

Задача д11
До горизонтального
вала, що закріплений у підшипниках А
та В
жорстко прикріплені: в точці
— однорідний суцільний диск радіуса
м й масою
![]() кг, площина котрого перпендикулярна до
осі вала, а центр ваги зміщений від осі
вала на відстань
кг, площина котрого перпендикулярна до
осі вала, а центр ваги зміщений від осі
вала на відстань
![]() ;
в точці
— тонкий прямолінійний стрижень довжиною
;
в точці
— тонкий прямолінійний стрижень довжиною
![]() м й масою
кг, що утворює з віссю вала кут
м й масою
кг, що утворює з віссю вала кут
![]() До вала прикладений обертовий момент
М,
як вказано на рис. Д 11.
До вала прикладений обертовий момент
М,
як вказано на рис. Д 11.
В момент часу
с визначити реакції підшипників А
та В;
обчислити у відсотках долю їхніх
динамічних складових, якщо у вказаний
момент часу відрізок
та стрижень
![]() знаходиться в координатних площинах,
що вказані в табл.
Д 11а. Необхідно
для розв’язання дані наведені в табл.
Д 11а та Д 11б.
знаходиться в координатних площинах,
що вказані в табл.
Д 11а. Необхідно
для розв’язання дані наведені в табл.
Д 11а та Д 11б.
Таблиця Д 11а Таблиця Д 11б
Варіант |
Нм |
|
Коорд. площини, в яких знаходиться |
|
Варіант |
м |
м |
м |
град |
|
|
|
|||||||||
1 |
8 |
0,05 |
|
|
1 |
0,2 |
0,5 |
0,3 |
30 |
|
2 |
10 |
0,10 |
|
|
2 |
0,3 |
0,2 |
0,5 |
45 |
|
3 |
12 |
0,15 |
|
|
3 |
0,5 |
0,3 |
0,2 |
60 |
|
4 |
|
0,20 |
|
|
4 |
0,2 |
0,6 |
0,2 |
90 |
|
5 |
|
0,25 |
|
|
5 |
0,6 |
0,2 |
0,2 |
120 |
|
6 |
14 |
0,30 |
|
|
6 |
0,3 |
0,3 |
0,4 |
135 |
|
7 |
|
0,50 |
|
|
7 |
0,4 |
0,2 |
0,4 |
150 |
|
