

3.2 Модель манипулятора робота
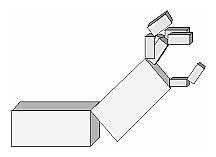
Манипулятор робота на экране изображается в виде нескольких каркасных параллелепипедов (по одному для каждого сегмента манипулятора – "плечо", "локоть", "кисть", "пальцы"). Предполагается, что в местах соединения сегментов расположены шарниры и сегменты могут вращаться вокруг них. На рис. 2.2 и рис. 2.3 показаны манипуляторы с разным количеством сегментов.
|
|
Рис. 2.2. Двухсегментный манипулятор. |
Рис. 2.3. Манипулятор из 10 сегментов (плечо, локоть и 4 пальца). |

Перед рисованием каждого сегмента надо выполнить модельное преобразование, обеспечивающее корректную ориентацию сегмента. При рисовании параллелепипеда его центр располагается в начале модельной системы координат, поэтому предварительно надо сместить модельную систему координат на половину длины сегмента. Если этого не сделать, то сегмент будет вращаться вокруг своего центра, а не вокруг шарнира.
После вызова glTranslated(), который задает положение шарнира, надо вызвать glRotated() для поворота сегмента. После этого надо выполнить перенос в обратном направлении для правильного позиционирования центра сегмента. В целом, для рисования одного сегмента надо вызвать следующие функции:
glTranslatef( -1.0, 0.0, 0.0 );
glRotatef( (float)shoulder_angle, 0.0, 0.0, 1.0 );
glTranslatef( 1.0, 0.0, 0.0 );
auxWireBox( 2.0, 0.4, 1.0 );
Для рисования второго сегмента надо переместить модельную систему координат в позицию второго шарнира. Т.к. координатная система уже была повернута, то ось X направлена в направлении первого сегмента. Следовательно, для переноса модельной системы координат в точку второго шарнира надо произвести перенос вдоль оси X. После этого можно нарисовать второй сегмент (функциями, аналогичными использованным для рисования первого сегмента):
glTranslatef( 1.0, 0.0, 0.0 );
glRotatef( (float)elbow_angle, 0.0, 0.0, 1.0 );
glTranslatef( 1.0, 0.0, 0.0 );
auxWireBox( 2.0, 0.4, 1.0 );
Описанную процедуру можно продолжать повторять, чтобы нарисовать все сегменты манипулятора (плечо, локоть, кисть, пальцы). Рисование двух сегментов манипулятора с двумя степенями свободы показано в программе 2.3. Поворот сегментов осуществляется с помощью клавиш курсора.
#include <windows.h>
#include <GL/gl.h>
#include <GL/glu.h>
#include <GL/glaux.h>
void CALLBACK resize( int width, int height );
void CALLBACK display();
void CALLBACK elbowAdd();
void CALLBACK elbowSubtract();
void CALLBACK shoulderSubtract();
void CALLBACK shoulderAdd();
// Текущие углы поворота плеча и локтя
int shoulder = 0, elbow = 0;
void main()
{
// Создание экранного окна
auxInitDisplayMode( AUX_RGBA | AUX_DEPTH | AUX_DOUBLE );
auxInitPosition( 50, 10, 400, 400);
auxInitWindow( "Лекция 2, Программа 2.3" );
// Включение ряда параметров OpenGL
glEnable( GL_ALPHA_TEST );
glEnable( GL_DEPTH_TEST );
glEnable( GL_COLOR_MATERIAL );
glEnable( GL_BLEND );
glBlendFunc( GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA );
glEnable( GL_LIGHTING );
// Включение максимального рассеянного освещения
float ambient[4] = { 1.0, 1.0, 1.0, 1 };
glLightModelfv( GL_LIGHT_MODEL_AMBIENT, ambient );
// Регистрация обработчиков событий
auxReshapeFunc( resize );
auxKeyFunc( AUX_LEFT, shoulderSubtract );
auxKeyFunc( AUX_RIGHT, shoulderAdd );
auxKeyFunc( AUX_UP, elbowAdd );
auxKeyFunc( AUX_DOWN, elbowSubtract );
// Вход в главный цикл GLAUX
auxMainLoop( display );
}
void CALLBACK resize( int width, int height )
{
glViewport( 0, 0, width, height );
glMatrixMode( GL_PROJECTION );
glLoadIdentity();
gluPerspective( 60.0, (float)width/(float)height, 1.0, 20.0 );
gluLookAt( 0,0,10, 0,0,0, 0,1,0 );
glMatrixMode( GL_MODELVIEW );
glLoadIdentity();
}
void CALLBACK display()
{
// Очистка буфера кадра
glClear( GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT );
glColor3f( 1.0, 1.0, 1.0 );
glPushMatrix();
glTranslatef( -1.0, 0.0, 0.0 );
glRotatef( (float)shoulder, 0.0, 0.0, 1.0 );
glTranslatef( 1.0, 0.0, 0.0 );
auxWireBox( 2.0, 0.4, 1.0 ); // плечо
glTranslatef( 1.0, 0.0, 0.0 );
glRotatef( (float)elbow, 0.0, 0.0, 1.0 );
glTranslatef( 1.0, 0.0, 0.0 );
auxWireBox( 2.0, 0.4, 1.0 ); // локоть
glPopMatrix();
// Копирование содержимого буфера кадра на экран
glFlush();
auxSwapBuffers();
}
void CALLBACK elbowAdd()
{
elbow = (elbow + 5) % 360;
}
void CALLBACK elbowSubtract()
{
elbow = (elbow - 5) % 360;
}
void CALLBACK shoulderAdd()
{
shoulder = (shoulder + 5) % 360;
}
void CALLBACK shoulderSubtract()
{
shoulder = (shoulder - 5) % 360;
}
Программа 2.3. Модель манипулятора робота.