

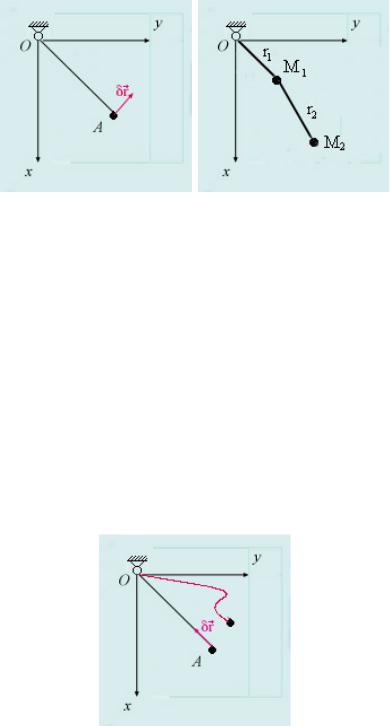
Рис. 84 Рис. 85 Точки на двух невесомых абсолютно твердых стержнях:
(x2 − x1)2 + (y2 − y1)2 = r22
x21 + y12 = r12
Кроме того, эти связи являются стационарными и голономными.
Определение. Если для некоторого возможного перемещения противоположное ему не является возможным, то связь называется неудерживающей (освобождающейся или односторонней). Удерживающие связи математически выражаются равенствами, а неудерживающие — неравенствами.
45.2Пример 2
Точка на нерастяжимой нити:
x2 + y2 + z2 ≤ r2
Рис. 86 Определение. Если в уравнение связи время не входит явно, то такая связь называется стацио-
нарной (склерономной):
f (xη, yη, zη) = 0.
здесь xη, yη, zη могут зависеть от t.
Определение. Если в уравнение связи время входит явно, то такая связь называется нестационарной (реономной):
f (xη, yη, zη, t) = 0
При стационарных связях действительное перемещение совпадает с одним из возможных перемещений. При нестационарной связи действительное перемещение может не совпадать ни с одним из возможных перемещений.
45.3Пример стационарной связи
Точка на поверхности
Рассмотрим точку (x, y, z) на поверхности:
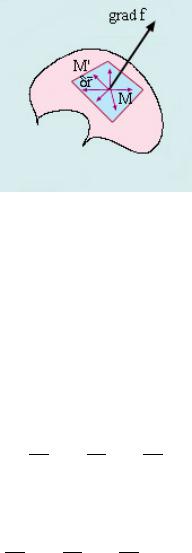
Рис. 87
f (x, y, z) = 0 |
(131) |
Пусть точка получила некоторое возможное перемещение:
M 0(x + δx, y + δy, z + δz).
Так как точка должна оставаться на поверхности, то приращения координат удовлетворяют равенству:
f (x + δx, y + δy, z + δz) = 0.
Разложим левую часть последнего уравнения в ряд Тейлора:
f (x, y, z) + ∂f∂x δx + ∂f∂y δy + ∂f∂z δz + ... = 0.
Здесь многоточием обозначены члены ряда, имеющие второй и более высокий порядок малости в сравнении с приращениями координат. С учетом выражения (131) получим:
∂f∂x δx + ∂f∂y δy + ∂f∂z δz = 0.
Так как возможным перемещением точки в данном случае является вектор δ~r, проекциями которого на оси координат являются δx, δy, δz, то последнее выражение можно переписать:
~ f · δ~r = 0. grad
~ f
Вектор grad направлен по нормали к рассматриваемой поверхности, а вектор возможного перемещения точки лежит в плоскости, касательной к поверхности в данной точке.
В случае стационарной связи действительное перемещение удовлетворяет уравнению:
df = ~ f · δ~r = 0. grad
А в случае нестационарной связи — уравнению: |
|
|
~ |
∂f |
|
df = grad f · δ~r + |
|
dt = 0 |
∂t |
||
Т.о., при стационарных связях действительное перемещение d~r совпадает с одним из возможных перемещений. При нестационарной связи действительное перемещение может не совпадать ни с одним из возможных перемещений.

45.4 Пример нестационарной связи
Точка на сфере переменного радиуса (нестационарная связь):
x2 + y2 + z2 = R2(t).
Определение. Связь называется геометрической, если в уравнение связи входят только координаты точек:
f (xη, yη, zη) = 0
Определение. Связь называется кинематической, если в уравнение связи входят координаты и скорости точек механической системы:
f (xη, yη, zη, vηx, vηy, vηz ) = 0
Определение. Связь называется голономной, если она выражается интегрируемым дифференциальным уравнением для координат и скоростей точек механической системы.
