

3. Информационные микропроцессорные системы
Информационные МПС – это МПС, у которых отсутствует строгая математическая модель объекта, точные инструкции для формирования управляющего воздействия на объект. МП используется для сбора информации о состоянии объекта. Для этого используются измерительные преобразователи, преобразующие состояния физических процессов в электрические сигналы (датчик скорости объекта, положение объекта, температура объекта, напряжение, ток и т. д.). Отсутствует строгая модель описания объекта. Пример: электронное правительство.
В основе ее составлена инструкция диспетчеру для работы в штатных и нештатных ситуациях. Иначе применяют информационно-управляющую ИС (ИУС).
О сновная
роль ИС –
собирать информацию об объекте, сохранять
ее в виде журналирования и передавать
в орган для принятия решения.
сновная
роль ИС –
собирать информацию об объекте, сохранять
ее в виде журналирования и передавать
в орган для принятия решения.
Основное требование к ИС: большое разнообразие различных внешних устройств ввода/вывода информации, необходимы большие объемы памяти для хранения данных и большая надежность хранения информации. Применяют ПК и мощные серверы, способные поддерживать систему документооборота.
4. Scada – системы
SCADA-системы (Supervisory Control And Data Acquisition, АСДУ – автоматизированные системы диспетчерского управления и сбор данных) – инструментальная программа для разработки ПО систем управления технологическими процессами в реальном времени и для удаленного сбора данных. Особенность АСДУ: все управляющие воздействия на объект подаются лично диспетчером, он полностью отвечает за принятые решения. Применяется для управления сложными технологическими объектами, работа которых связана с жизнедеятельностью и ответственностью человека. Пример: система управления ж/д транспортом. Отсутствует строгая математическая модель.
Задачи: обмен данными с УСО (устройствами связи с объектом) в реальном времени через соответствующие драйверы; обработка информации по заданным алгоритмам в реальном времени; отображение информации на экране монитора в понятной для человека форме; ведение БД реального времени с технологической информацией; аварийная сигнализация и управление тревожными сообщениями; подготовка и генерирование отчетов о ходе технологического процесса; осуществление сетевого взаимодействия между SCADA и внешними приложениями (СУБД, электронными таблицами).
Для подсоединения драйверов вв./выв. к SCADA есть эффективное и надежное средство передачи данных между процессами – OLE (Object Linking and Embedding – включение и встраивание объектов). Применение OPC-серверов (OLE for Process Control – технология связывания и внедрения объектов) означает применение программных стандартов обмена данными с технологическими устройствами.
OPC (OLE for Process Control – технология OLE для промышленной автоматизации), построенная на основе модели COM/DCOM (COM – Component Object Model – объектно-ориентированная технология разработки клиент-серверных приложений, DCOM – Distributed Component Object Model – распределенная COM). Любые устройства и программные приложения разных производителей обмениваются данными между собой с применением единого программного протокола. «+» ОРС: универсальность и интегрируемость (применение контроллеров и других аппаратных средств и ПО различных производителей); масштабируемость (перенос технических решений между сис-ми); возможность построения распределенных систем; модульность построения сис-м.
MDAC (Microsoft Data Access Components) – это совокупность технологий, которая позволяет программистам получить унифицированный и полный способ разработки приложений для доступа фактически к любым видам данных.
Microsoft DCOM – Distributed Component Object Model – удаленный доступ к серверу через службу распределенных компонентов.
Все устройства и каналы связи называются объектами. Все объекты сгруппированы в древовидную структуру – адресное пространство ОРС-сервера. Каждый объект ОРС-сервера характеризуется типом, номером и именем. Объект может иметь подобъекты различных типов, которые в свою очередь могут содержать собственные подобъекты. Информация об адресном пространстве, т.е. все объекты и их свойства, хранится в конфигурационной БД ОРС-сервера. В конфигурационной БД ОРС-сервер сохраняет справочники объектов, адресное пространство, имитационные сигналы, информацию о пользователях и правах доступа пользователей.
Для организации хранения данных в ОРС-сервере применяется Microsoft SQL Server (Structured Query Language – «язык структурированных запросов») – система управления реляционными (отношение) базами данных.
Структура SCADA: Человек -> пульт диспетчера (клав., мышь) -> УСО -> объект -> датчики (ТС, ТИТ, ТИИ)-> OPC-сервер -> пульт диспетчера (индик.) -> человек
SCADA система представляет собой 3 уровня:
III верхний: уровень корпоративного управления, СУБД – SQL
II средний: OPC-клиенты, OPC-сервер
I нижний: микропроцессорные контроллеры, объект
5. Оптимальные и самообучающиеся микропроцессорные системы
Оптимальное управление – это управление, при котором обеспечиваются max и min определенного функционала, специально разработанного для оптимизации работы системы, обеспечивает такое соотношение между параметрами системы, которые гарантируют высокое качество работы. При этом система может быть с переменными параметрами. Ф(∆x(t), ∆k(t)) – функционал.
