

Глава 1 машины и механизмы предприятий общественного питания и торговли
1.1. Общее устройство технологической машины
Механическое оборудование, используемое на предприятиях общественного питания, относится к классу технологических машин, т. е. машин, предназначенных для изменения свойств пищевого сырья при выработке кулинарной продукции. При этом продукты подвергаются силовому воздействию и в результате изменяют лишь некоторые из своих параметров (форму, размеры и др.), которые можно изменить механическим воздействием на продукт. Технологическая машина состоит из трех основных механизмов (двигательного, передаточного и исполнительного), а также механизмов управления, регулирования, защиты и блокировки. Механизм — это совокупность подвижно соединенных материальных тел или звеньев, совершающих под действием приложенных сил определенные целесообразные движения.
Двигательный механизм. В качестве двигательного механизма в технологической машине применяется в основном однофазный или трехфазный электродвигатель переменного тока с коротко-замкнутым ротором (асинхронный электродвигатель), реже — электродвигатель постоянного тока.
Передаточный механизм. Передаточный механизм технологической машины предназначен для передачи движения к рабочим органам исполнительного механизма, изменения скорости и направления вращения, а также для преобразования одного вида движения в другой. В качестве передаточных механизмов в технологических машинах применяют главным образом механизмы вращательного движения (передачи), реже — механизмы поступательного и качательного движения.
Основные виды передач: зубчатые (цилиндрическая, коническая, планетарная, червячная), ременные (плоскоременная, клиноре-менная), цепные (втулочная, втулочно-роликовая, зубчатая, пластинчатая и др.), фрикционные (цилиндрическая, коническая).
