

9. Функции асутп: контроль и отображение. Локальный и централизованный КиО. Особенности реализации, основные технические и программные элементы человеко-машинного интерфейса.
Функции КиО используются для создания человеко-машинных интерфейсов.
Локальный контроль – для выполнения задач, в непосредственной близости от тех объекта (в зоне видимости). Текстовые, графические панели, панели операторов.
можно запрограммировать:
- вывод рабочих сообщений
- вывод сообщений о неполадках
- вывод рецептов – совокупности технологических параметров
Централизованный контроль – реализуется на втором уровне АСУ ТП, для операторов-технологов, удаленном диспетчерском пункте. Для организации таких станций используются SCADA-пакеты.
SCADA-пакет – позволяет проектировать и сопровождать процесс выполнения системы КиО. Состоит из проектирующей и исполнительной части.
- обмен данными с устройствами низкого уровня
- накопление информации с помощью БД
- графические мнемосхемы ТП
- сообщения о событиях
- формирование отчетов
- внедрение собственных функций
10. Функции асутп: коммуникация. Виды коммуникаций. Свойства сети, влияющие на организацию связи в асу тп.
Коммуникация предназначена для обеспечения связи упр-х устройств с системами отображения, периферийными устройствами и т.д.
- локальная
- удаленная
- сетевая
Локальная – набор программных и аппаратных средств, для подключения к УУ других устройств в непосредственной близости.
Особенность: небольшой набор устройств, удаленность 2-3 м, соединение точка-точка, простейшие интерфейсы, невысокая стоимсть.
Удаленная – обеспечивает связь между центральными и периферийными устройствами (датчики, исполнительные устройства) до десятков метров. Токовая петля. Ограниченное число периф устройств (до 32).
Сетевая – для подключения УУ в состав распределенной системы управления. Для обмена данными между разными средствами, иногда на значительном расстоянии. Обмен небольшими массивами информации (макс 128 байт), возможно расставлять приоритеты, все в режиме реального времени.
11. Функции АСУТП: противоаварийная защита. Назначение особенности функционирования, требования. Разновидности систем ПАЗ. Дублирование контроллеров, периферийных устройств, датчиков и исполнительных элементов.
Дл наблюдения за граничными значениями ТП. Вырабатывает предупредительные сигналы, переводит исп устройства в состояние предотвращающее аварии. Непрерывный контроль. Отдельно от УУ.
Задачи ПАЗ:
1. Контроль за предельно допустимыми значениями. Измерение и сравнение с граничными
2. Оценка скорости изменения
3. Аварийная блокировка исп органов.
Требования:
1. Надежность системы ПАЗ
2. ПАЗ – дублированная система. Обычно комбинированное, также есть троированные системы паз. (H – одно активное устройство, F - два)
3. Быстродействие за счет режимов прерываний, которые имеют высший приоритет.
12. Системы управления децентрализованного типа. Конфигурация, основные достоинства, недостатки системы этого типа.
Децентрализованная система – используется в тех. процессах, в которых имеется большое количество технологического оборудования, а связи между ними могут изменяться.

13. Системы управления централизованного типа. Конфигурация, основные достоинства, недостатки системы этого типа.
Централизованная система – система, в которой все устройства и все функции, выполняемые этой системой, сосредоточены в одном узле и могут выполняться только до тех пор, пока центральный элемент находится в рабочем состоянии. Конструктивная централизация – все элементы объединены в одном корпусе.

Функциональные возможности системы определяются на этапе заказа путем выделения в каталоге или указания необходимых в последующем функций, на этапе параметрирования, путем активации различных программных параметров, блоков и схем.
Важным фактором централизованной системы является протяженность линий связи: соединительные каналы могут быть до нескольких сотен км - стоимость соединительных каналов будет составлять более 60 %. Может использоваться для объекта с небольшим количеством сигналов.
Существуют ограничения на использование централизованной системы:
- по количеству внешних сигналов;
- по быстродействию;
- по объему памяти;
- по количеству функций;
- по удаленности от ТП.
Недостатки: протяженность соединительных линий; низкая надежность; высокие цены; низкое быстродействие.
14. Функционально и пространственно распределенные системы, общие и отличительные характеристики по сравнению с централизованными. Конфигурации пространственно распределенных систем, достоинства и недостатки.
Функционально-распределенная система – система, в которой все технические средства построены по централизованному принципу (конструктивно располагаются в одном месте), а выполняемые системой функции распределены внутри устройства управления между автономными модулями. Каждый модуль имеет собственные средства для программирования и для выполнения задач, на которых специализируются данные модули.
Л П
– логический процессор
П
– логический процессор
ВП – вычислительный процессор
СП – спец. Процессор – спец. Функции
ПС – процессор связи
БП – Быстрый процессор – быстрые функции
КП – коммуникационный процессор
В данной системе ведущим устройством является логический процессор. Недостатком данной системы является большая протяжённость линий связи.
Пространственно распределенная система – система, которая предназначена для сокращения соединительных линий между местом расположения датчиков и используемых органов и местом расположения периферийных устройств. Это такая система, в которой все функции выполняются централизованно, а сбор информации или связь технологических процессов осуществляется при помощи удаленных периферийных устройств, расположенных в непосредственной близости от (точек сбора) датчиков и исполнительных механизмов.
У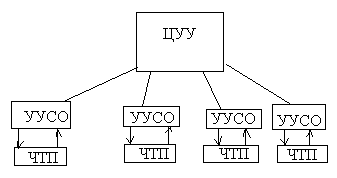 УСО
- удаленное УСО. Имеет только периферийные
модули ввода/вывода информации. Все
функции управления выполняются ЦУУ –
центр управления устройством.
УСО
- удаленное УСО. Имеет только периферийные
модули ввода/вывода информации. Все
функции управления выполняются ЦУУ –
центр управления устройством.