

прочность самолета
.pdfростью. Поэтому крыло пройдёт положение равновесия по инерции. Скорость, направленная вниз, будет постепенно падать, ускорение в положении 5 будет направлено уже вверх, силы упругости и инерции сменят направление на противоположное. При отсутствии рассеивания энергии сечение займёт положение 6, являющееся зеркальным отображением положения 1. После этого начнётся движение сечения крыла вверх.
|
|
|
|
Рин |
|
1 |
|
а |
|
|
2 |
|
|
Руп |
|
|
|
|
Руп |
|
Рин |
3 |
|
|
|
а u |
|
||
|
|
|
|
||
|
|
|
Руп |
|
|
0 |
|
|
u |
|
4 |
F C G |
|
|
|
||
|
|
Руп |
|
|
|
|
F - фокус |
|
|
5 |
|
|
|
|
|
||
|
С - центр изгиба |
а |
u |
|
|
|
|
|
|||
|
G - центр масс |
|
|
||
|
|
|
Рин |
|
|
|
а - ускорение |
|
Руп |
|
|
|
|
|
|
||
|
u - скорость |
|
|
|
6 |
|
|
|
|
|
|
|
Рис. 9.5. Процесс возникновения изгибно-крутильных колебаний |
|
|||
|
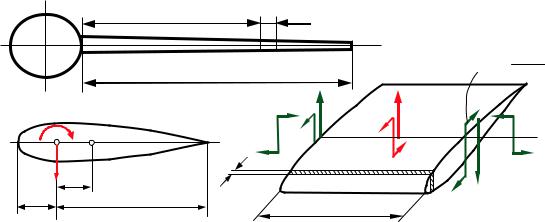
В итоге крыло будет совершать изгибно-крутильные колебания. В |
||||
реальности такие колебания такого |
быстро затухают из-за диссипации |
||||
(рассеивания) энергии импульса и отсутствия энергетической подкачки
извне. |
|
|
Yu |
|
|
|
|
Картина изменится, если |
а u |
Рин |
|
||||
колеблющееся крыло поместить |
|
|
3 |
||||
|
|
|
|
||||
в поток газа (рис. 9.6). С одной |
|
|
|
|
φ |
||
|
|
|
|
|
|||
стороны, из-за закручивания |
|
|
Р |
tg u /V |
|||
крыла на угол φ в фокусе крыла |
α |
|
|||||
|
|
уп |
|
||||
появится приращение подъемной |
V u |
Yφ |
|
|
|
||
силы Y . Это приводит к нарас- |
Рис. 9.6. Воздействие потока |
|
|||||
танию |
амплитуды колебаний |
газа на колеблющееся крыло |
|
||||
(сила |
Y будет возбуждающей). |
|
|
|
|
|
|
Y |
с |
у |
q S с V 2 |
S , |
(9.1) |
|
|
|
у |
2 |
|
|
|
|
|
|
|
|
|
|
то есть возбуждающая аэродинамическая сила пропорциональна V2.
111

С другой стороны, появление составляющей скорости u за счёт изгибных колебаний при движении вниз приведет к увеличению угла атаки на
величину Δα и в фокусе крыла появится приращение подъемной силы |
Yu. |
|||||||
Это вызовет уменьшение амплитуды колебаний (сила |
Yu будет демпфи- |
|||||||
рующей). |
|
|
|
|
|
|
|
|
Y |
с |
V 2 |
S с |
u |
V 2 |
S с u |
V S , |
(9.2) |
2 |
|
|||||||
u |
y |
y V |
2 |
y |
2 |
|
||
то есть демпфирующая аэродинамическая сила пропорциональна V.
При малых скоростях полёта (рис. 9.7) возбуждающие силы меньше демпфирующих и возникающие в этих условиях колебания несущей поверхности затухают. Картина изменится на противоположную, если скорость полета V превысит некоторую кри-
|
Y |
|
тическую скорость Vкр. В этом случае |
||
|
|
||||
|
Yu |
|
|
колебания |
с нарастающей амплитудой |
|
|
|
|||
|
|
|
неизбежно приведут к разрушению кон- |
||
|
Yφ |
|
|
струкции. |
Явление динамической не- |
|
|
|
устойчивости конструкции в потоке газа |
||
|
|
|
|
||
|
|
|
|
и называется флаттером, а критическая |
|
|
|
|
|
скорость флаттера – это скорость, при |
|
|
Vкр |
V |
которой теоретически возможны коле- |
||
Рис. 9.7. К определению Vкр |
бания конструкции с постоянной ампли- |
|
тудой. |
||
|
||
Возможны различные виды флаттера. Флаттер, рассмотренный вы- |
||
ше, называется изгибно-крутильным. Каждый вид флаттера характеризуется своей критической скоростью.