Оптимальные системы находят экстремум функционала, который зависит от всех параметров системы, но не гарантирует экстремум каждого из параметров.
Обычно, в кач-ве функционалов используются интегральные оценки.

1) Модуль отклонения от заданного значения. Позволяет оценивать систему с любыми допустимыми значениями отклонений, поэтому он применяется в простейших, не очень ответственных системах. Пример: утюг.
«-» Эта функция недифференцируема, поэтому аналитическим образом нельзя найти экстремум функции и реализовать соответствующий алгоритм в МПС.
2) Минимум среднеквадратического отклонения. Функция в любой точке дифференцируема и легко поддается алгоритмизации в МПС. Отношение интегрируется с квадратом. Такие функционалы используются в более ответственных системах, которые связаны с риском для жизни человека. Пример: радиатор отопления.
3) Функционал типа ограничение. Если хотя бы раз ошибка выходит за заданные пределы, то такая система считается неработоспособной. Пример: транспорт.
Самонастраивающаяся система – оптимальная система, у которой есть возможность изменять параметры отдельных блоков системы во время ее работы.
В кач-ве применяемых пар-ров обычно используется коэфф-т пропорциональности различных составляющих закона управл-ия. Их можно изменить во время работы сис-мы.
Самообучающиеся системы реализуются только на МП, т.к. для их работы необходимо иметь большой объем оперативной памяти. Для хранения всех входных воздействий в системе и состояния объекта после этого воздействия. Если состояние объекта после определенного воздействия ухудшается, то такое воздействие помечается знаком "-", т.е. плохое и наоборот. При формировании дальнейших входных воздействий, предварительно они сравниваются с уже имеющимися в памяти состояниями. И если они приводили ранее к отрицательным результатам, то ищется другое воздействие (в памяти МПС), которое уже приводило к положительным результатам и т.д.
Для реализации самообучающейся системы реализуется функционал и используется следующая структура. В памяти МПС строится обычная таблица.
Ф(∆x(t), k(t), s(t)) = f[F=(∆x(t), F(k(t)), F(s(t))]
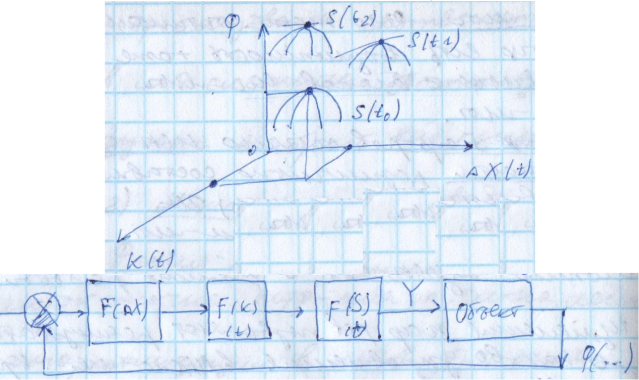

Самообучающаяся МПС копирует живые организмы и их поведение в природе, а матрицу коэффициентов можно считывать уже с работающей системы и записывать в память вновь созданной системы, и заранее ее обучать до ее эксплуатации.
6. Реализация законов управления в микропроцессорных системах
1)
пропорциональный
закон управления
(П-регулирование, регулирование по
отклонению от входного воздействия).
Это управляющее воздействие формируется
пропорционально отклонению объекта от
управляющего воздействия.
 (t)
(t)
(+) простота техн-ой реализации (в МП достаточно операции умножения)
(-) наличие ошибки по положению (статистическая), При увеличении Кп система переходит в неустойчивое состояние.
2) релейный (Кп = ∞). Усилитель выполняет функции компаратора.
Нормальным режимом являются автоколебания в системе и управляющие воздействие благодаря инерционности объекта сглаживается.
На выходе модулируется ШИМ-сигнал (наиболее удобный сигнал для применения в МП), который поступает на объект, а он имеет инерционный характер (ФНЧ), поэтому он сглаживает автоколебания на выходе появляется постоянный сигнал.
(+): высокое быстродействие, удобство эксплуатации и настройки.