8 |
5 |
0,40 |
|
|
8 |
0,2 |
0,7 |
0,1 |
30 |
|
9 |
9 |
0,20 |
|
|
9 |
0,3 |
0,4 |
0,3 |
60 |
|
0 |
7 |
0,00 |
|
|
0 |
0,3 |
0,5 |
0,2 |
120 |
|
У вказаний момент
часу вал має кутову швидкість
![]() с-1.
с-1.
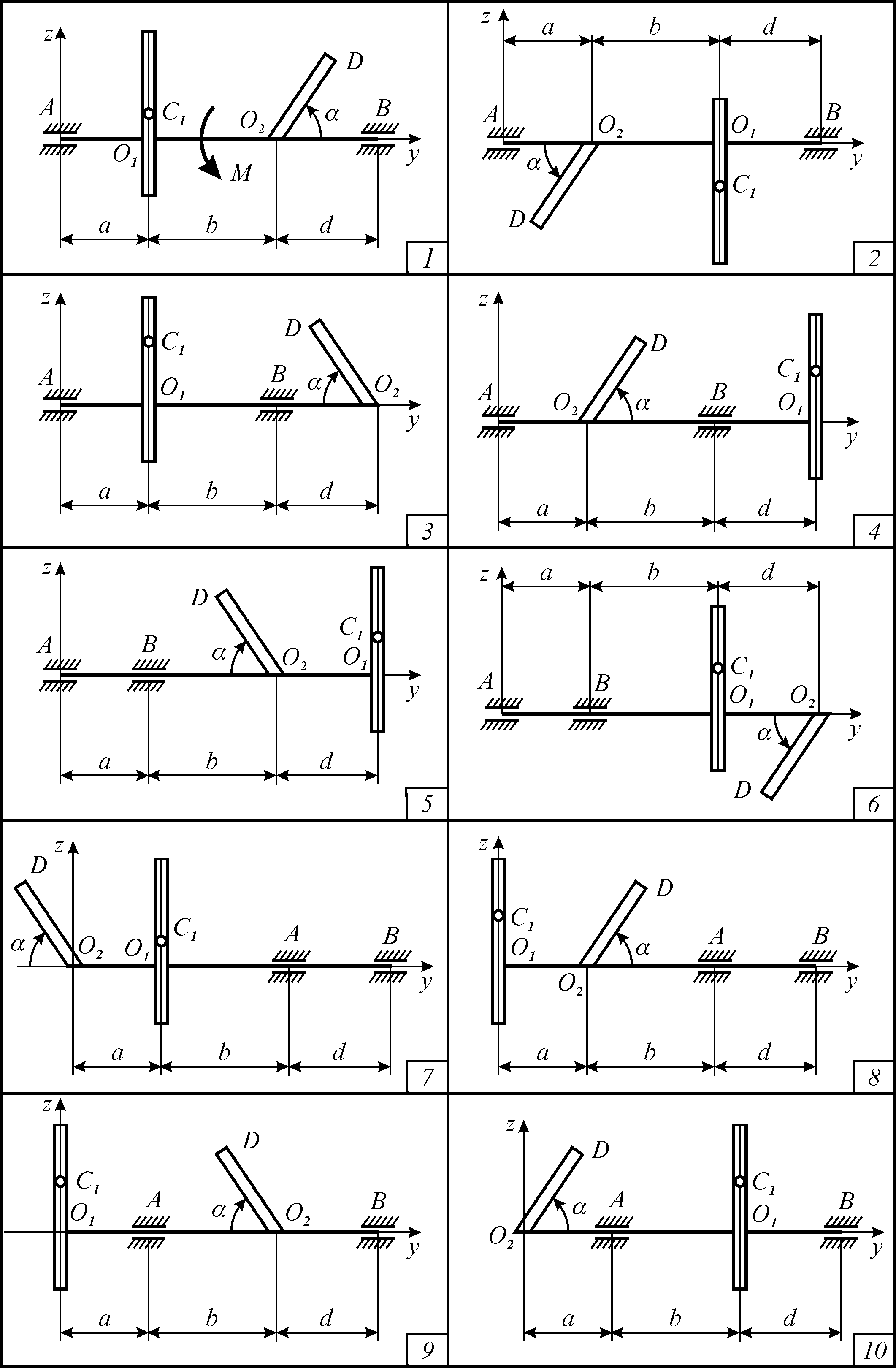
Рисунок Д11
Задача д12
На механізм, що
розташований у горизонтальній площині,
діють, як показано на рис. Д12, пара сил
з моментом М
та дві сили
та
.
Довжини стрижнів дорівнюють
![]()
![]() м;
м;
![]() м. Довжини інших стрижнів вибрати
самостійно. Точка К
знаходиться посередині стрижня АВ.
м. Довжини інших стрижнів вибрати
самостійно. Точка К
знаходиться посередині стрижня АВ.
Згідно заданим К
та
визначити величину й напрямок сили
,
якщо механізм перебуває в рівновазі в
положенні, що визначається кутами
![]() .
Значення всіх заданих величин подані
в табл. Д 12а та Д 12б.
.
Значення всіх заданих величин подані
в табл. Д 12а та Д 12б.
Таблиця Д 12а Таблиця Д 12б
Варіант |
Нм |
|
|
|
|
Варіант |
Н |
|
|
|
град |
град |
|||||||||
1 |
10 |
90 |
150 |
30 |
1 |
100 |
30 |
60 |
||
2 |
12 |
50 |
120 |
60 |
2 |
120 |
45 |
60 |
||
3 |
14 |
45 |
135 |
45 |
3 |
140 |
60 |
45 |
||
4 |
18 |
30 |
90 |
60 |
4 |
160 |
90 |
30 |
||
5 |
20 |
0 |
60 |
120 |
5 |
180 |
120 |
60 |
||
6 |
19 |
120 |
45 |
135 |
6 |
200 |
135 |
30 |
||
7 |
17 |
135 |
30 |
150 |
7 |
220 |
150 |
45 |
||
8 |
15 |
150 |
120 |
60 |
8 |
240 |
30 |
30 |
||
9 |
13 |
180 |
150 |
30 |
9 |
260 |
45 |
60 |
||
0 |
11 |
30 |
135 |
45 |
0 |
280 |
60 |
30 |
||
Примітка:
побудову креслення починати зі стрижня
![]() положення котрого визначається кутом
.
