

6.6. Інструментальні засоби лазерної локації
6.6.1. Способи отримання лазерно-локаційних зображень. Основні принципи роботи типового аерознімального лідара
На рисунку 6.11 надана схема первинного лазерно-локаційного вимірювання.
Авіаційний лазерний локатор (лідар) являє собою активний засіб дистанційного зондування, який використовується для знімання (отримання лазерно-локаційних зображень) земної поверхні. Методика знімання, що реалізується лазерним локатором, полягає в наступному.
Активним елементом є напівпровідниковий лазер, який працює в імпульсному режимі з робочою довжиною хвилі в ближньому інфрачервоному діапазоні спектра. Лазер випромінює короткі імпульси, напрямок розповсюдження яких регулюється оптичною системою і зокрема скануючим елементом, що входить до її складу. Режим сканування вибирається таким чином, щоби покрити деяку наперед задану смугу сканування. У більшості випадків поперечна розгортка утворюється за рахунок використання дзеркала, яке качається за певним алгоритмом, повздовжня – за рахунок руху носія вздовж аерознімального маршруту.

Рис. 6.11. Схема первинного лазерно-локаційного вимірювання.
1 – привід сканую чого елемента, 2 – скануючий елемент, 3 – гіроскопічна система, 4 – “центр координат носія, відносно якого вимірюються його координати відносно земної поверхні.
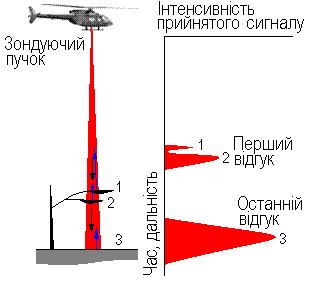
Рис. 6.12
Зондуючі імпульси розповсюджуються по прямолінійній траєкторії від джерела в бік сцени знімання. Якщо в процесі розповсюдження зондуючий імпульс стикається з перешкодою (поверхня Землі або наземний об’єкт), то місті зустрічі лазерний пучок перевідбивається. Характер перевідбивання у в більшості випадків дифузний, в результаті чого певна доля перевідбитої енергії імпульсу повертається у бік локатора, де і реєструється приймачем випромінювання, який також входить до складу оптико-електронного блока (ОЕБ) локатора. Моменти часу, які відповідають випромінювання зондуючого імпульсу, а також реєстрації відбитого імпульсу приймачем реєструються з високою точністю за допомогою пристрою Time Interval Meter (TIM), що також входить до складу оптико-електронного блока. Це дозволяє визначити часовий інтервал, який витрачається зондиуючим імпульсом на розповсюдження від джерела і назад, що, в свою чергу, беручи до уваги прямолінійність розповсюдження лазерного пучка і сталості швидкості розповсюдження електромагнітних коливань, дозволяє виміряти дальність D від джерела до об’єкта, що викликав відбивання. Треба відзначити, що в кожному сеансі вимірювання можуть реєструватися відбивання більш ніж від одного об’єкта (рис. 6.12). З приведеного вище опису стає зрозумілим, що лазерний локатор багато в чому реалізує схему скануючого лазерного далекоміра.
Всі
первинні вимірювання координат
виконуються лазерним локатором в
геоцентричній системі координат
![]() .
Траєкторія руху носія визначається за
рахунок встановленого на борту GPS
приймача, а його орієнтація в системі
координат (СК)
– за рахунок використання інерціальної
системи (гіроскопічного датчика) Inertial
Measurement Unit (IMU). Таким чином, для кожного
вимірювання, яке виконується лазерним
локатором, визначені просторові
координати положення GPS антени
.
Траєкторія руху носія визначається за
рахунок встановленого на борту GPS
приймача, а його орієнтація в системі
координат (СК)
– за рахунок використання інерціальної
системи (гіроскопічного датчика) Inertial
Measurement Unit (IMU). Таким чином, для кожного
вимірювання, яке виконується лазерним
локатором, визначені просторові
координати положення GPS антени
![]() і кути орієнтації сенсора IMU крену
і кути орієнтації сенсора IMU крену
![]() ,
тангажу
,
рискання
.
,
тангажу
,
рискання
.
Взаємне
розташування точки сканування (центра
скануючого дзеркала) і фазового центра
GPS антени, визначається вектором
![]() та вимірюється до початку аерознімальних
робот. Величина цього вектора стала на
протязі всього часу виконання знімання.
Ця обставина дозволяє в кожний момент
часу перейти від координат
до координат СК
та вимірюється до початку аерознімальних
робот. Величина цього вектора стала на
протязі всього часу виконання знімання.
Ця обставина дозволяє в кожний момент
часу перейти від координат
до координат СК
![]() точки сканування. Положення в геоцентричній
СК зондуючого пучка однозначно
визначається як координатами точки
сканування
і значеннями кутів
точки сканування. Положення в геоцентричній
СК зондуючого пучка однозначно
визначається як координатами точки
сканування
і значеннями кутів
![]() ,
так і величиною аргументу сканування
,
числено рівному куту відхилення напрямку
розповсюдження зондиуючого пучка від
вертикалі в локальній СК сканерного
блока
,
так і величиною аргументу сканування
,
числено рівному куту відхилення напрямку
розповсюдження зондиуючого пучка від
вертикалі в локальній СК сканерного
блока
![]() .
Тоді наявність інформації про нахилену
дальність
дозволяє перейти до геоцентричним
координат точки відбивання
.
Тоді наявність інформації про нахилену
дальність
дозволяє перейти до геоцентричним
координат точки відбивання
![]() .
Отримані таким чином координати
лазерної точки є основним результатом
роботи лазерного локатора.
.
Отримані таким чином координати
лазерної точки є основним результатом
роботи лазерного локатора.
Отже у функціональній схемі типового лазерного локатора, можна виділити три головних структурних компоненти, взаємодія яких складає суть функціонування ЛЛ:
1. Сканерний блок, до функцій якого входять генерація лазерних імпульсів, приймання відбитого сигналу і визначення нахиленої дальності до точки відбивання. Окрім цього, до функцій сканерного блока відноситься керування розгорткою;
2. Бортовий навігаційний комплекс (БНК), робота якого базується на взаємодії в реальному часі GPS-приймача і інерціальної системи IMU. Основною функцією бортового навігаційного комплексу є забезпечення кожного первинного лазерно-локаційного вимірювання повним набором елементів зовнішнього орієнтування, які дозволяють, використовуючи виміряне значення нахиленої дальності , перейти до геодезичних координат наземної точки, в якій відбулося відбивання зондуючого пучка;
3. Мережа наземних базових GPS-станцій, які поставляють дані для проведення диференціальної корекції траєкторних даних бортового GPS-приймача. Передбачається, що кожна GPS базова станція забезпечена реальними WGS-84 координатами. В певних випадках, при невеликих розмірах території знімання, може використовуватися одна базова GPS-станція.