(-): большие энергозатраты, поэтому в настоящее время этот режим применяется редко
3) ПИ (пропорционально-интегральный)
В состав управляющего воздействия
добавляется интегральная составляющая
к ошибке в системе и после ее интегрирования,
ошибка компенсирует так, что исключает
саму себя. Интегральная составляющая
позволяет накапливать отклонения в
системе за какой-либо интервал времени
и добавляет его к управляющему воздействию.
Т.о., с течением времени любая ошибка по
положению компенсируется и всегда будет
равна 0 в зависимости от коэффициента
интегральной составляющей. Поэтому
интегральная система и регуляторы
обладают астатизмом 1-го порядка –
отсутствует ошибка по положению, но
присутствует ошибка по скорости. Обычно,
программы управления пишутся на языке
С.
состав управляющего воздействия
добавляется интегральная составляющая
к ошибке в системе и после ее интегрирования,
ошибка компенсирует так, что исключает
саму себя. Интегральная составляющая
позволяет накапливать отклонения в
системе за какой-либо интервал времени
и добавляет его к управляющему воздействию.
Т.о., с течением времени любая ошибка по
положению компенсируется и всегда будет
равна 0 в зависимости от коэффициента
интегральной составляющей. Поэтому
интегральная система и регуляторы
обладают астатизмом 1-го порядка –
отсутствует ошибка по положению, но
присутствует ошибка по скорости. Обычно,
программы управления пишутся на языке
С.
(+) отсутствие рывков и резких ускорений в системе, поэтому ПИ законы применяются там, где необходимо сглаживать механические удары в системе.
(-): малый запас устойчивости по фазе (интегральная составляющая задерживается на π/2 и может привести систему на границу устойчивости). Низкое быстродействие.
4 )
ПИД
)
ПИД
Диф. составляющая заранее позволяет управлять процессом. Наиболее распространенный ЗУ.
(+) высокое быстродействие, высокая точность управления, большой запас по фазе, обеспечивающий устойчивость системы.
В МП дифф. составляющая вычисляется как первая разность между текущим значением ∆x и предшествующим значением. ПИД регулятор берет все достоинства предыдущих законов управления и устраняет их недостатки.
7. Назначение и основные ресурсы однокристальных ЭВМ
Микропроцессорная система (МПС) – функционально законченное изделие, состоящее из 1 или нескольких устройств, главным образом микропроцессорных: микропроцессора и/или микроконтроллера.
Однокристальные ЭВМ выпускаются в самом массовом количестве и применяются в бытовой технике.
А ЛУ – производит арифметико-логические преобразование данных.
ЗУ – служит для хранения программы и данных.
УУ (упр. устр.) – синхронизирует работу МП, принимает управляющие сигналы и формирует сигналы управления внешними устройствами.
Инт – интерфейсная система МП предназначена для связи с другими устройствами ПК. Интерфейс – совокупность средств сопряжения и связи устройств компьютера, обеспечивающая их эффективное взаимодействие.
ШУ (шина управления) – принимает сигналы от внешних устройств и формирует сигналы управления этими устройствами.
ШД (шина данных) – работает в дуплексном режиме.
ША (шина адреса) – работает только на вывод и выдает адрес для обращения к внешнему устройству. В однокристальных ЭВМ все выводы имеют 2-4 назначения в зависимости от режима работы и программирования МП.
Однокристальные ЭВМ – это устройство, на 1 кристалле которого реализованы АЛУ, ЗУ, УУ, Инт, ШУ, ШД, ША (все ресурсы, необходимые для обработки информации). Выпускаются в массовом количестве, имеют низкую стоимость и применяются в бытовой технике. На 1 кристалле имеет все ресурсы для обработки информации. Назначение – обработка сигналов в реальном времени. Интерфейсы – парал., посл., система прерываний.
«-» – малая вычислительная мощность и ограниченное количество ресурсов (8-16 бит, 256 Б ОЗУ, 8 кБ ПЗУ, 24-32 линии).
«+» – могут выпускаться в массовом количестве и имеют очень низкую стоимость.
Однокристальные МП получаются при реализации всех аппаратных средств процессора в виде одной БИС или СБИС (сверхбольшой интегральной схемы). По мере увеличения степени интеграции элементов в кристалле и числа выводов корпуса параметры однокристальных микропроцессоров улучшаются. Однако возможности однокристальных микропроцессоров ограничены аппаратными ресурсами кристалла и корпуса. Для получения многокристального микропроцессора необходимо провести разбиение его логической структуры на функционально законченные части и реализовать их в виде БИС (СБИС). Функциональная законченность БИС многокристального микропроцессора означает, что его части выполняют заранее определенные функции и могут работать автономно.