

1.6.4. Диференціювання сигналу
Операцію диференціювання сигналу можна також здійснити за допомогою його фільтрації.
Звернемося до
виразу 1.5 та продиференціюємо по
![]() ліву і праву частину. Маємо
ліву і праву частину. Маємо
![]() ,
(1.37)
,
(1.37)
Цей вираз фактично
задає алгоритм необхідної фільтрації.
Спочатку отримуємо Фур’є-образ сигналу
![]() .
На наступному етапі пропускаємо цей
образ через фільтр з функцією пропускання
.
На наступному етапі пропускаємо цей
образ через фільтр з функцією пропускання
![]() ,
(1.38)
,
(1.38)
так званий, ЛЧМ-фільтр (фільтр з лінійно модульованою частотою).
Після цього здійснюємо обернене Фур’є перетворення та отримуємо похідну від сигналу.
На закінчення
проаналізуємо наслідки такої фільтрації
для сигналу заданого послідовністю
прямокутних імпульсів (цифрового
сигналу). На рисунку 1.25 наданий сам
сигнал та його похідна. Оскільки
геометричне тлумачення похідної є її
асоціація з тангенсом нахилу дотичної
до огинаючої сигналу, то цілком зрозуміло,
що на ділянці 1-2 похідна має нульове
значення. В точці 2 вона стрибком змінює
свою величину з нуля на
![]() .
Далі за точкою 2 похідна знову дорівнює
нулю. Тобто в околі точки 2 похідна
дорівнює дельта функції. Нарешті в точці
3 вона має величину
.
Далі за точкою 2 похідна знову дорівнює
нулю. Тобто в околі точки 2 похідна
дорівнює дельта функції. Нарешті в точці
3 вона має величину
![]() .
Або іншими словами в околі точки 3 похідна
– від’ємна дельта функція.
.
Або іншими словами в околі точки 3 похідна
– від’ємна дельта функція.
Таким чином, операція диференціювання, яку можна виконати за допомогою частотної фільтрації при застосуванні її до послідовності прямокутних імпульсів приводить до заміни цих імпульсів системою дуже коротких за часом сплесків, які виникають на початку та в кінці кожного прямокутного імпульсу.
1.7. Нейронні і нейроподібні мережі та їх оптична реалізація
1.7.1. Структура нейронних мереж
О
Рис. 1.25.
Пояснення до структури нейронної
мережі.
a – два шари НМ з кількістю елементів
b – схема функціонування елементу
НМ,
c – структура шарів НМ
d – можлива конфігурація шарів НМ
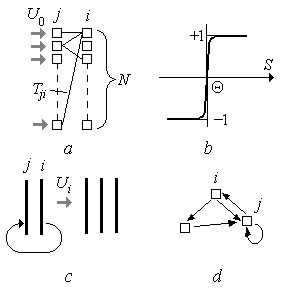
![]() в кожному шарі.
в кожному шарі.
![]() – вхідний сигнал,
– вхідний сигнал,![]() – зв’язок між елементами першого та
другого шарів НМ.
– зв’язок між елементами першого та
другого шарів НМ.
На рисунку 1.25,
a. зображена деяка структура (мережа),
яка складається з шарів
![]() та
та
![]() ,
які в свою чергу складаються з
елементів. Зауважимо що в загальному
випадку кількість елементів в кожному
шарі може бути різна. Нехай на таку
мережу поступає сигнал:
,
які в свою чергу складаються з
елементів. Зауважимо що в загальному
випадку кількість елементів в кожному
шарі може бути різна. Нехай на таку
мережу поступає сигнал:
![]() (1.39)
(1.39)
де
![]() – елементарний сигнал, що поступає на
-й
елемент 1-го шару.
– елементарний сигнал, що поступає на
-й
елемент 1-го шару.
Таку мережу будемо називати нейронною (або нейроподібною), якщо мережа має такі властивості:
1. В залежності від
величини вхідного сигналу
![]() вихідний сигнал (реакція) елемента
(нейрона) може приймати значення лише
+1 або –1 (див.
Рис.
1.25
b). В принципі вихідні сигнали (стани)
можуть бути і іншими, або з ними асоційовані
інші рівні вихідного сигналу, наприклад,
0 та 1. У будь-якому випадку елемент
спрацьовує як пороговий, тобто при
досягненні вхідного сигналу певного
значення
вихідний сигнал (реакція) елемента
(нейрона) може приймати значення лише
+1 або –1 (див.
Рис.
1.25
b). В принципі вихідні сигнали (стани)
можуть бути і іншими, або з ними асоційовані
інші рівні вихідного сигналу, наприклад,
0 та 1. У будь-якому випадку елемент
спрацьовує як пороговий, тобто при
досягненні вхідного сигналу певного
значення
![]() вихідний сигнал елемента стрибком
змінює своє значення.
вихідний сигнал елемента стрибком
змінює своє значення.
2. Вхідний сигнал на – му елементі 2-го шару визначається співвідношенням:
![]() (1.40)
(1.40)
де - визначає зв’язок між нейронами та першого та другого шарів НМ.
Тоді вихідний сигнал з -го нейрона можна представити як:
 , (1.41)
, (1.41)
де
![]() – умовне позначення стану елемента
після впливу на нього вхідного сигналу,
яке вказує, що існує певний час релаксації
нейрона,
– умовне позначення стану елемента
після впливу на нього вхідного сигналу,
яке вказує, що існує певний час релаксації
нейрона,
![]() – нелінійний оператор, якій забезпечує
стрибкоподібну зміну вихідного сигналу,
– порогове значення вхідного сигналу,
яке, за звичай, однакове для всіх нейронів.
– нелінійний оператор, якій забезпечує
стрибкоподібну зміну вихідного сигналу,
– порогове значення вхідного сигналу,
яке, за звичай, однакове для всіх нейронів.
Виходячи з виразу (1.41) та рисунку 1.25, а технічну модель нейрона можна уявити собі як певний пристрій, якій містить:
суматор, який об’єднує сигнали, що надходять з попереднього шару;
нелінійний оператор;
розподілювач, якій через міжз’єднання передає результат обробки, або на наступний шар, або на вихід системи.
Зауважимо, що в принципі можливий варіант, коли вихідний сигнал з виходу -го шару знову ж подається на вхід -го тобто утворюється ланка позитивного або негативного оберненого зв’язку (рис. 1.25 с). При цьому шари мережі виділяються досить умовно. Насправді, таке розбиття НМ на шари не завжди можливе, оскільки зв’язки між нейронами можуть мати випадковий характер і відповідно „архітектура” НМ має вигляд подібний до зображеної на рис. 1.25 d.