Рассмотрим, к примеру, действие изгибно-элеронного или изгибнорулевого флаттера. Изгибно-элеронным флаттером крыла называют такую форму колебаний, при которой совмещены изгиб крыла и отклонение элерона. Она наблюдается при высокой крутильной жесткости консоли, когда приращения углов закручивания сечений настолько малы, что ими пренебрегают в изложенной ниже модели этого процесса.
Будем считать, что на крыле расположен несбалансированный элерон, центр масс которого находится позади оси вращения (рис. 9.8). Для простоты предположим, что элерон аэродинамически полностью скомпенсирован, то есть его отклонение не вызывает появления шарнирного момента (центр давления лежит на оси вращения). Предположим также, что возможно произвольное отклонение элерона при неподвижной ("зажатой") ручке управления за счет упругих деформаций проводки управления и люфтов в ней.
112

|
|
|
|
|
Рин |
|
1 |
|
|
а |
|
|
2 |
|
|
|
Руп |
|
||
|
|
а u |
Рин |
3 |
||
у0 |
|
Руп |
|
|||
|
|
|
Y |
|
|
|
0 |
|
|
u |
|
|
4 |
|
|
|
|
|
||
F C |
F - фокус |
|
Y |
Руп |
|
|
|
|
|
|
|||
|
С - центр изгиба |
а |
u |
у1 |
Рин |
5 |
V >Vкр |
а - ускорение |
Y |
||||
u - скорость |
|
Руп |
|
|
||
у0 < у1 |
|
|
|
|
|
6 |
|
|
|
|
|
|
|
Рис. 9.8. Процесс возникновения изгибно-элеронного флаттера
Пусть, как и в случае изгибно-крутильного флаттера, крыло под действием возмущения изогнулось вверх (положение 1), а затем это возмущение исчезло, и крыло было предоставлено самому себе (положение 2). Под действием силы упругости Руп конструкция крыла начнет возвращаться к равновесному положению 0. Вследствие действия момента от силы инерции Рин на элероне его хвостик отклонится вверх (положение 3). Это, в свою очередь, вызовет появление приращения аэродинамической силы Y, приложенного в фокусе крыла и направленного вниз. Его величина будет пропорциональна углу отклонения элерона. Эта сила заставит сечение крыла пройти нейтральное положение 4 и отклониться вниз. Сила упругости будет препятствовать этому движению и тормозить его. При этом ускорение а, с которым движется сечение крыла, и сила инерции на элероне изменят направление действия на противоположное, что вызовет уменьшение угла отклонения элерона (положение 5), так что в крайнем нижнем положении 6 элерон окажется в нейтральном состоянии.
Затем под действием силы упругости сечение крыла начнет перемещаться вверх, а сила инерции одновременно будет отклонять хвостик элерона вниз. Появится приращение аэродинамической силы, направленное вверх, характер динамического процесса будет колебательным.
Как и в случае изгибно-крутильного флаттера, возбуждающей является аэродинамическая сила. Если скорость полета превысит некоторое критическое значение, то тогда возбуждающая аэродинамическая сила окажется больше демпфирующих сил и амплитуда колебаний начнёт воз-
растать, т.е. у0 < у1 (см. рис. 9.8). В итоге это неизбежно приведёт к разрушению конструкции.
113
В дополнение к изложенному выше колебательному процессу, при малой крутильной жесткости крыла (стабилизатора или киля) возможно проявление апериодического аэроупругого явления – реверса элеронов
(рулей) [17].