Зубчатые передачи (рис. 1.3) состоят из двух входящих в зацепление зубчатых колес. Для передачи вращательного движения между параллельными валами применяют цилиндрическую передачу (рис. 1.3, а —г), между пересекающимися— коническую (рис. 1.3, д, е), между перекрещивающимися — червячную (рис. 1.3, ж).
По форме и расположению зубьев колеса подразделяются на прямозубые (рис. 1.3, а), косозубые (рис. 1.3, б) и шевронные (рис. 1.3, в). Цилиндрическая и коническая передачи могут быть с внешним (рис. 1.3, а —в) или с внутренним (рис. 1.3, г) зацеплением колес.
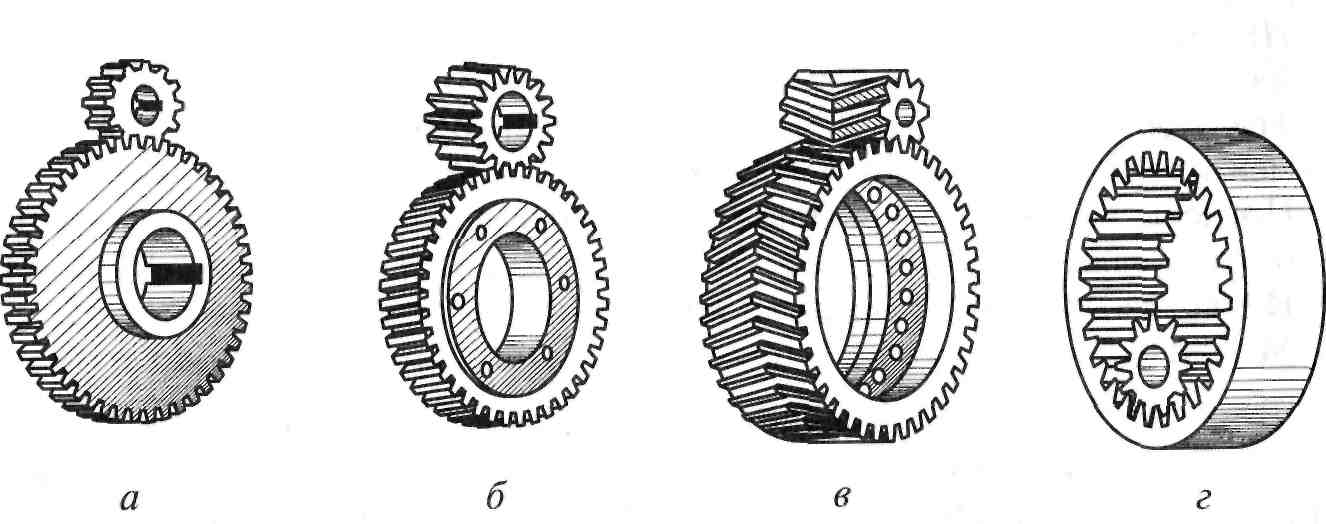
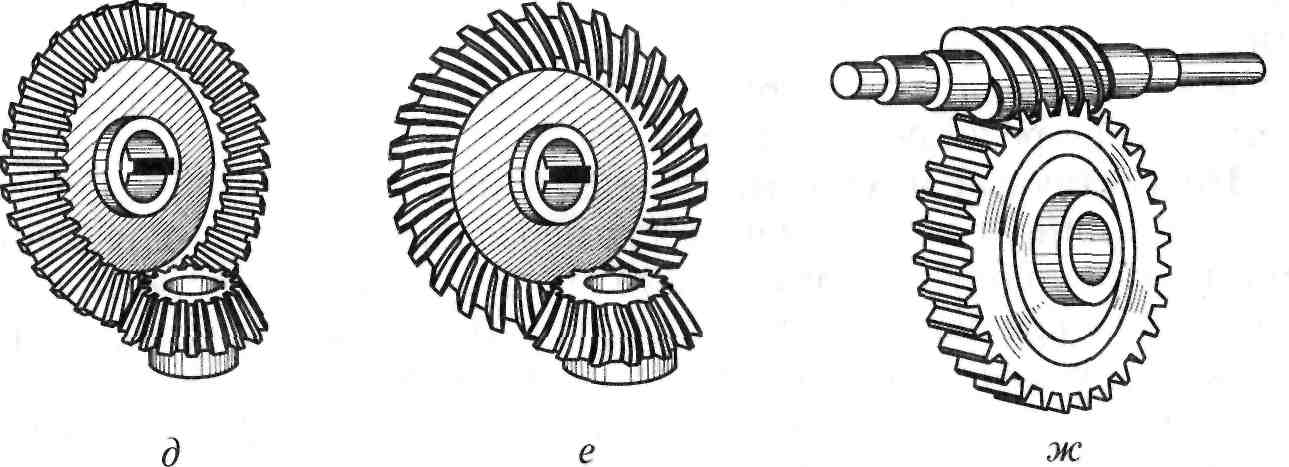
Рис. 1.3. Зубчатые передачи:
а — прямозубая с внешним зацеплением; б — косозубая с внешним зацеплением; в — шевронная с внешним зацеплением; г — прямозубая с внутренним зацеплением; д — коническая прямозубая; е — коническая косозубая; ж — червячная
Для передачи или создания сложного совмещенного вращательного движения используют планетарную передачу (рис. 1.4), которая может быть с внутренним (рис. 1.4, а, в) и внешним зацеплением (рис. 1.4, б, г). С помощью планетарной передачи можно получить на выходном ведомом валу одно (рис. 1.4, а, б) или два (рис. 1.4, в, г) вращательных движения. В планетарной зубчатой передаче одно из зубчатых колес делают неподвижным. Ведомое колесо (сателлит) совершает двойное совмещенное вращательное движение, вращаясь вокруг своей оси и вокруг оси неподвижного колеса. Водило, роль которого выполняет специальный рычаг или диск, соединяет оси неподвижного колеса и сателлита.
Простейшие планетарные передачи, состоящие из четырех звеньев (сателлит 2, водило 4, подвижное 1 и неподвижное 5 колеса), изображены на рис. 1.4, а, б. В одном из них (рис. 1.4, а) неподвижно большое колесо, в другом (рис. 1.4, б) — малое. В этих передачах ведущие валы совершают одно вращательное движение, а ведомые — два. Планетарную передачу без ведущего колеса рис. 1.4, в, г) используют для приведения в сложное вращательное движение рабочих инструментов, например взбивателей, которые крепят к сателлиту.
