

МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Ухтинский государственный технический университет»
(УГТУ)
Конспект лекций по дисциплине
"Роботы и манипуляторы"
для студентов очной и заочной формы обучения,
обучающихся по специальностям 270102 "ПГС, 270109 ТГВ, 270112 ВВ",
автор: Михитаров А.Р.
Ухта 2013
Лекция 1
Введение
Слово «робот» происходит от чешского слова «robota», означающего работу. Впервые это слово прозвучало в пьесе К.Чапека «Р.У.Р» в 1921г.
Современное значение слова «робот» - автоматическое устройство, которое выполняет функции, обычно приписываемые человеку. В соответствии с этим определением стиральная машина является роботом.
Более точное определение промышленных роботов: «перепрограммируемый многофункциональный манипулятор, предназначенный для осуществления различных, заранее заданных перемещений материалов, деталей, инструментов или специальных приспособлений с целью выполнения различных работ».
Современный промышленный робот – универсальный, оснащенный компьютером манипулятор, состоящий из нескольких твердых звеньев, последовательно соединенных вращательными или поступательными сочленениями.
Робот состоит из двух основных частей—исполнительных систем и информационно-управляющей системы с сенсорной системой. В свою очередь исполнительные системы включают манипуляционную систему (обычно в виде механических манипуляторов) и системы передвижения, имеющиеся только у мобильных (подвижных) роботов.
Манипулятор — оснащенное рабочим органом механическое устройство, предназначенное для перемещения в пространстве тела (объекта манипулирования), удерживаемого захватом. Манипулятор (лат, — кисть руки) можно рассматривать как аналог руки человека. Его конструкция в большей степени определяет возможности робота.
Относительное положение соседних звеньев м-ра определяется относительными (обобщёнными) координатами q(q1,q2,…,qn), где n─число степеней подвижности манипулятора. Степени подвижности м-ра делятся на переносные и ориентирующие. Переносные служат для перемещения рабочего органа в рабочей зоне манипулятора, а ориентирующие,— для его угловой ориентации. Современные манипуляторы в среднем имеют 4 — 6 степеней подвижности, но существуют манипуляторы и с 8 — 9 степенями. Количество манипуляторов у роботов обычно ограничено одним, но не более 4.
 Error: Reference source not found
Error: Reference source not found
Рисунок 1.1. Функциональная схема робота
Классификация роботов по назначению
Промышленные роботы (ПР) составляют 85-90% всех роботов. Например, в ФРГ ПР применяются:
Керамическая промышленность: выдавливание керамического сырья, загрузка вальцовых (крокетных) машин, извлечение сформованных изделий, складирование, покрытие глазурью путем окунания, нанесение глазури пульверизатором, шлифовка изделия после обжига, загрузка и разгрузка печей.
Стекольная промышленность: загрузка и разгрузка машин.
Швейная промышленность: загрузка швейных машин.
Деревообрабатывающая промышленность: покрытие лаком, сборка изделий, забивка гвоздей, закручивание винтов.
Производство и обработка кожи: загрузка машин.
Резинообрабатывающая промышленность: распознавание образов, манипулирование шинами.
Асбестообрабатывающая промышленность: разрезка, обточка, шлифовка, штукатурка.
Обработка пластиков: загрузка сырья, разгрузка машин.
Мясообрабатывающая промышленность: рубка мяса.
В немашиностроительных и непромышленных отраслях использования робототехники
Операции |
Тип средств робототехники |
|
|
||||||
Угольная и горнодобывающая промышленность |
|
|
|
|
|||||
Установка крепи в забое |
Мобильный робот с техническим зрением и двумя манипуляторами |
|
|
||||||
Бурение шурфов |
Многоманипуляторный мобильный робот с навигационной системой |
|
|
||||||
Отделение угля от породы |
Робот с техническим зрением и другими средствами очувствления |
|
|
||||||
Погрузка горной массы Погрузочно-разгрузочные работы в обогатительном производстве |
Мобильный робот-погрузчик |