9.1. Уравнения свободных колебаний несущей поверхности
Составим дифференциальные и интегральные уравнения изгибнокрутильных колебаний свободнонесущего крыла [17]. Вырежем мысленно на колеблющемся крыле отсек длиной dz. (рис. 9.9). Отсек движется поступательно с линейным ускорением jп и закручивается относительно точки С (ц.и.) с угловым ускорением z = d z/dt.
|
|
z |
dz |
|
|
|
|
|
|
|
lк |
|
z |
M кр |
M кр |
dz |
|
|
|
|
|
z |
||||
|
|
|
|
|
|
|
||
εz |
|
|
Q |
dPин |
|
|
|
M |
|
|
Мх Мкр |
|
|
|
|||
C |
G |
|
|
|
M x |
zx dz |
||
dx |
|
dМин |
|
Q dz |
|
|
||
jп ro |
|
|
Q |
|
|
|||
|
|
|
|
|
||||
хнос |
|
ххв |
|
dz |
|
z |
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 9.9. Силы, действующие на отсек крыла |
|
|
|
|||
Ускорение в точке с координатой x равно j = jп –x·εz. Инерционная сила на участке dx·dz составляет
–m*(jп – x·εz)·dx·dz,
где m* – масса единицы площади крыла. Момент этой силы относительно точки С равен
–m*(jп – x·εz)·х·dx·dz.
Чтобы вычислить dРин и dМин, проинтегрируем два последних выражения вдоль хорды
|
хнос |
|
|
dРин |
|
m*( jп x z ) dx dz; |
|
|
ххв |
(9.3) |
|
|
|
хнос |
|
|
|
|
|
dМин |
m *( jп x z ) x dx dz. |
|
|
|
|
ххв |
|
114
хнос |
|
|
|
|
хнос |
|
Учитывая, что m *dx m – погонная масса крыла; |
m *хdx m r0 |
; |
||||
ххв |
|
|
|
|
ххв |
|
хнос |
|
|
|
|
|
|
r0 – расстояние между ц.и. и ц.м.; m*х2dx Jz..пог |
– погонный массовый мо- |
|||||
ххв |
|
|
|
|
|
|
мент инерции крыла относительно оси z; j |
2 y ; |
|
|
2 , из (9.3) получим |
|
|
п |
t2 |
z |
|
t2 |
|
|
|
|
m |
2 |
y dz r0 m |
|
2 |
dz; |
|||||||||||
dРин |
|
|
||||||||||||||||
|
|
t 2 |
|
|
|
|
|
|
t 2 |
|
|
|||||||
|
|
|
|
2 y |
|
|
|
|
|
|
|
2 |
|
|||||
dМ |
ин |
r m |
dz J |
z. пог |
dz. |
|||||||||||||
|
|
|
||||||||||||||||
|
0 |
|
t |
2 |
|
|
|
|
t |
2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Уравнения равновесия для отсека крыла имеют вид |
||||||||||||||||||
F |
y |
0 Q |
Q |
Q dP |
|
|
0; |
|||||||||||
|
|
|||||||||||||||||
|
|
|
|
z |
|
|
|
ин |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Мкр |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
M z |
0 Мкр |
|
|
|
Мкр dМин 0. |
|||||||||||||
z |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
M x 0 Mzx Q .
Кроме того, из курса сопротивления материалов известно, что
|
|
|
М |
кр |
; |
|||
|
|
|
|
|||||
z |
|
|
||||||
|
|
|
GIкр |
|||||
|
|
2 |
|
|
|
|
|
|
|
|
у |
Мх . |
|||||
|
|
|||||||
z2 |
||||||||
|
|
ЕJ |
||||||
Из (9.6) и (9.7) получим
(9.4)
(9.5)
(9.6)
(9.7)
|
|
|
|
|
|
|
|
|
|
|
|
2 |
y |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
(EJ |
|
) Q; |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
z |
|
|
z2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
GJ |
кр |
|
|
|
M кр. |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Подставим (9.4) и (9.8) в (9.5). В итоге имеем |
|
|
|
|||||||||||||||||||||||
|
|
2 |
(EJ |
|
2 |
y |
) m |
2 |
y |
r0 m |
2 |
|
0; |
|||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||
z2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
z2 |
|
t 2 |
|
|
|
t 2 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 y J |
|
|
2 |
|
|||||||||
|
(GJ |
|
|
) r |
m |
|
|
0. |
||||||||||||||||||
|
|
кр |
|
z.пог |
|
|
2 |
|||||||||||||||||||
z |
|
|
z |
0 |
|
|
|
t |
2 |
t |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
(9.8)
(9.9)
115
Для полного решения задач о свободных колебаниях необходимо проинтегрировать эти уравнения и подчинить их заданным краевым условиям:
при z = 0 y 0; yz 0; 0;
|
|
|
|
|
2 у |
|
|
|
|
|
|
3 у |
|
|
|
|
|
|
|
|
||
при z = lк |
М |
х |
0 |
|
|
|
0 |
|
; Q |
y |
0 |
|
|
|
0 |
|
; М |
кр |
0 |
|
0 |
. |
|
2 |
|
3 |
|||||||||||||||||||
|
|
|
|
z |
|
|
|
|
|
z |
|
|
|
|
z |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Здесь lк – длина консоли крыла.