положення котрого визначається кутом
.
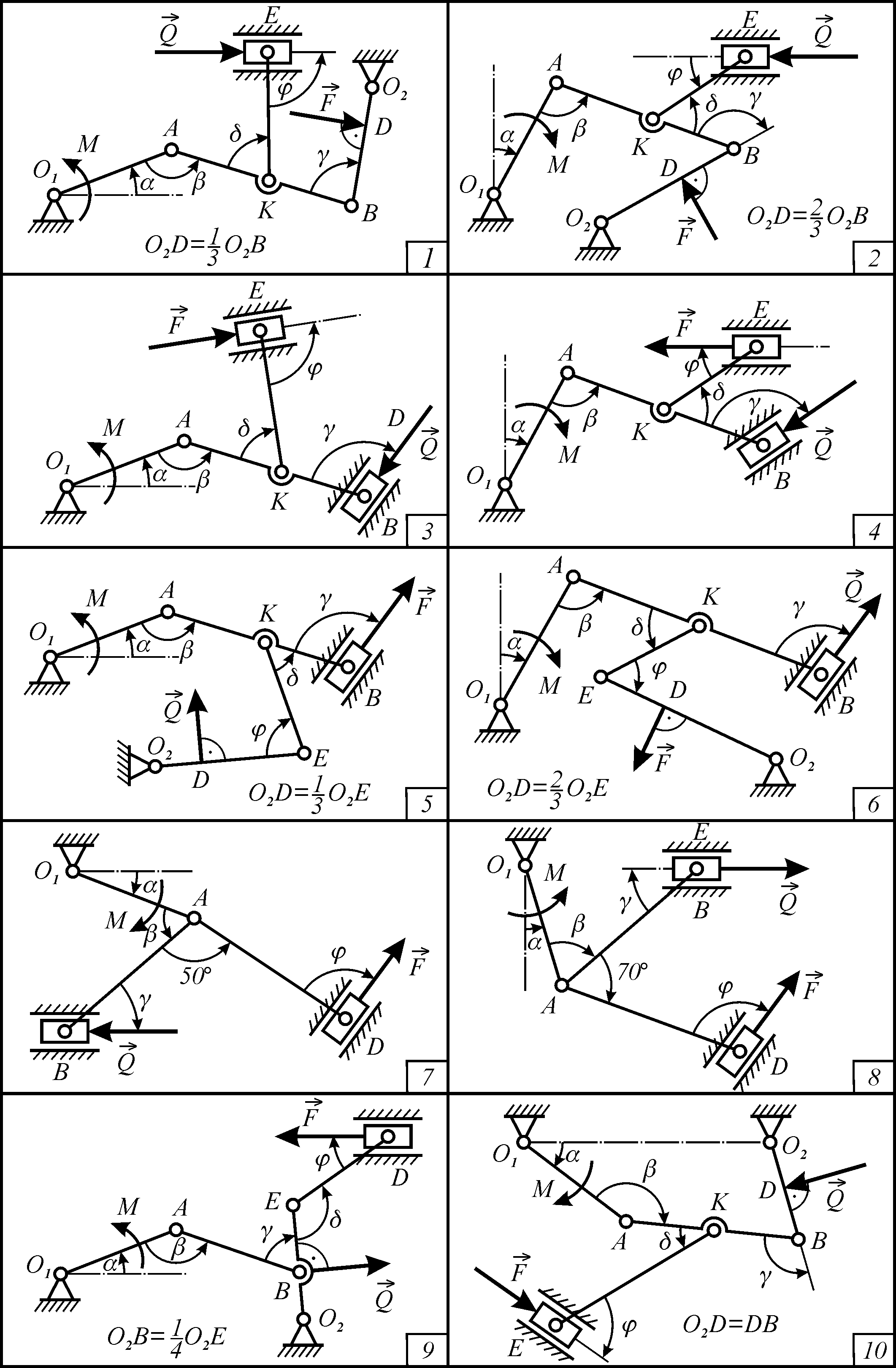
Рисунок Д12
ЗАДАЧА Д13
Застосовуючи принцип можливих переміщень, визначити реакції зовнішніх опор складної конструкції, котра задана у задачі С4. Необхідні для розв’язання дані вибрати з табл. С 4а та С 4б.