Червячная передача (см. рис. 1.3, ж), применяемая для передачи вращательного движения между скрещивающимися валами, состоит из червяка и червячного колеса и бывает с однозаходной и многозаходной винтовой нарезкой зубьев. Эта передача компактна, обеспечивает бесшумность и плавность работы, существенно снижает скорость вращения ведомого вала.
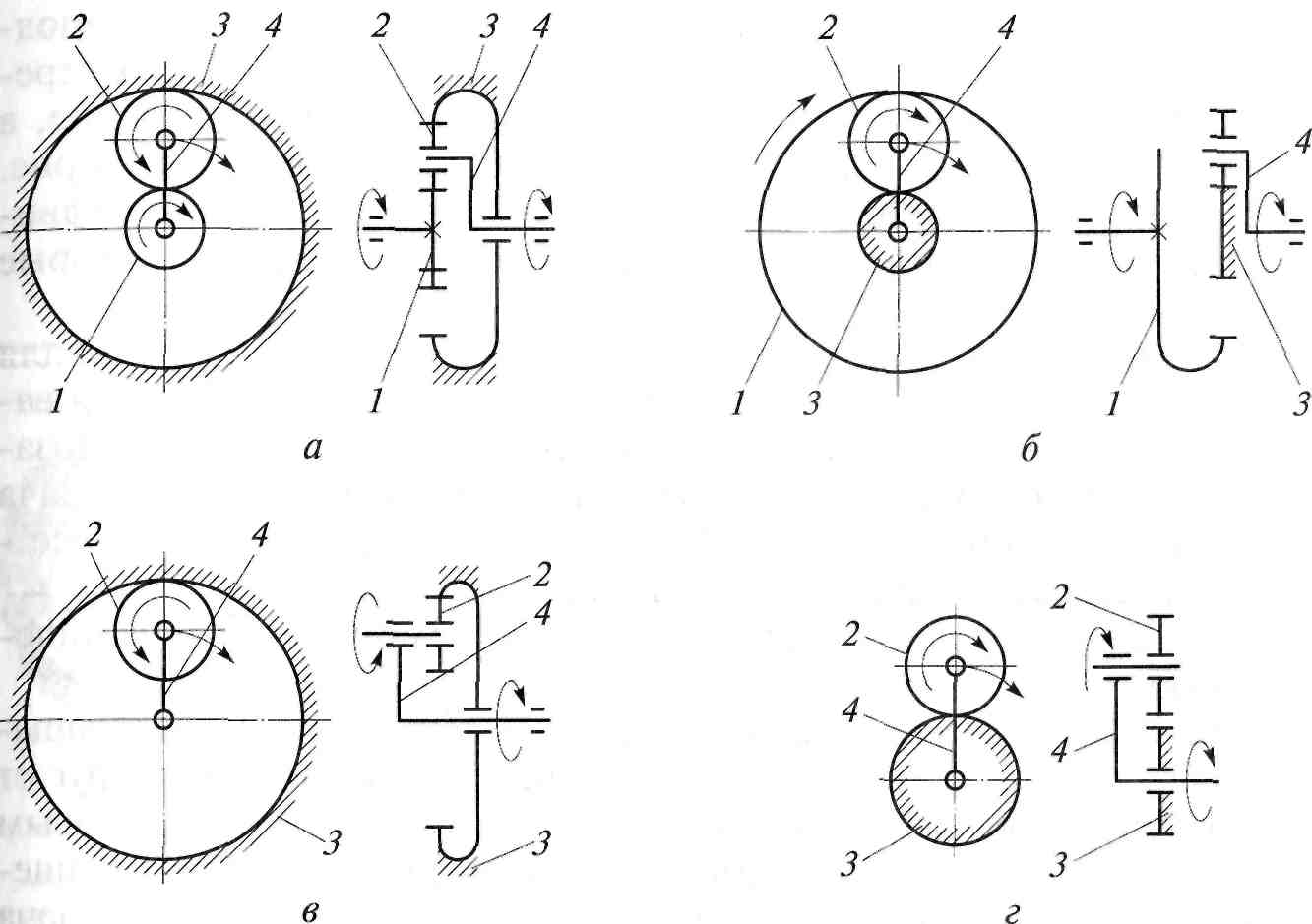
Рис. 1.4. Планетарные передачи:
а, в — с внутренним зацеплением сателлита с неподвижным колесом; б, г — с внешним зацеплением сателлита с неподвижным колесом; 1 — подвижное колесо; 2 — сателлит; 3 — неподвижное колесо; 4 — водило
Зубчатые передачи нашли широкое применение в механическом оборудовании предприятий общественного питания.