Применим принцип возможных перемещений. Умножим первое из уравнений на y, а второе – на и проинтегрируем их по z в пределах от 0 до lк. Получим
lк |
|
|
2 |
|
|
|
2 |
y |
lк |
|
|
2 |
y |
|
|
|
|
2 |
) dz 0; |
||||||||
|
|
y |
|
|
|
(EJ |
|
)dz |
y ( |
|
r0m |
|
|||||||||||||||
z2 |
z2 |
t 2 |
|
|
|
||||||||||||||||||||||
|
0 |
|
|
0 |
|
|
|
|
|
t 2 |
|
|
(9.10) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 y |
|
|
|
|
|
|
|||
lк |
|
|
|
|
|
|
|
|
|
lк |
|
|
|
|
J z.пог |
2 |
|
) dz 0. |
|||||||||
|
|
|
|
|
|
(GJкр |
|
|
|
|
)dz (r0m |
|
|
2 |
|
2 |
|||||||||||
z |
|
z |
t |
t |
|||||||||||||||||||||||
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Первое из уравнений (9.10) выражает работу погонной нагрузки на перемещениях (прогибах) крыла y, а второе – работу крутящих моментов на углах закручивания .
Произведя интегрирование по частям с учетом краевых условий, окончательно получим [17]
lк |
|
2 y |
|
2 |
|
lк |
|
2 y |
r0m |
2 |
|
) dz |
|
|
|
||||||
|
|
EJ ( |
|
|
) |
|
|
dz y ( |
t2 |
|
2 |
0; |
|
||||||||
z2 |
|
|
t |
|
|||||||||||||||||
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
. |
(9.11) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
lк |
|
|
|
|
2 |
lк |
|
|
2 y |
J z.пог |
2 |
|
) dz 0. |
|
|||||||
|
GJкр( |
|
|
) |
|
|
dz |
(r0m |
|
2 |
|
2 |
|
||||||||
z |
|
|
t |
t |
|
||||||||||||||||
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||||
Системы (9.9) и (9.11) используются для определения частот и форм собственных колебаний различных агрегатов ЛА.
9.2. Свободные крутильные колебания крыла постоянного сечения
Предположим, что положение ц.и. и ц.м. в крыле совпадают (r0 = 0). Тогда системы (9.9) и (9.11) распадаются на независимые уравнения [17].
Из (9.9)
|
(GJкр |
|
) J z.пог |
2 |
0. |
(9.12) |
|
z |
z |
t2 |
|||||
|
|
|
|
116

Из (9.11)
l |
|
l |
|
2 |
dz 0. |
|
к GJкр( |
)2 dz к J z.пог |
|
(9.13) |
|||
z |
|
|
||||
0 |
0 |
t2 |
|
|||
Если крутильная жёсткость GJкр и погонный массовый момент инерции Jz.пог неизменны вдоль размаха крыла, то последние уравнения
примут вид |
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
||||||
GJкр |
|
|
J z.пог |
0; |
(9.14) |
||||||||||||||
|
|
z2 |
t |
2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
l |
|
|
|
|
|
|
|
|
l |
|
|
|
|
2 |
dz 0. |
|
|||
GJкр к ( |
)2 dz J z.пог к |
|
(9.15) |
||||||||||||||||
|
|
|
|||||||||||||||||
0 |
z |
|
|
|
0 |
|
|
|
t 2 |
|
|||||||||
Решим уравнение (9.14). Пусть |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
(z,t) = (z)· (t). |
|
|
(9.16) |
|||||||||||||
После подстановки в (9.14) переменные разделяются |
|
||||||||||||||||||
|
GJкр |
|
2 |
|
|
2 |
|
|
|
|
|||||||||
|
|
z2 |
|
|
|
t 2 |
|
p2 . |
|
||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
J z.пог |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
В этом уравнении левая часть зависит только от z, а правая – только от t. Такое возможно, если каждая из частей представляет собой константу. Обозначив её (–р2), получим два уравнения.