|
|
||||||
Металлургия |
|
|
|
|
|||||
Загрузка чушек и металлолома в печь |
Манипулятор с управлением |
|
|
|
|
||||
Ремонт огнеупорной кладки печей, |
Мобильный робот |
|
|
|
|
||||
Пробивка корки шлака и устранение анодного эффекта при электролизе алюминия |
|
|
|
|
|
||||
Извлечение штырей в электролизерах и их перестановка |
|
|
|
|
|
||||
Укладка и обвязка пакетов чушек, их погрузка и доставка |
|
|
|
|
|
||||
Лесозаготовительное производство |
|
|
|||||||
Валочно-пакетирующие работы на лесосеках |
Манипулятор с управлением от оператора |
|
|||||||
Деревообрабатывающее производство |
|
|
|||||||
Погрузочные работы |
Те же средства что и в машиностроительном производстве |
|
|||||||
Строительная промышленность |
|
|
|||||||
Укладка кирпичей |
Робот-каменщик |
|
|||||||
Сортировка кирпича на конвейере |
Робот с техническим зрением и дальномерной системой |
||
Загрузка печей кирпичами и выгрузка |
|||
Облицовочные работы |
Робот для монтажа облицовочных плиток |
||
Монтаж металлоконструкций (зданий, мостов, резервуаров и т.п.) |
Робот-монтажник-высотник |
||
Окрасочные работы |
Робот-маляр |
||
Лёгкая и пищевая промышленность |
|||
Обслуживание основного технологического оборудования (прядильных и швейных машин, агрегатов, формирующих синтетические нити, процессов горячей вулканизации, печей для обжига керамических изделий и др. |
Средства робототехники ,как и в машиностроении |
||
Внутрицеховые погрузочно-разгрузочные и транспортные работы |
|||
Раскрой кожи и других материалов |
|||
Укладка в тару конфет, овощей при консервировании и т.п. |
|||
Погрузочно-разгрузочные работы в холодильниках |
|||
Транспорт |
|||
Погрузочно-разгрузочные работы |
То же |
||
Регламентное обслуживание ж-д путей |
|||
Шагающие транспортные машины |
|||
Агропромышленное производство |
|||
Уборка овощей и фруктов |
|
||
Прополка и прореживание о овощей |
Робот с техническим зрением для работы в комплексе с прореживателями |
||
Обслуживание теплиц |
Мобильный робот (для выращивания рассады, уборки продукции) |
||
Товарная доработка плодоовощной продукции (сортировка и загрузка в контейнеры) |
Робот с техническим зрением и другими сенсорными системами |
||
Обслуживание комплексов для крупного рогатого скота и свиноводческих |
|||
Дойка и санитарная обработка вымени коров Стрижка овец |
|
||
Погрузочно-разгрузочные работы с сельхоз продукцией, сеном, силосом, удобрениями |
Средства робототехники, как и в машиностроении |
||
Вождение тракторов других сельхоз машин |
Робот-тракторист |
||
Медицина |
|||
Хирургия (микрохирургия, дистанционная хирургия, стерильная хирургия) |
Прецизионные роботы и манипуляторы, управляемые оператором |
||
Внутриполостная и внутисосудистая диагностика |
Мобильные микророботы |
||
Протезирование конечностей |
|||
Реабилитация инвалидов и больных |
Робот для массажа и физических упражнений |
||
Уход за больными и инвалидами |
Робот-сиделка |
||
Помощь при передвижении слепых людей |
Робот-поводырь |
||
Сфера обслуживания |
|||
Погрузочно-разгрузочные работы |
Средства робототехники, как и в машиностроении |
||
Охрана помещений |
Робот с техническим зрением и другими сенсорными системами |
||
Мойка окон высотных зданий |
|||
Уборка помещений |
Бытовые роботы |
||
Уход за детьми |
Робот-нянька и робот-игрушка |
||
Рабочая зона манипулятора – это пространство, в котором находится его рабочий орган при всех возможных положениях звеньев манипуляторов. Форма рабочей зоны определяется, во-первых, типом системы координат (прямоугольная, цилиндрическая, сферическая, угловая (ангулярная) и различные их комбинации).Во-вторых, она зависит от числа степенейподвижности манипулятора (от 1 до 6, свыше 6 их мало, не более 2%);
Подвижность робота определяется наличием или отсутствием у него устройства передвижения (подвижный или стационарный). Подвижные имеют любые типы устройств перемещения: колесные, гусеничные, шагающие, воздушные, ракетные и т.п.


