

-
Классификация действующих сил в механизмах.
Все силы, действующие в механизмах, условно подразделяются на:
-
внешние, действующие на исследуемую систему со стороны внешних систем и совершающие работу над системой. Эти силы в свою очередь подразделяются на:
-
движущие, работа которых положительна (увеличивает энергию системы);
-
сопротивления, работа которых отрицательна (уменьшает энергию системы).
-
силы полезного (технологического) сопротивления
-
силы трения (диссипативные)работа всегда отрицательна;
-
взаимодействия с потенциальными полями (позиционные)
-
внутренние, действующие между звеньями механической системы. Работа этих сил не изменяет энергии системы. В механических системах эти силы называются реакциями в КП.
-
расчетные (теоретические) - силы, которые не существуют в реальности, а только используются в различных расчетах с целью их упрощения:
-
силы инерции (метод кинетостатики).
-
приведенные (обобщенные) силы - силы. совершающие работу по обобщенной координате равную работе соответствующей реальной силы на эквивалентном перемещении точки ее приложения.
-
Построение теоретического и рабочего профиля кулачка.
При графическом построении профиля кулачка применяют метод обращения движения: всем звеньям механизма условно сообщают равную угловую скорость. При этом кулачок становится неподвижным, а остальные звенья вращаются с угловой скоростью, равной по величине, но противоположной по направлению угловой скорости кулачка.
При построении профиля кулачка из центра – точки О проводят окружность радиусом r0 и окружность радиусом e. Затем отмечают на окружности заданный рабочий угол кулачка и делят полученный сектор на части(их количество должно быть равно количеству отрезков разбиения на графике). К каждой точки разбиения проводим касательную от окружности с радиусом e; на каждой касательной откладывают соответствующее перемещение толкателя в масштабе и соединяют полученные точки плавной кривой. Таким образом, получают теоретический (центровой) профиль кулачка.
Для получения конструктивного (рабочего) профиля кулачка строят профиль, отстоящий от центрового на величину радиуса ролика. Он получается как огибающая к дугам, проведенным из произвольных точек центрового профиля радиусом ролика.
Радиус ролика выбирается соотношением: RB = (0.25-0.4)r0
В конце строим график зависимости угла давления от положения толкателя. Для этого в каждой точке теоретического профиля проводим нормаль и измеряем угол между этой нормалью и радиусом. Этот угол откладываем на оси ординат. Полученные точки соединяем плавной линией.
-
Приведение сил и масс.
О движении всех звеньев машины можно судить по движению одного звена, так как движение всех звеньев взаимосвязаны. Звено, по движению которого судят о характере работы машины, называется главным.
За главное звено обычно принимают ведущее звено, так как оно непосредственно связано с двигателем. Чтобы иметь право судить по движению главного звена о движении остальных звеньев, необходимо учесть силы и моменты, действующие на все звенья механизма, а также массы и моменты инерции всех звеньев. Для этого все силы и массы приводят к главному звену.
Приведенной силой (моментом) называется такая сила (момент) приложения к главному звену, которая развивает мощность равную сумме мощностей приводимых сил и моментов:

Если главное звено совершает поступательное движение, то удобно все силы и заменять эквивалентной по своему действию на механизм приведенной силой. Если главное звено вращается (что встречается гораздо чаще), то определяют приведенный момент.
Приведенной массой (моментом инерции) называется такая условная масса (момент инерции), обладая которой главное звено имеет кинетическую энергию, равную сумме кинетических энергий приводимых масс и моментов инерции:
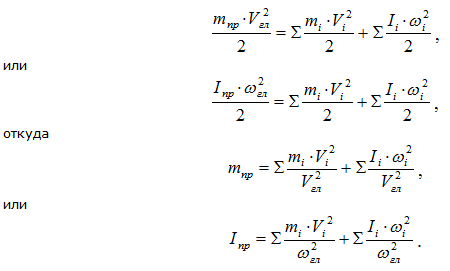
Здесь также удобно определять приведенную массу, если главное звено движется поступательно, и определять приведенный момент инерции, если главное звено совершает вращательное движение.
После приведения сил и масс к главному звену определяется его истинный закон движения.