

Реализация на основе цпоас цф первого порядка ких.
КИХ – Фильтр с конечной импульсной характеристикой.
Для реализации цифровой обработки сигналов и систем управления в реальном времени применяются цифровые процессоры обработки сигналов (ЦПОС).
Фильтр – это устройство, которое реализует функцию свертки входного сигнала с импульсной переходной характеристикой фильтра (это реакция объекта на воздействие дельта-функции (производная от единичной функции)).
Принцип работы фильтра:
Входной сигнал умножается на требуемый коэффициент передачи, далее поступает на последовательные задержки на 1 такт, в качестве которых в МП используются ячейки памяти. Количество этих ячеек памяти определяет порядок фильтра.
С выходов задержки сигналы поступают на сумматор B после умножения на постоянные коэффициенты b (коэффициенты БИХ-фильтра), а через другие множители значений сигналов умножаются на коэффициенты a (коэффициенты КИХ-фильтра), и выходной сигнал получается на сумматоре A.
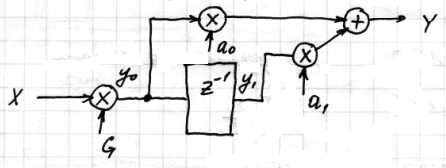

Алгоритм: Uвых=Y0*A0+Y1*A1
Программа:
ADD U, Y0, R1, NOP;
ADD U, Y1, R2, NOP;
Если необходимо реализовать фильтр большего порядка, необходимо добавить задержку и коэффициенты находятся по специальным программам.
Реализация на основе цпоас цф первого порядка бих.

БИХ – Фильтр с бесконечной импульсной характеристикой.
Ограничения на устойчивость БИХ-фильтра: B=1-G
Чем ближе B к единице, тем больше постоянная времени: B->1; T->бесконечности (B<1)
Программа, реализующая БИХ-фильтр первого порядка: G=0.5, B=0.5
Алгоритм:
Y1=Y0; задержка на Т
Y0=Y1*B+X*G
Программа:
LDA Y1, Y0, R0, NOP; задержка на Т
ADD Y0, Y1, R0(*0.5), NOP; сумма Y1/2
ADD Y0, X, R1, NOP; сумма X/2
Если необходимо реализовать фильтр большего порядка, необходимо добавить задержку и коэффициенты находятся по специальным программам.
43. Реализация на основе цпоас цф второго порядка с ких
Для реализации цифровой обработки сигналов и систем управления в реальном времени применяются цифровые процессоры обработки сигналов (ЦПОС).
Фильтр – это устройство, которое реализует функцию свертки входного сигнала с импульсной переходной характеристикой фильтра (это реакция объекта на воздействие дельта-функции (производная от единичной функции)).
КИХ – Фильтр с конечной импульсной характеристикой.
Принцип работы фильтра:
Входной сигнал умножается на требуемый коэффициент передачи, далее поступает на последовательные задержки на 1 такт, в качестве которых в МП используются ячейки памяти. Количество этих ячеек памяти определяет порядок фильтра.
С выходов задержки сигналы поступают на сумматор B после умножения на постоянные коэффициенты b (коэффициенты БИХ-фильтра (Фильтр с бесконечной импульсной характеристикой)), а через другие множители значений сигналов умножаются на коэффициенты a (коэффициенты КИХ-фильтра), и выходной сигнал получается на сумматоре A.
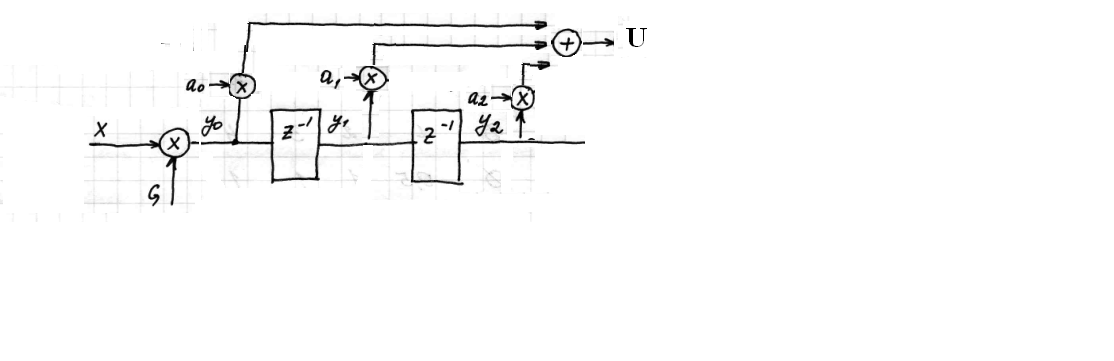
Алгоритм: Uвых=Y0*A0+Y1*A1+ Y2*A2
Программа:
ADD U, Y0, R1, NOP;
ADD U, Y1, R2, NOP;
ADD U, Y2, R3, NOP;
Если необходимо реализовать фильтр большего порядка, необходимо добавить задержку и коэффициенты находятся по специальным программам.
Общий коэффициент передачи фильтра определяется коэффициентом G, хоть и он равен 4, переполнение разрядной сетки не происходит, т.к. входные значения X находятся в младших разрядах МП.
Для реализации фильтра более высокого порядка обычно принимают последовательное включение большого числа фильтров первого или второго порядка.