hs
Y
h1
φ2




X


φ1

сферическая система
(рабочая зона —сферический сегмент) рис.1.3
Z

Роботы находят применение в других (кроме промышленности) областях: транспорте (беспилотная авиация, луноходы и т.п.), в сельском хозяйстве, в здравоохранении (протезирование, микрохирургия, и т.п.), в сфере обслуживания (бытовые машины, спасательные работы, торговые автоматы), космос, подводные аппараты и т.п.
Состав манипулятора.
Манипулятор состоит из твёрдых звеньев, последовательно соединённых вращательными или поступательными сочленениями, рабочего органа и приводов.
Рабочие органы манипуляторов
Рабочие органы манипуляторов служат для непосредственного взаимодействия с объектами внешней среды и делятся на захватные устройства и специальный инструмент.Рабочие органы могут быть постоянными и съёмными, в том числе с возможностью их автоматической замены в ходе выполнения технологической операции.
Захватные устройства предназначены для того, чтобы брать объект, удерживать его в процессе манипулирования и освободить его по окончании этого процесса.
Типы захватных устройств: механические устройства-схваты, пневматические и электромагнитные и комбинации этих типов, а также множество специальных захватных устройств.
Схват—это механическое захватное устройство, аналог руки человека. Самые простые двухпальцевые схваты, применяют схваты с 3,4 и реже с большим числом пальцев. Схваты часто очувствляют помощью контактных датчиков, датчиков проскальзывания, усилия и дистанционныхдатчиков, выявляющих предметы вблизи схвата и между его пальцами.
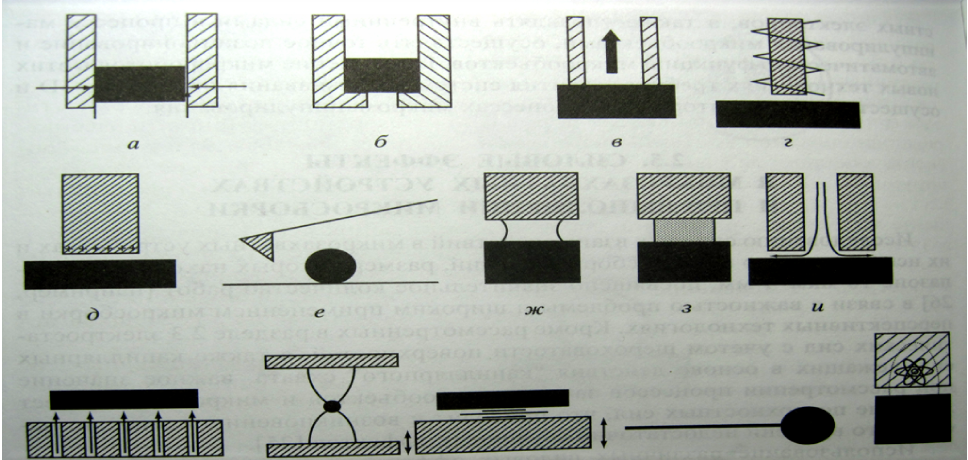
Использование различных силовых эффектов в микрозахватных устройствах
а—захват за счёт сил сухого трения ; б—использование формы объекта для захвата; в—вакуумный захват; г—магнитный захват; д—электростатический захват; е—пушпульный захват; ж—капиллярный захват; з—криогенный захват; и—захват посредством эффекта Бернулли; к—захват «воздушной подушкой»; л—захват за счёт стоячей воды; м—захват сжимающей плёнкой; н—«оптический захват»; о—адгезионный захват
Рабочий инструмент. С его помощью робот выполняет определённые технологические операции (нанесение покрытий, завинчивание гаек, зачистка поверхностей и т.п.) этот инструмент ,как правило, не берется захватным устройством, а непосредственно крепится к манипулятору вместо него. Часто при этом к инструменту необходимо обеспечить подвод энергии или какого-либо рабочего тела. Для окрасочного робота—это краска и воздух к пульверизатору, для сварочного робота— сварочный ток к сварочным клещам при точечной сварке или проволочный электрод, газ и охлаждающая жидкость при дуговой сварке и т.д. Для этого требуется разработка специальной конструкции всего манипулятора.
Привод включает двигатель и устройство управления им. В состав привода могут входить
различные механизмы для передачи и преобразования движения (редукторы), тормоз и муфта. В роботах нашли применение все типы приводов: электрические, гидравлические и пневматические; с поступательным и вращательным движением; регулируемые (по положению и скорости) и нерегулируемые; замкнутые (с обратной связью) и разомкнутые; непрерывного и дискретного действия (в том числе шаговые).
Пневмопривод и гидропривод состоят из двигателя, распределительного устройства и регулятора скорости. Двигатель поступательного движения (пневмо- или гидроцилиндр) или поворотный.
Электроприводы включают электродвигатель, механическую передачу, тормоз, муфту и устройство управления.
Микроприводы : пьезоэлектрические, пьзомагнитные, на эффекте памяти формы, электростатические, электро- и магнитострикционные, биметаллические
Мобильные роботы используют все известные транспортные средства.
Устройство управления робота осуществляет автоматическое управление его исполнительными системами—манипуляционными и передвижения, образуя систему автоматического управления робота.