где 2 p2 J z.пог
GJкр
d 2 |
|
p2 |
0; |
||
|
|
|
|
||
|
2 |
|
|||
d t |
|
|
|
||
|
|
|
|
|
|
d 2 |
2 |
0, |
|||
|
2 |
|
|||
d t |
|
|
|
|
|
.
(9.17)
(9.18)
Решения уравнений (9.17) имеют вид
(t) A1 sin pt A2 cos pt; |
|
(9.19) |
|
|
|
||
(z) B1 sin z B2 cos z. |
|
|
|
Граничные условия: при z = 0 = 0; при z = lк |
|
0 . |
|
z |
|||
|
|
Из первого условия следует, что B2 = 0. Из второго условия В1 cos lк 0 . Тривиальное решение (B1 = 0) отбрасываем. Остаётся
lк |
n |
, n = 1,3,5… |
(9.20) |
|
2 |
||||
|
|
|
117

После подстановки (9.18) в (9.20) получим круговую частоту крутильных колебаний
|
|
pn |
n |
|
|
GJкр |
|
, n = 1,3,5… |
|
(9.21) |
||||
|
|
2lк |
|
J z.пог |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
Таким образом, решением уравнения (9.14) является ряд |
|
|||||||||||||
|
|
n (z) Bn sin |
n z |
, |
|
n = 1,3,5.., |
|
|
|
|||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
2lк |
|
|
|
|
|
|
|
||
что соответствует углам закручивания |
|
|
|
|
|
|
|
|||||||
|
n |
(z,t) sin n z (A |
|
sin (p |
n |
t) A |
cos(p |
n |
t)) |
(9.22) |
||||
|
2lк |
1n |
|
|
|
|
2n |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
или |
|
n (z,t) (t) sin n z . |
|
|
(9.23) |
|||||||||
|
|
|
|
|
|
|
|
|
|
2lк |
|
|
|
|
Из формул (9.22) и (9.23) видно, что в любой момент времени t закон изменения углов закручивания по размаху консоли будет один и тот же
(sin n z ), а изменяться во времени будет только амплитуда колебаний. 2lк
В формуле (9.23) выражение (sin |
n z ) называется функцией формы |
|
2lк |
колебаний (рис. 9.10). Форма колебаний, соответствующая наименьшему n = 1, называется основным тоном колебаний, все остальные формы колебаний называются обертонами (n = 3 – первый обертон, n = 5 – второй обертон и т.д.).
а) |
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|||||
Ψ1 |
|
|
|
|
|
t = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
n=1 |
|
|
|
n=3 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
t = t1 |
|
Ψ2 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
t = t2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Узел колебаний |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
t = t3 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
t = t4 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
1 |
|
|
z/lк |
|
|
|
|
|
1 |
z/lк |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t = t3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
t = t4 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t = t2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t = t1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 9.10. Функции формы крутильных колебаний: |
t = 0 |
|
|
||||||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
а – основной тон; б – первый обертон |
|
|
|
|
|||||||||||||
118

При |
z k |
2lк |
, где k – любое целое число, угол закручивания |
|
|||
|
|
n |
|
n (z, t) 0 |
при любом t. Сечения, расположенные слева и справа от этой |
||
точки, закручиваются в разные стороны. Такие точки называются узлами |
|||||||||
колебаний. Число их на крыле равно |
n 1 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2 |
|
|
|
|
|
|
|
|
Период колебаний T |
2 , с. Частота колебаний |
n |
|
1 |
|
pn |
, Гц. |
||
|
|
||||||||
n |
pn |
|
Tn |
2 |
|||||
|
|
|
|||||||
9.3. Свободные крутильные колебания крыла переменного сечения
Исходное дифференциальное уравнение крутильных колебаний имеет вид [17]
|
(GJкр |
|
) J z.пог |
2 |
0. |
|
|
|
t2 |
||||
z |
z |
|||||
|
|
|
Непосредственное интегрирование этого уравнения невозможно, поскольку коэффициенты уравнения являются функциями z, заданными численно, а не аналитически. Поэтому используют метод последовательных приближений.
