Тема 1.2. Плоска система збіжних сил.
План лекції
Збіжні сили. Плоска система збіжних сил.
Додавання двох сил. Рівнодіюча.
Силовий багатокутник.
Геометрична умова рівноваги системи збіжних сил.
Теорема про рівновагу трьох не паралельних сил.
Проекція сили на вісь.
Аналітична умова рівноваги ПСЗС.
Раціональний вибір системи координат.
Збіжні сили. Плоска система збіжних сил
Збіжними називаються сили, лінії дії яких перетинаються в одній точці.
Припустимо, що на тіло діє плоска система з 4 сил, лінії дії яких перетинаються в точці О. Оскільки сила - це вектор, який можна переносити по його лінії дії, тому всі сили із точок їхнього додавання перенесемо в точку О. Ми замінили систему збіжних сил, прикладених до різних точок тіла, еквівалентною системою сил, прикладених до однієї точки.
Плоска система збіжних сил (ПСЗС) - така система, у якої всі лінії дії сил лежать в одній площині й сходяться в одній точці.
2. Додавання двох сил. Рівнодіюча
Найпростішу ПСЗС утворюють дві сили, що додані в одній точці. Рівнодіюча двох сил, прикладених до точки, може бути знайдена по аксіомі 4 статики побудовою паралелограма сил.
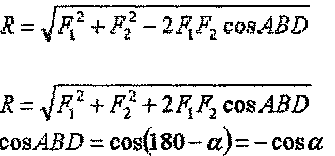
На заданих силах будуємо паралелограм АВСD - діагональ А D зображує шукану рівнодіючу R.
Чисельне значення R визначається із трикутника АDВ, застосувавши теорему косинусів.
Побудовою паралелограма або трикутника сил може бути вирішене й зворотне завдання - розкладання даної сили на дві.
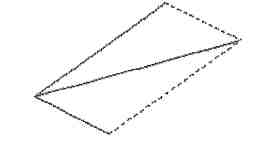
3. Силовий багатокутник
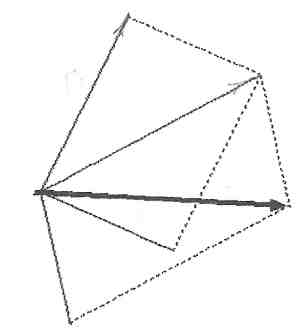 Якщо
в точці сходяться не дві, а кілька сил,
то їх рівнодіюча R
визначається за правилом силового
багатокутника (з кінця першої сили
відкладають по величині й напрямку
другу, з кінця другий - третю й т.д.).
Вектор,
що з'єднує початок першої сили й кінець
останньої тобто замикаючий силовий
багатокутник і спрямований назустріч
складаючим силам, визначає по величині
й напрямку рівнодіючу даних сил.
Якщо
в точці сходяться не дві, а кілька сил,
то їх рівнодіюча R
визначається за правилом силового
багатокутника (з кінця першої сили
відкладають по величині й напрямку
другу, з кінця другий - третю й т.д.).
Вектор,
що з'єднує початок першої сили й кінець
останньої тобто замикаючий силовий
багатокутник і спрямований назустріч
складаючим силам, визначає по величині
й напрямку рівнодіючу даних сил.
![]()
Рівнодіюча - замикаюча сторона силового багатокутника.
4. Геометрична умова рівноваги системи збіжних сил
Замкнутість - єдина необхідна й достатня геометрична умова рівноваги ПСЗС. Сили системи взаємно врівноважуються, якщо їх рівнодіюча дорівнює нулю (R =0), тобто якщо силовий багатокутник замкнути.
5. Теорема про рівновагу трьох не паралельних сил
Якщо на тіло діють три не паралельні сили, що лежать в одній площині, і вони перебувають у рівновазі, то лінії їхньої дії повинні проходити через одну точку й трикутник сил повинен бути замкнутим.
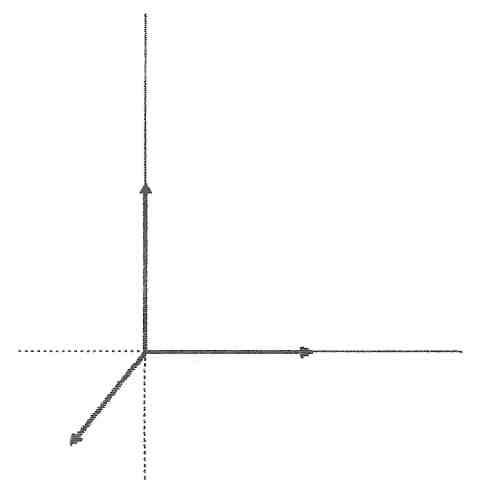
6. Проекція сили на вісь
Всі питання додавання, розкладання й рівноваги збіжних сил можуть бути вирішені аналітичним шляхом - проектування розглянутих сил на осі координат. Проекцією вектора на вісь називають добуток величини цього вектора на косинус кута між напрямком вектора й позитивним напрямком осі.
F F ˩ оси У » Fy = 0 Fx У F
Fx F - F если проекция силы направлена по оси к «-»
|

 У F ǁ оси Х » Fx
= + F
У F ǁ оси Х » Fx
= + F





 Fy
Fy х
х

 F под углом α
прилежащим к оси Х » Fх = F cos α
F под углом α
прилежащим к оси Х » Fх = F cos α




 y
F α F под углом
противолежащим к оси Х » Fу = F sin α
y
F α F под углом
противолежащим к оси Х » Fу = F sin α
 х
х


 y F ˩ оси Х » Fх
= 0
y F ˩ оси Х » Fх
= 0 Fx x F ǁ оси У » Fу
= - F
Fx x F ǁ оси У » Fу
= - F



 Fy + F если
проекция силы направлена по оси к «+»
Fy + F если
проекция силы направлена по оси к «+»

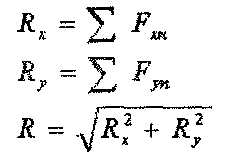
Проекція замикаючої сторони багатокутника на яку-небудь вісь дорівнює алгебраїчній сумі проекцій сторін цього багатокутника на ту ж вісь.
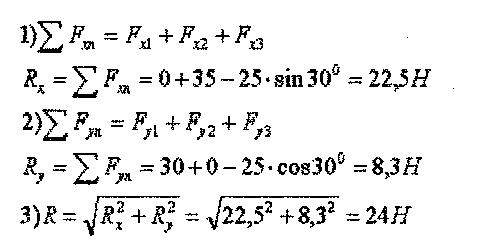
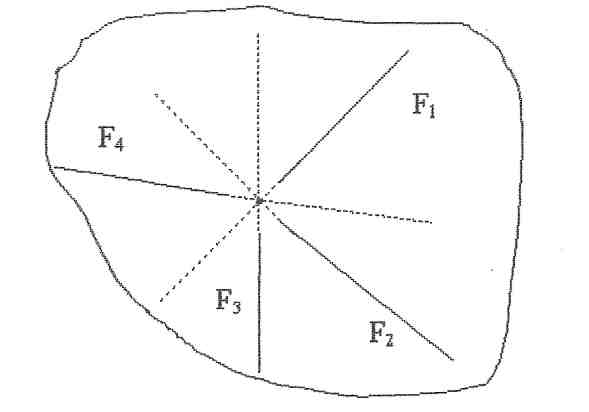
Завдання: визначити рівнодіючу даних сил.