Замечание: Уравнение
f (xη, yη, zη, vηx, vηy , vηz , t) = 0 |
(132) |
называется интегрируемым, если существует функция F = F (xη, yη, zη, t), такая что уравнение (132) может быть записано в виде
dF
dt (xη, yη, zη, t) ≡ f (xη, yη, zη, vηx, vηy , vηz , t) = 0
Определение. Связь называется неголономной, если она выражается неинтегрируемым дифференциальным уравнением для координат и скоростей точек механической системы.
Определение. Связи, наложенные на механическую систему, называются идеальными, если сумма элементарных работ сил реакций этих связей на любом возможном перемещении равна нулю:
|
n |
|
|
|
|
X |
~ |
|
(133) |
|
η=1 |
Rη · δ~rη = 0 |
||
|
|
|
|
|
Здесь |
|
|
|
~ |
~ |
|
~ |
~ |
|
Rη = Rηxi + Rηyj + Rηz k |
||||
|
|
~ |
~ |
~ |
δ~rη = δrηxi + δrηyj + δrηz k
Согласно определению скалярного произведения двух векторов выражение (133) можно переписать
в виде:
Xn
(Rηxδxη + Rηyδyη + Rηz δzη) = 0
η=1
или
Xn ~
|Rη||δ~rη|cosαη = 0
η=1
где η — угол между векторами ~ η и η.
α R δ~r
Определение идеальных связей можно дать с использованием понятия мощности. Определение. Связи, наложенные на механическую систему, называются идеальными, если сум-
ма мощностей сил реакций этих связей равна нулю:
n |
|
|
|
|
X |
~ |
E |
= 0 |
(134) |
|
Rη · δ~rη |
|||
η=1
Согласно определению скалярного произведения двух векторов выражение (134) можно переписать в виде:
n |
|
|
|
|
X |
|
|
|
|
(RηxδrE |
+ RηyδrE |
+ Rηz δrE ) = 0 |
||
ηx |
|
|
ηy |
ηz |
η=1 |
|
|
|
|
или |
|
|
|
|
n |
|
|
|
|
X |
~ |
E |
| cos βη = 0 |
|
|Rη||δ~rη |
||||
η=1
46Принцип Даламбера-Лагранжа (общее уравнение динамики)
Для системы с идеальными связями в любой момент времени сумма элементарных работ активных сил и даламберовых сил инерции равняется нулю:
|
|
n |
|
n |
|
|
|
|
|
X |
~ |
X |
~ ин |
· δ~rη = 0 |
(135) |
|
|
η=1 |
Fη · δ~rη + |
η=1 |
Φη |
||
|
|
|
|
|
|
||
здесь |
|
|
|
|
|
|
|
~ |
— активная сила, приложенная к точке с массой mη |
|
|||||
Fη |
|
||||||
~ ин |
= mηw~η |
|
|
|
|
|
|
Φη |
|
|
|
|
|
|
|
Принцип Даламбера-Лагранжа можно сформулировать и с использованием понятия мощности:
n |
|
|
|
n |
|
|
|
|
X |
~ |
E |
+ |
X |
~ ин |
E |
= 0 |
(136) |
η=1 |
Fη · ~vη |
η=1 |
Φη |
· ~vη |
||||
|
|
|
|
|
|
|
||
Уравнения (135) и (136) называются общими уравнениями динамики
В случае равновесия механической системы ускорения всех точек системы равны нулю. Поэтому уравнения (135) и (136) принимают вид:
n |
|
|
|
|
|
X |
|
~ |
|
|
(137) |
η=1 |
Fη · δ~rη = 0 |
||||
|
|
|
|
|
|
n |
|
|
|
|
|
X |
~ |
E |
= 0 |
(138) |
|
|
|
F · ~vη |
|||
η=1
Уравнения (137) и (138) являются математическим выражение принципа возможных перемещений (возможных мощностей):
Для того, чтобы механическая система с идеальными (удерживающими) стационарными связями находилась в равновесии, необходимо и достаточно, чтобы сумма элементарных работ всех активных сил на любом возможном перемещении из предполагаемого состояния равновесия равнялась нулю.
47 Обобщенные координаты механической системы
Рассмотрим механическую систему из n точек, на которую наложены k удерживающих голономных связей. Тогда для 3n координат системы выполняются следующие условия:
f1(x1, y1, z1, x2, y2, z2, ..., xn, yn, zn, t) = 0,
f2(x1, y1, z1, x2, y2, z2, ..., xn, yn, zn, t) = 0,
...
fk(x1, y1, z1, x2, y2, z2, ..., xn, yn, zn, t) = 0.