Ременные передачи (рис. 1.5) применяются для передачи вращательного движения между валами, значительно удаленными друг от друга. При этом валы могут быть параллельными с одинаковым (рис. 1.5, б) и противоположным (рис. 1.5, в) направлением вращения или скрещивающимися (рис. 1.5, г). Ременная передача состоит из двух шкивов, закрепленных на ведущем и ведомом валах, и ремня, надетого на эти шкивы. Передача вращательного движения обеспечивается силой трения между ремнем и шкивами.
По типу ремня передачи бывают плоскоременные (рис. 1.5, а— г), клиноременные (рис. 1.5, д) и кругл временные (рис. 1.5, е). При этом ремни имеют форму поперечного сечения в виде соответственно плоского прямоугольника, трапеции и круга.
Рис. 1.5. Ременные передачи: а—г — плоскоременные; д — клиноременная; е — круглоременная
Плоские ремни изготовляют из кожи, прорезиненной или пропитанной специальным составом хлопчатобумажной ткани, клиновые — из прорезиненного корда. Шкив состоит из обода и ступицы, соединенных спицами или дисками. Форма обода шкива зависит от формы применяемого ремня и может быть цилиндрической выпуклой или выполненной в виде желоба (трапецеидального либо кругового).
Для нормальной работы ременной передачи необходимо создать в ремне достаточное натяжение. Натяжение ремня регулируют изменением расстояния между шкивами или установкой натяжного ролика.
Ременные передачи просты в изготовлении, бесшумны в работе, имеют плавный ход, уменьшают опасность перегрузки двигателя (за счет пробуксовки ремня).
Недостатки ременных передач: значительные габаритные размеры, а также большая нагрузка на валы и оси.
В механическом оборудовании предприятий общественного питания клиноременные передачи широко применяются в картофелеочистительных, овощерезательных, взбивальных, тестораскаточных, тестомесильных и других машинах.
Цепная передача (рис. 1.6) применяется для передачи вращательного движения между параллельными, значительно удаленными друг от друга валами и состоит из двух звездочек, закрепленных на ведущем и ведомом валах, и шарнирной гибкой цепи, надетой на эти звездочки. При этом цепи бывают втулочно-роликовыми (рис. 1.6, б), зубчатыми (рис. 1.6, в) и пластинчатыми.
Цепная передача обеспечивает передачу движения одной цепью нескольких валов и позволяет передавать большую нагрузку. Недостатки цепной передачи: сложность в изготовлении, высокая стоимость, сложность в обслуживании, шум в процессе работы. На предприятиях общественного питания цепные передачи применяют в посудомоечных машинах для передачи движения конвейеру с посудой, а также в хлеборезках.