ЗАДАЧА Д14
Застосовуючи загальне рівняння динаміки, визначити кутове прискорення шківа 2 механізму, що заданий у задачі Д10. Необхідні для розв’язання дані вибрати з табл. Д 10а та Д 10б.
ЗАДАЧА Д15
Складаючи рівняння Лагранжа другого роду, визначити кутове прискорення шківа 2 механізму, що заданий у задачі Д10. Необхідні для розв’язання дані вибрати з табл. Д 10а та Д 10б.
ЗАДАЧА Д 16-1
Скласти диференційні
рівняння руху механічної системи, що
складається з точки А
масою
![]() і точки В
масою
і точки В
масою
![]() котрі з’єднані невагомим стрижнем
довжини
.
Точка А
рухається гладкою циліндричною поверхнею
радіуса
(рис.
Д 16-1).
котрі з’єднані невагомим стрижнем
довжини
.
Точка А
рухається гладкою циліндричною поверхнею
радіуса
(рис.
Д 16-1).
ЗАДАЧА Д 16-2
Скласти диференційні
рівняння руху механічної системи, що
складається з тіла 1 масою
і точки 2 масою
![]() .
Точка й тіло з’єднані невагомим стрижнем.
Саме тіло приєднано до вертикальної
стіни пружини, коефіцієнт жорсткості
якої С
(рис. Д 16-2). Тертям знехтувати. Довжина
стрижня
.
.
Точка й тіло з’єднані невагомим стрижнем.
Саме тіло приєднано до вертикальної
стіни пружини, коефіцієнт жорсткості
якої С
(рис. Д 16-2). Тертям знехтувати. Довжина
стрижня
.
ЗАДАЧА Д 16-3
Дошка АВ масою рухається похилою площиною, що складає з горизонтом кут . нею може рухатися без ковзання однорідний суцільний циліндр масою (рис. Д 16-3). Скласти диференційні рівняння руху системи. Всіма опорами знехтувати.
ЗАДАЧА Д 16-4
На гладкій горизонтальній площині розміщена трикутна призма масою . Гранню призми котиться без ковзання однорідний круглий циліндр масою . Скласти диференційні рівняння руху системи, якщо до призми прикладена сила . Всіма опорами знехтувати (рис. Д 16-4).
ЗАДАЧА Д 16-5
Механічна система, що складається з тіла А масою та суцільного однорідного циліндра масою , знаходиться на гладкій площині, котра складає з горизонтом кут (рис. Д 16-5). До тіла прикріплена тонка нитка, що намотана на циліндр, який, розмотуючи нитку, скочується площиною. Скласти диференційні рівняння руху системи, якщо до тіла А прикладена сила . Всіма опорами знехтувати.
ЗАДАЧА Д 16-6
Система складається з тонкого однорідного стрижня 1 масою , на одному кінці якого є горизонтальна вісь обертання А, а на другому — за допомогою пружини з коефіцієнтом жорсткості прикріплений вантаж масою . Стрижень утримується у вертикальній площині пружини з коефіцієнтом жорсткості . Скласти диференційні рівняння руху системи.
ЗАДАЧА Д 16-7
Однорідний
суцільний циліндр масою
і радіуса
![]() ,
падаючи під дією сили ваги, призводить
до руху за допомогою тонкої невагомої
нитки блок 2 радіуса
,
падаючи під дією сили ваги, призводить
до руху за допомогою тонкої невагомої
нитки блок 2 радіуса
![]() ;
маса котрого рівномірно розподілена
уздовж його ободу (рис. Д 16-7). Нехтуючи
всіма опорами, скласти диференційні
рівняння руху системи.
;
маса котрого рівномірно розподілена
уздовж його ободу (рис. Д 16-7). Нехтуючи
всіма опорами, скласти диференційні
рівняння руху системи.
ЗАДАЧА Д 16-8
Однорідний суцільний циліндр А масою та радіуса , рухається гладкою похилою площиною, що складає з горизонталлю кут . Циліндр обмотано тонкою невагомою ниткою, що перекинута через невагомий блок С й прикріплено до вантажу В масою . Скласти диференційні рівняння руху системи (рис. Д 16-8).
ЗАДАЧА Д 16-9
Матеріальна точка А масою рухається уздовж тонкого однорідного кільця радіуса та масою , котра обертається навколо вертикальної осі під дією моменту М (рис. Д 16-9). Скласти диференційні рівняння руху системи.