Выберем первые k координаты и перенесем оставшиеся s = 3 · n − k в правые части уравнений. Далее разрешим полученные уравнения относительно первых k координат, а остальные s — переобозначим:
x1 = x1(q1, q2, ..., qs, t), y1 = y1(q1, q2, ..., qs, t), z1 = z1(q1, q2, ..., qs, t), x2 = x2(q1, q2, ..., qs, t),
...
...
xn = qs−2, yn = qs−1, zn = qs.
Таким образом, координаты всех точек системы будут функциями s независимых параметров системы и времени.
Определение. Независимые параметры, однозначно определяющие положение всех точек механической системы, называются обобщенными координатами этой системы. Число обобщенных координат является числом степеней свободы.
Систему можно записать в векторном виде:
~rη = rη(q1, q2, ..., qs, t); η = 1, 2, ..., n |
(139) |
Примеры:
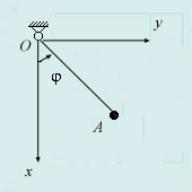
Пример 1: Плоский математический маятник:
Рис. 88
OA — невесомый абсолютно твердый стержень, O — цилиндрический шарнир. n = 1
Уравнения связей:
x2A + yA2 + zA2 = R2; zA = 0(k = 2) S = 3 · n − k = 1
Если за обобщенную координату выбрать, то имеем следующие уравнения:
xA = R cos ϕ; yA = R sin ϕ; zA = 0
Пример 1: Точка M на поверхности сферы: n = 1, k = 1.
Уравнение связи: x2 + y2 + z2 = R2
S = 3 · n − k = 2
Если за обобщенные координаты выбрать γ (широту) и ϕ (долготу), то имеем следующие уравнения:
xM = R cos ϕ cos γ; yM = R cos ϕ sin γ; zM = R sin γ |
|
Если закон изменения обобщенных координат известен |
|
q1 = q1(t); q2 = q2(t); ...; qs = qs(t), |
(140) |
то, подставив (140) в (139), можно найти траектории движения точек системы. |
|
Уравнения (140) определяют траекторию некоторой точки в s-мерном пространстве. Пространство q1, q2, ..., qs называется конфигурационным пространством механической системы. Изучение движения механической системы можно свести к нахождению траектории изображающей точки в конфигурационном пространстве.
Рассмотрим точку M 0, положение которой определяется как
M 0(q1 + δq1, q2 + δq2, ..., qs + δqs)
δq1, δq2, ..., δqs — вариации обобщенных координат Положению точки M 0 соответствует радиус-вектор
~rη0 = ~rη0 (q1 + δq1, q2 + δq2, ..., qs + δqs, t); η = 1, 2, ..., n
При перемещении изображающей точки в точку 0 (в конфигурационном пространстве) точка с массой mη механической системы совершает перемещение
δ~rη = ~rη0 − ~rη = ~rη0 (q1 + δq1, q2 + δq2, ..., qs + δqs, t) − ~rη (q1, q2, ..., qs, t) |
|
||||||||
Разложим это выражение в ряд Тейлора: |
|
|
|
|
|
|
|
|
|
δ~rη = ~rη(q1, q2, ..., qs, t) + |
∂~rη |
δq1 + |
∂~rη |
δq2 + ... + |
∂~rη |
δqs − ~rη(q1, q2, ..., qs |
, t), |
||
|
|
|
|||||||
∂q1 |
∂q2 |
∂qs |
|||||||
или |
|
X |
∂~rη |
|
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
s |
|
|
|
|
|
|
|
|
δ~rη = |
|
|
δqi |
|
|
(141) |
|
|
|
|
∂qi |
|
|
||||
|
|
|
i=1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
||
Выражение (141) устанавливает связь между возможными перемещениями точек механической системы и вариациями обобщенных координат.
Вычислим элементарную работу активных сил на возможном перемещении, определяемом выражением (141) :
n |
~ |
|
|
n |
~ |
s |
|
∂~rη |
|
s |
n ~ |
∂~rη |
|
||||
X |
|
|
|
X |
|
X |
|
|
|
X X |
|
|
|
|
|
||
δA = η=1 Fη · δ~rη = η=1 Fη · i=1 |
∂qi |
δqi = i=1 η=1 Fη · |
|
∂qi |
δqi |
|
|||||||||||
или |
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δA = |
X |
Qiδqi, |
|
|
|
|
|
(142) |
|||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
где |
n |
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
X |
~ |
∂~rη |
|
X |
|
∂xη |
|
∂yη |
|
∂yη |
|
|||||
Qi = |
|
Fη · |
|
= |
|
Fηx |
|
|
+ Fηy |
|
+ Fηy |
|
|
(143) |
|||
η=1 |
∂qi |
η=1 |
∂qi |
∂qi |
∂qi |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||