

Порядок выполнения работы (ход работы)
Усвоить содержание описательной и графической частей практического занятия, по ходу прочтения выписать столбиком условные обозначения с расшифровкой.
Приступить ко вторичному чтению той части задания и на основании структурной схемы , выделить функциональную зависимость элементов всей системы.
Дать физическое описание структурных элементов системы (основнх).
Содержание отчета
1. Тема и цель лабораторной работы..
2. Ответы на вопросы вводного и заключительного контроля.
3. Выполненное задание.
4. Выводы по работе.
Заключительный контроль:
1. Дать определение назначения чувствительного элемента
2. Дать определение назначения измерительного устройства.
3. Дать определение назначения элемента сравнения и его задача.
4. Дать определение назначения исполнительного устройства.
5. Описать функциональнее назначения основных элементов системы.
Литература
Архангельский В. С. Автоматика и аппаратура контроля СЭУ. – Л.: Судостроение, 1992.
Методические указания к выполнению лабораторных работ к ПМ, 01 раздел 4
Лабораторная работа №59.
Дистанционное автоматическое управление (ДАУ) с винтом регулируемого шага (ВРШ). Построение структурной схемы комплексной защита двигателя
Дистанционное автоматическое управление (ДАУ) с винтом регулируемого шага (ВРШ). Построение структурной схемы комплексной защита двигателя
ТЕМА: Дистанционное автоматическое управление (ДАУ) с винтом регулируемого шага (ВРШ). Построение структурной схемы комплекса двигатель-ВРШ.
Цель: освоить работу системы ДАУ. комплекса дизель- ВРШ.
Материальное обеспечение: _ учебный раздаточный материал, плакат.
Вводный контроль: Изменение шага винта позволяет:
— изменять упор винта (и мощность) при неизменной частоте вращения, т.е. обеспечивать работу дизеля по нагрузочной характеристике, что необходимо в случае работы валогенератора;
— улучшать маневренные качества судна, так как одновременное изменение частоты вращения и шага винта позволяет быстрее осуществить маневр; v
— оптимизировать
подачу топлива во всем диапазоне
скоростных режимов;
оптимизировать
подачу топлива во всем диапазоне
скоростных режимов;
— реверсировать винт без наличия специальных реверсивных муфт или механизма реверса и сократить тормозной путь.
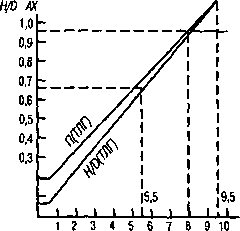
Управление винтом регулируемого шага осуществляется по законам программного или автоматического управления. Например, при маневровых режимах производится программное комбинированное управление шагом H/D и частоты вращения винта п (диаграмма на рис. 106 [2]).
Рис. 106. Диаграмма комбинированного задания частоты вращения и шага винта: H/D - отношение шага винта к его диаметру; ПХ - передний ход; ТЛГ - положение телеграфа на мостике
С увеличением п шаг H/D возрастает, что позволяет более оперативно выполнить маневровый режим.
При дальнейшем увеличении нагрузки воздействие на шаг винта прекращается, и на режимах полного хода дизель работает на характеристике винта фиксированного шага (ВФШ), автоматическое управление ВРШ осуществляется, например, при волнении моря и работе валогенератора. В этом случае с увеличением нагрузки на винт фиксированного шага при попадании винта в гребень волны частота вращения дизеля и валогенератора снижаются, что ухудшает качество электрической энергии.
Схема управления ВРШ представлена на рис. 107.
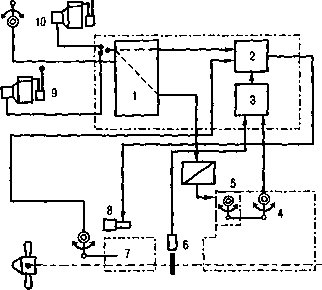
Рис. 107. Схема управления дизелем с ВРШ: 1 - комбинатор; 2 - регулятор шага; 3 регулятор нагрузки; 4 - датчик рейки топливных насосов; 5 - всережимный регулятор дизеля; 6 - датчик частоты вращения; 7, 8 - элементы МИШ; 9,10 - рукоятка управления ЦПУ и на ходовом мостике
В случае применения ВРШ датчик частоты вращения 6 посылает сигнал на регулятор нагрузки 3, и дальше на элементы МИШ 2, 8, 7, шаг винта уменьшается и частота вращения стабилизируется [2].
Объяснение механизма автоматического регулирования ВРШ в этом случае производится с помощью анализа системы дифференциальных уравнений.