Как и в случае крыла постоянного сечения, решение будем искать в
виде
|
|
|
n (z, t) n (z) n (t) n (z) An sin( pn t n ) . |
|
(9.24) |
|||||||||||||
|
Подставив (9.24) в предыдущее уравнение, получим: |
|
|
|
|
|||||||||||||
A |
sin( p |
|
t |
|
) |
|
(GJ |
|
n |
) |
|
p2 J |
|
A sin( p |
|
t |
|
) 0 . |
|
|
|
|
|
|
|
|
|||||||||||
n |
|
n |
|
n |
|
z |
кр z |
n |
n |
z.пог |
n |
n |
|
n |
|
|||
После сокращения и замены частных производных на полные приходим к обыкновенному дифференциальному уравнению
d |
|
d n |
2 |
|
|
|
(GJкр |
d z |
) pn |
J z.пог n . |
|
d z |
|||||
|
|
|
Интегрируем это уравнение первый раз от lк до z
d n |
2 |
|
1 |
z |
|
|
|
|
|||
d z |
pn |
|
|
|
J z.пог n d z C1 . |
|
|||||
|
|
GJкр lк |
|
||
Используя граничное условие zn 0 (Мкр = 0) при z = lк, получим
С1 = 0.
119
Следовательно,
d n |
|
2 |
1 |
z |
|
|
|
|
|
|
|
|
|
||||
d z |
|
pn |
|
|
|
J z.пог n d z . |
|
(9.25) |
|
|
|
||||||
|
|
GJкр lк |
|
|
|
|||
Интегрируем второй раз от 0 до z и получаем |
|
|
||||||
n pn2 |
z |
1 |
|
z |
|
|
|
|
( |
|
J z.пог n d z) d z |
C2 . |
(9.26) |
||||
|
|
|||||||
|
0 |
GJкр lк |
|
|
|
|
||
Постоянная интегрирования С2 = 0 из граничного условия n 0 при
z = 0.
Используем формулы (9.25) и (9.26) для решения задачи методом последовательных приближений. Возьмем за нулевое приближение функцию формы колебаний крыла постоянного сечения
|
0n sin n z . |
|
|
2lк |
|
Подставляя её в правую часть выражений (9.25) и (9.26), получаем |
||
первое приближение n1 и |
1n с точностью до общего множителя pn2 |
. Ра- |
|
z |
|
нее было показано, что при определении функции формы колебаний общий множитель не является существенным и, следовательно, он может быть опущен. Поэтому при вычислении функции ψn взамен формул (9.25) и (9.26) можно записать:
i |
|
1 |
|
z |
i 1 |
|
|
||
d n |
|
|
|
dz ; |
(9.27) |
||||
d z |
|
|
|
|
|
|
J z.пог n |
||
|
|
|
|
||||||
|
|
GJкр lк |
|
|
|
||||
|
|
|
in |
|
z |
d i |
|
(9.28) |
|
|
|
|
|
n dz . |
|
||||
|
|
|
|
|
0 |
d z |
|
|
|
Для удобства сравнения приближений умножаем функцию 1n на |
|||||||||
|
|
1 |
|
|
|
|
|
||
нормирующий коэффициент |
|
|
|
|
|
, чтобы на конце консоли (z = lк) |
|||
1 |
|
||||||||
|
|
|
|
|
|
|
|||
|
|
n |
z lк |
|
|
||||
значение функции формы крутильных колебаний было бы равно 1. |
|
||||||||
Полученную таким образом функцию формы колебаний ψ1n |
снова |
||||||||
вводим в правую часть уравнения (9.27), а затем (9.28) и получаем второе
приближение |
d n2 |
и n2 |
. Снова нормируем результат, умножая его на ве- |
||||
|
|
|
|
|
d z |
|
|
личину |
1 |
|
, и т.д. |
|
|||
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
n |
z lк |
|
|
||
|
|
|
|
|
|
||
120