ЗАДАЧА Д 16-0
Скласти диференційні рівняння руху механічної системи, що складається з однорідного суцільного циліндра масою , котрий скочується без ковзання похилою площиною, що утворює кут з горизонтом, й тонкого прямолінійного стрижня довжиною 0,6 м та масою . Стрижень здійснює коливання навколо осі, що проходить через центр циліндра перпендикулярно до площини рисунка (рис. Д 16-0).
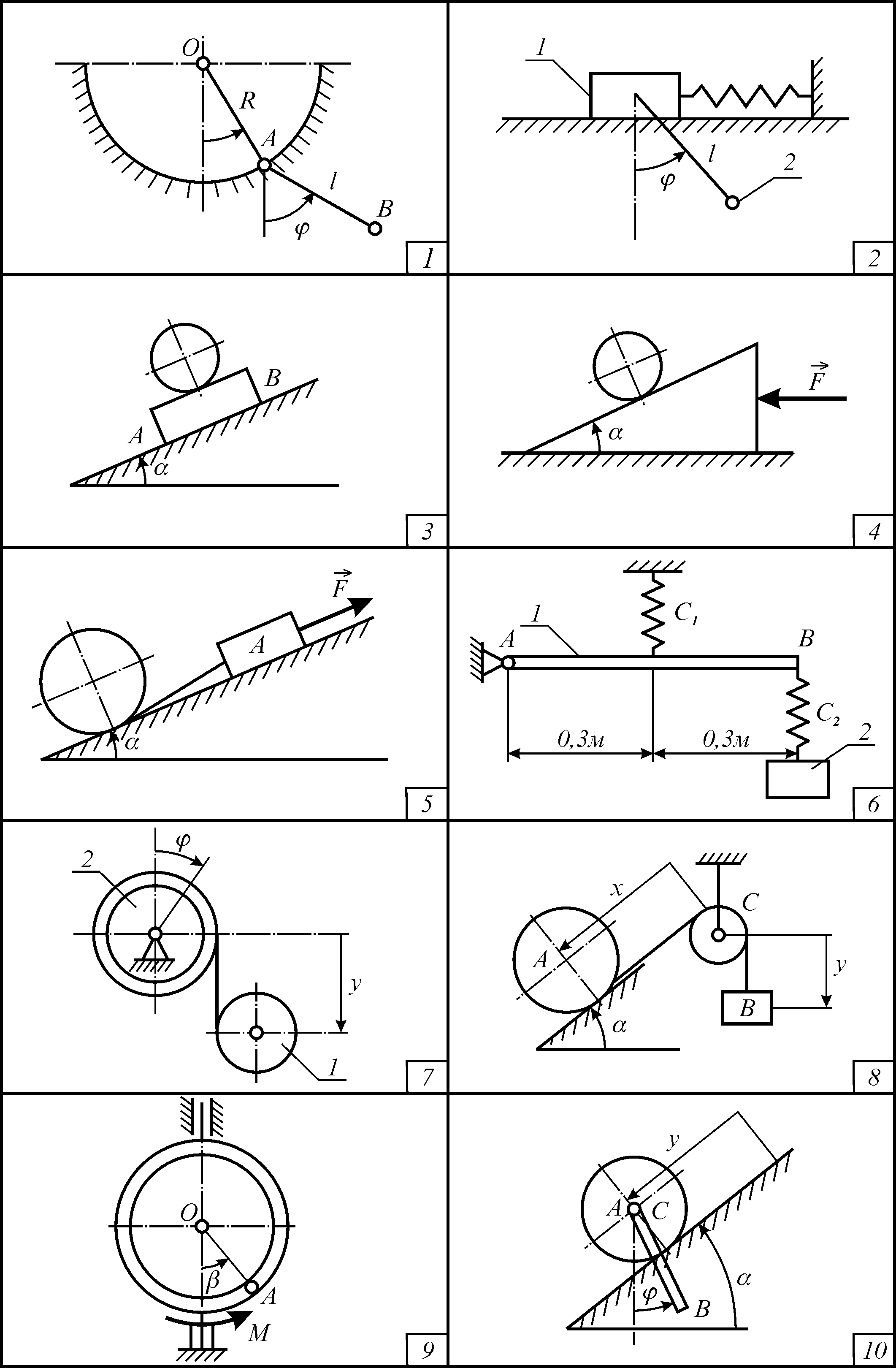
Рисунок Д 16