

1.7 Визначення прискорення вантажу за рівнянням Лагранжа іі роду
Рівняння Лагранжа ІІ роду має вигляд
![]() (1.77)
(1.77)
де
– кінетична енергія системи;
![]() – узагальнена координата;
– узагальнена координата;
![]() – узагальнена сила;
– узагальнена сила;
![]() – узагальнена швидкість;
– число степеней кількості системи
(число узагальнених координат).
– узагальнена швидкість;
– число степеней кількості системи
(число узагальнених координат).
Примітка:
1. Число рівнянь Лагранжа рівне числу незалежних узагальнених координат даної системи.
2. Невідомі реакції ідеальних в’язей, накладених на систему, в ці рівняння не входять.
3. Кінетична енергія механічної системи визначається, як функція узагальнених координат, узагальнених швидкостей і часу.
4. Кожній узагальненій координаті відповідає своя узагальнена сила, яка визначається за формулою
 .
(1.78)
.
(1.78)
Розглянемо задану механічну системи (рис. 1.10).
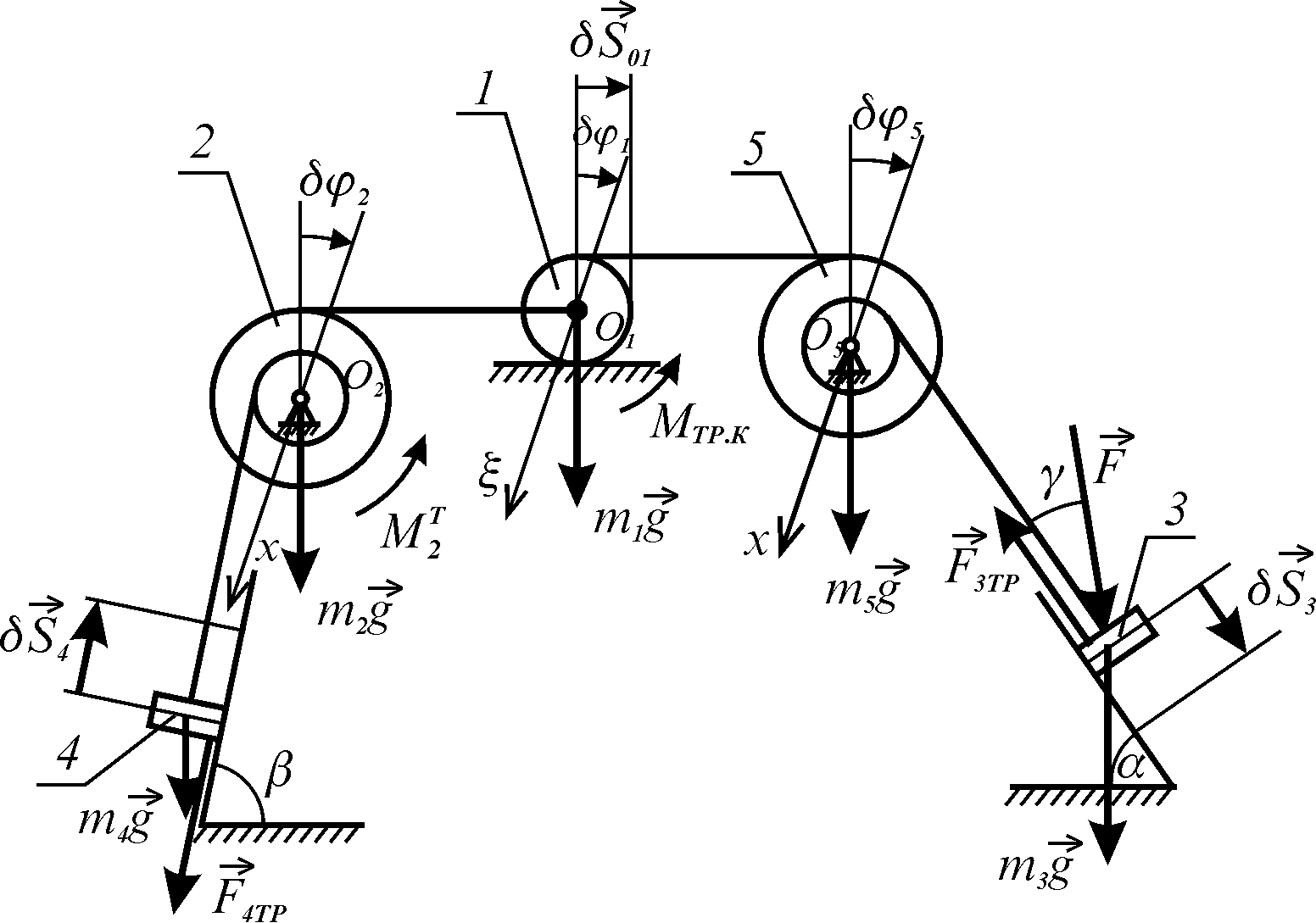
Рисунок 1.10
Ця система має
одну ступінь вільності, а тому її
положення може бути визначено однією
узагальненою координатою За узагальнену
координату приймемо переміщення
![]() ланки 3, тоді узагальнена швидкість буде
рівна
ланки 3, тоді узагальнена швидкість буде
рівна
![]() .
.
На основі (1.77) складаємо рівняння Лагранжа
![]() .
(1.79)
.
(1.79)
1. Кінетичну енергію системи визначимо як функцію узагальненої швидкості . Скористаємося виразом (1..59)
 .
(1.80)
.
(1.80)
2. Прикладемо до
системи всі задані сили
![]()
![]() і моменти
і моменти
![]() .
Для обчислення узагальненої сили
.
Для обчислення узагальненої сили
![]() ,
яка відповідає узагальненій координаті
,
надамо цій координаті приріст і складемо
суму елементарних робіт всіх заданих
сил на отриманому переміщенні системи:
,
яка відповідає узагальненій координаті
,
надамо цій координаті приріст і складемо
суму елементарних робіт всіх заданих
сил на отриманому переміщенні системи:
![]()
![]() .
(1.81)
.
(1.81)
На основі співвідношень (1.8)
![]() .(1.82)
.(1.82)
(1.81) прийме вигляд
![]()
![]() .
(1.83)
.
(1.83)
Узагальнена сила
![]() на основі (1.78) рівна
на основі (1.78) рівна
![]()
![]() .
(1.84)
.
(1.84)
3. Отримані значення підставляємо в (1.79). Для цього попередньо знайдемо відповідні похідні:

 ;
;
(1.85)

.
4. Підставляючи (1.84) і (1.85) в рівняння (1.79) і виконуючи певні перетворення, отримаємо

![]() ,
(1.86)
,
(1.86)
що відповідає виразу, отриманому раніше.
1.8 Числовий розрахунок прискорення вантажу
Для отримання числового значення визначимо:
1. Силу тертя вантажу
3 з площиною нахиленою до горизонту під
кутом
![]() .
.
![]()
![]() (н).
(1.87)
(н).
(1.87)
2. Сила тертя вантажу 4 з площиною нахиленою до горизонту під кутом рівна
![]() (н).
(1.88)
(н).
(1.88)
3. Момент тертя кочення катка 1 рівний
![]() (Нм).
(1.89)
(Нм).
(1.89)
4. Момент інерції однорідного циліндричного катка, визначається формулою
![]() (кгм2),
(1.90)
(кгм2),
(1.90)
де – маса катка; – вісь, яка проходить через центр мас перпендикулярно площині рисунка; – радіус катка.
5. Момент інерції шківа 2, маса якого рівно розподілена вздовж його ободу, рівний
![]() (кгм2),
(1.91)
(кгм2),
(1.91)
де – радіус обода шківа.
6. Момент інерції
шківа 5, радіус інерції якого рівний
![]() м
м
![]() (кгм2).
(1.92)
(кгм2).
(1.92)
7. Підставимо
значення мас ланок механізму, радіусів
шківів і катка, моменту опору
кутів
![]() ,
а також (1.5), (1.92), (1.91), (1.90), (1.89), (1.88) і (1.87)
і (1.86), отримаємо:
,
а також (1.5), (1.92), (1.91), (1.90), (1.89), (1.88) і (1.87)
і (1.86), отримаємо:

(1.93)
 (м/с2)
(м/с2)
Відповідь:
Прискорення вантажу 3 рівне
![]() м/с2.
м/с2.