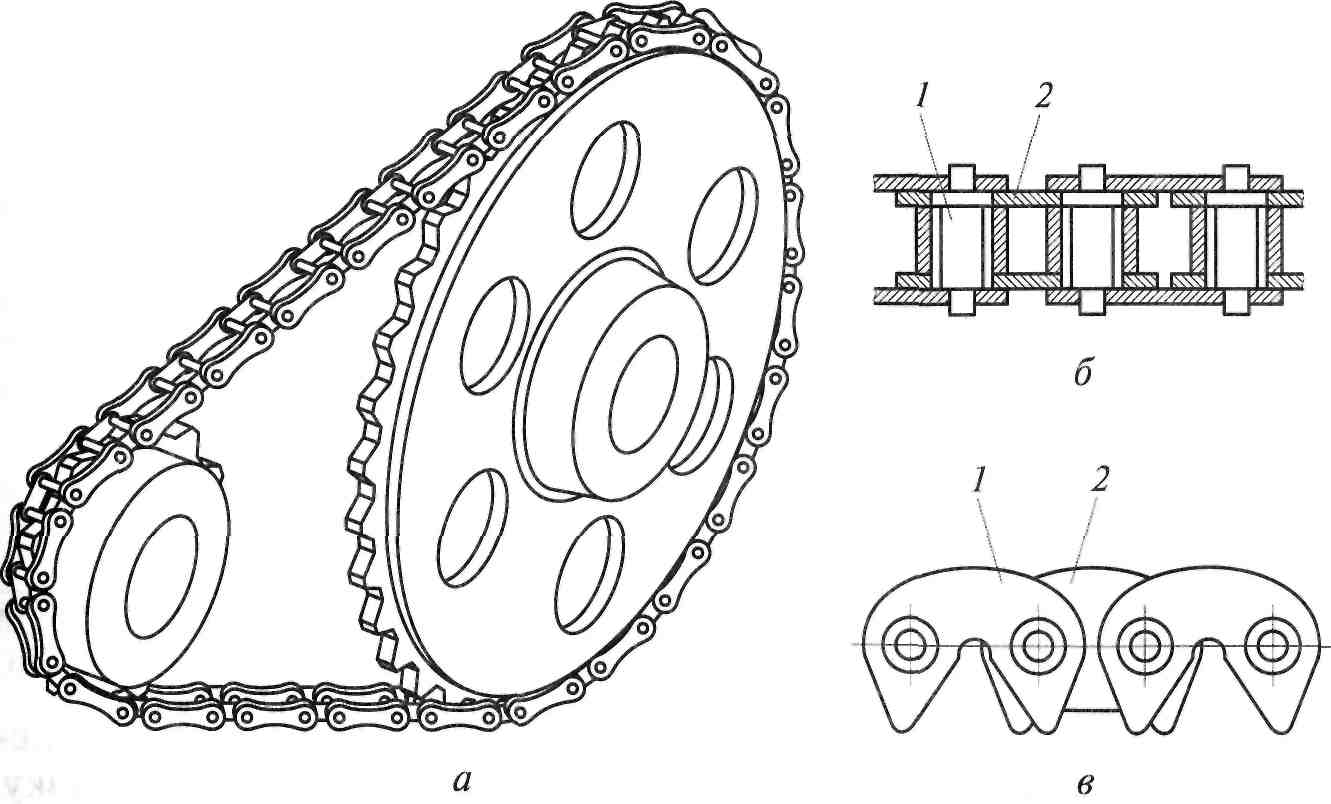
Рис. 1.6. Цепная передача:
а — общий вид; б — втулочно-роликовая цепь: 1 — ролик; 2 — втулка; в — зубчатая цепь: 1 — двузубая пластина; 2 — направляющая пластина
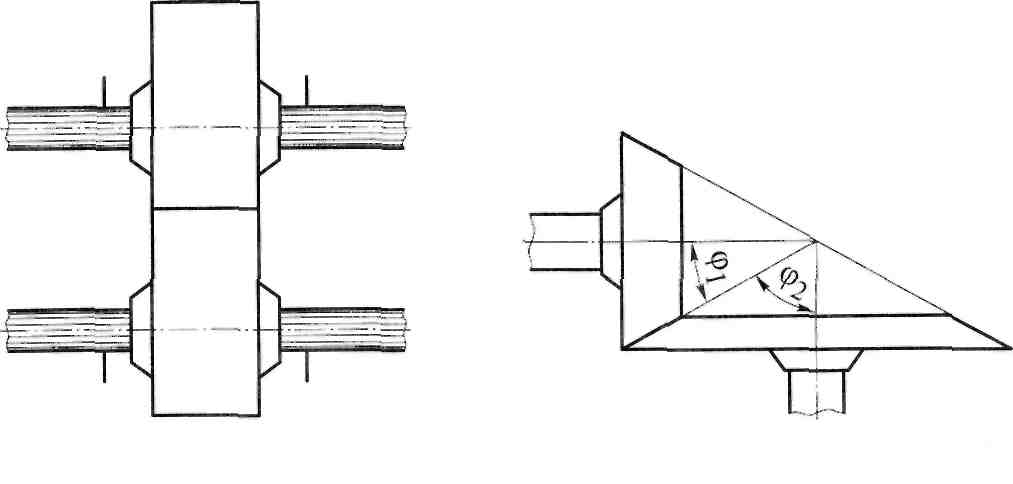
Фрикционные передачи (рис. 1.7) применяются для передачи движения между параллельными и пересекающимися валами и состоит из прижатых друг к другу цилиндрических (рис. 1.7, а) или конических (рис. 1.7, б) катков. От ведущего катка к ведомому движение передается под действием силы трения, возникающей в результате прижатия одного катка к другому. Цилиндрические катки используют для передачи движения между параллельными валами, а конические — между пересекающимися. Эта передача проста по конструкции, бесшумна, устойчива к перегрузкам.
 а б
а б
Рис. 1.7. Фрикционные передачи:
а — с цилиндрическими клатками; б — с коническими клатками;
Недостатки фрикционной передачи: быстрый износ катков, необходимость в подпружинивающих устройствах, непостоянство передаточного числа из-за проскальзывания катков. В механическом оборудовании предприятий общественного питания фрикционные передачи применяют редко.
