исследуемых параметров в него бы вошли их буквенные обозначения(30):
С(p) = (Tо×p+1)p + kо·kим·kд· kр (29)
C(p) = (Tо×p+1)p + kо×199 (30)
Преобразуем характеристический полином в характеристический комплекс подстановкой p=jω в выражение (30) :
G(jω) = (Tо×jω+1) jω + kо×199 (31)
Запишем условия для граничной устойчивости системы:
 (32)
(32)
Решив систему уравнений граничной устойчивости найдем параметрические уравнения границы области устойчивости.
 (33)
(33)
При ω=0: K=0, T=∞
Используем условия устойчивости:
с0=0 и с2=0, что дает Tо=0 и kо=0.
Область устойчивости в соответствии с полученными выражениями показана на рис.12.
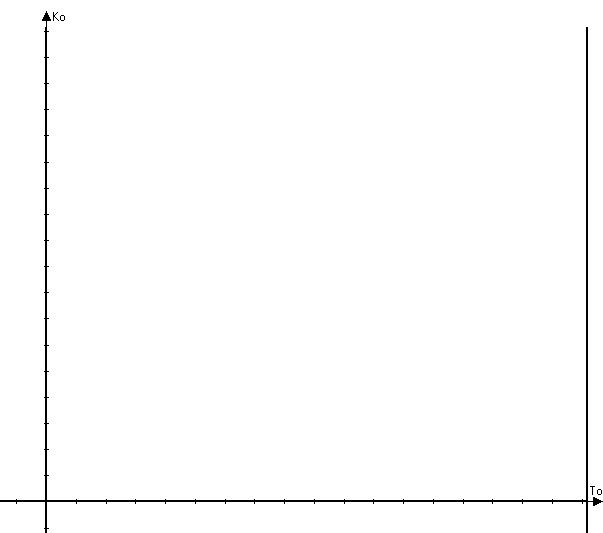

























рис. 12. Область устойчивости
Область допустимых значений - Ko > 0 и To > 0.
Правило штриховки. Для его применения найдем определитель[1]:
 (34)
(34)
![]() (35)
(35)
Таким образом,
![]()
Следовательно, определитель положителен для положительных частот и штриховка должна вестись от кривой при движении по ней в сторону возрастания частот.
Для проверки построений на графике нанесем точку (kо,То) (зависящие от ω). Примем точку А с координатами (1.18; 0,05); точка принадлежит полученной области устойчивости, следовательно область устойчивости построена верно.
2.2 Исследование качества системы
2.2.1 Уравнение переходного процесса в системе
Передаточная функция замкнутой системы [2]:
Ф(р)
= ![]() ,
(36)
,
(36)
где: А(р) и G(p) – степень полинома от p, тогда дифференциальное уравнение системы в операторной форме будет иметь вид:
G(p)·y(p) = A(p)·x(p), (37)
где: р - оператор дифференцирования; y(p)- выходной сигнал системы; x(t)- входное воздействие.
По графику ЛАХ КП.2068.998-26-8-00.00.000Д1 определяем что для улучшения качества системы необходимо уменьшить частоту среза ωср[1]. Для данной системы наиболее удачно подходит пропорциональный регулятор с коэффициентом усиления kрег – 0,1[2]. Передаточная функция системы примет значение:
W(p) =, (38)
Входным воздействием принимается единичная ступенчатая функция x(t) = 1(t), а выражение G(p) подставим из (37), А(р) принимаем равным К. Тогда уравнение системы(38) примет следующий вид:
(0,05p2+p+19,9) *y(t)=19,9(t) (39)