Механизмы возвратно-поступательного движения. Для преобразования вращательного движения в возвратно-поступательное движение рабочего органа применяют кривошипно-шатунный и кривошипно-кулисный механизмы. Кривошипно-шатунный механизм (рис. 1.8, а) состоит из кривошипа (коленчатого вала) 1, шатуна 2 и ползуна 3. При вращении кривошипа шатун передает движение ползуну, который совершает возвратно-поступательное движение. Этот механизм используют в тестомесильных машинах, машине для резки замороженных продуктов, хлеборезках и др.
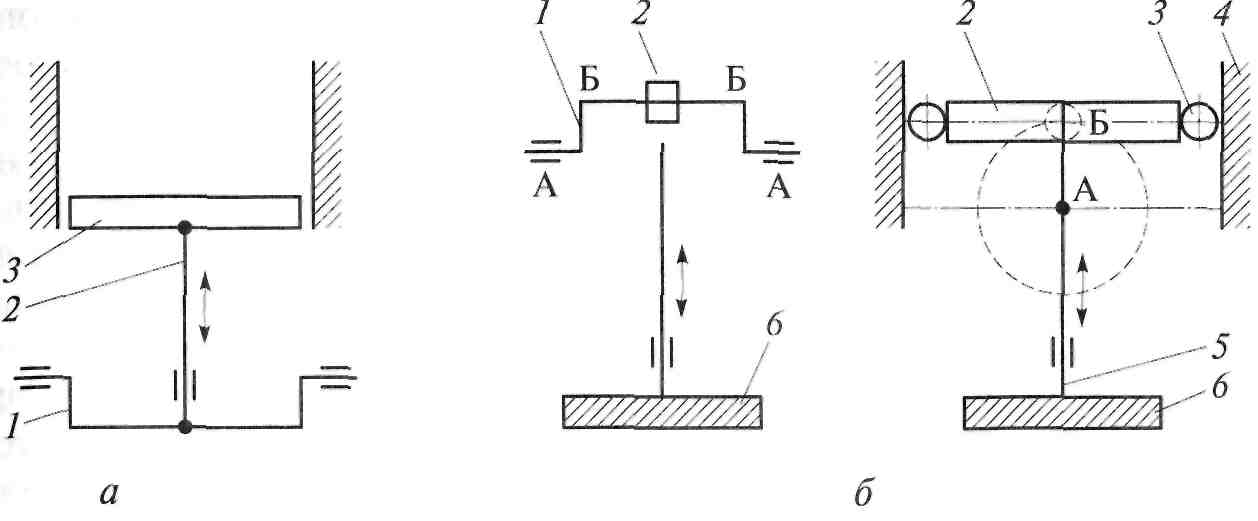
Рис. 1.8. Механизмы возвратно-поступательного движения:
а — кривошипно-шатунный: 1 — кривошип (коленчатый вал); 2 — шатун; 3 — ползун;
б — кривошипно-кулисный: 1 — кривошип; 2 — рамка; 3 — ролики; 4 — направляющая; 5 — рабочий вал; б — ползун (рабочий орган)
Кривошипно-кулисный механизм (рис. 1.8, б) состоит из кривошипа (коленчатого вала) 1, рамки 2 с роликами 3, двигающимися по направляющим 4, и ползуна (рабочего органа) 6 с рабочим валом 5.
Исполнительный механизм. В технологической машине исполнительный механизм выполняет непосредственно ту работу, для которой предназначена эта машина, и определяет ее класс. Поэтому в отличие от передаточных механизмов, конструкция которых состоит из деталей и узлов общего назначения и не зависит от функции машины, исполнительный механизм включает детали и узлы специального назначения. Конструкция исполнительного механизма зависит от вида и свойств обрабатываемых продуктов и осуществляемой технологической операции.
В общем случае исполнительный механизм (рис. 1.9) состоит из рабочей камеры, рабочих органов, приводного вала загрузочного и разгрузочного устройств и станины.
Рабочая камера 1 предназначена для удержания продукта, на который воздействуют рабочие органы, в удобном положении и снабжена загрузочным 4 и разгрузочным 5 устройствами для поступления на обработку продуктов и удаления их после обработки.
Рабочие органы 2 исполнительного механизма воздействуют непосредственно на обрабатываемые продукты и подразделяются на основные (ножи, сита, лопасти, шнеки, решетки, взбиватели и др.) и вспомогательные (зажимы, захваты, направляющие, опорные плоскости и др.).
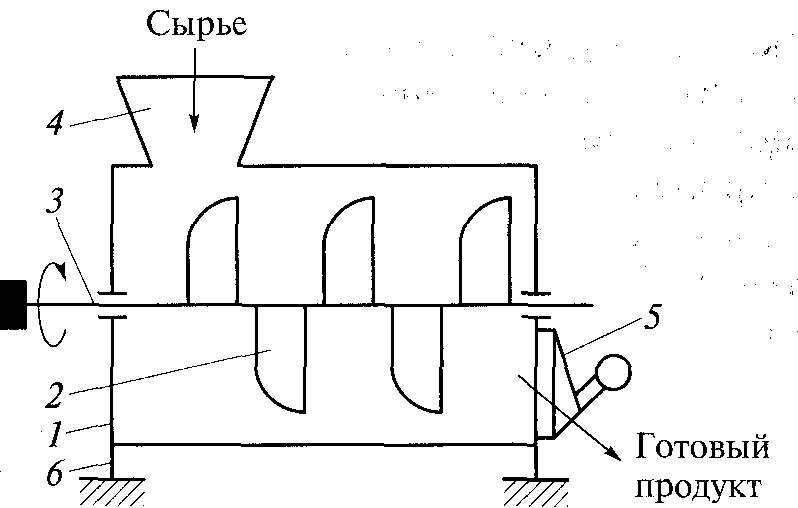
Рис. 1.9. Принципиальная схема исполнительного механизма:
1 - рабочая камера; 2 — рабочий орган; 3 — приводной вал; 4 — загрузочное устройство; 5 — разгрузочное устройство; 6 — станина
Движение рабочим органам и обрабатываемому продукту сообщается непосредственно от приводного вала 3 или через промежуточные звенья. Приводной вал получает соответствующее движение от двигательного и передаточного механизмов. Все перечисленные элементы объединены в один механизм с помощью станины 6. Станину закрепляют на фундаменте, полу, столе, платформе или присоединяют к станине передаточного и двигательного механизмов.