

5.6. Задача с6
Необхідно знати:
5.6.1. Рівняння рівноваги довільної просторової системи сил:
![]()
![]() (5.16)
(5.16)
Для рівноваги довільної просторової системи сил необхідно й достатньо, щоб суми проекцій всіх сил на кожну з трьох координатних осей та суми їхніх моментів відносно цих осей відповідно дорівнювали нулю.
Необхідно вміти:
5.6.2. Дію.в’язей представляти дією їхніх реакцій (див. § 3.1 табл. 1).
5.6.3. Проектувати вектор сили на координатній осі (див. § 6.2.).
5.6.4. Визначити момент сили відносно координатних осей (див. § 3.4).
Приклад 6-1.
Розв’язати
задачу С 6-1 контрольної роботи за
варіантом ІІІ, згідно до якого:
![]() кН,
кН,
![]() кН,
кН,
![]() кН,
кН,
![]() кНм,
АВ
= 1,5 м, АД
= 2,0 м,
кНм,
АВ
= 1,5 м, АД
= 2,0 м,
![]() м,
м,
![]() кН,
кН,
![]() кНм.
кНм.
Розв’язання.
1. Розглядаємо рівновагу прямокутного паралелепіпеда (рис. 5.13).
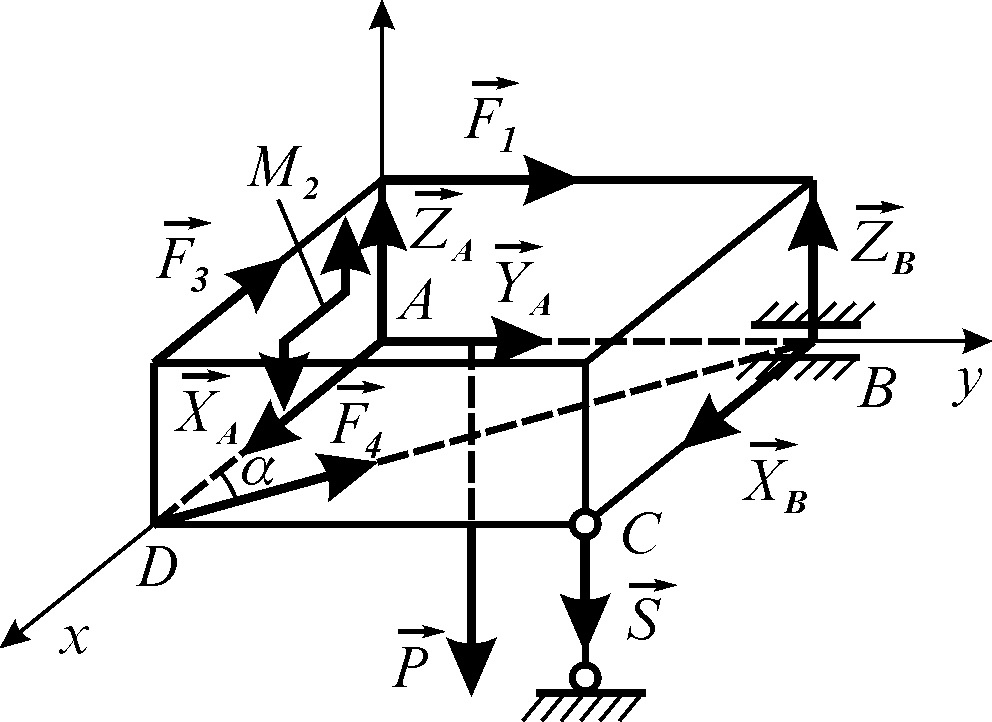
Рисунок 5.13
2. Зображуємо
активні сили, що діють на паралелепіпед:
![]() пара сил з моментом
пара сил з моментом
![]() та його вага
,
причому
та його вага
,
причому
![]() кН.
кН.
3. Звільняємо
паралелепіпед від в’язей, замінюючи
їх дію реакціями:
![]() — складові реакції сферичного шарніру;
— складові реакції сферичного шарніру;
![]() —
складові реакції циліндричного шарніра;
— реакція невагомого стрижня з шарнірами
на кінцях.
—
складові реакції циліндричного шарніра;
— реакція невагомого стрижня з шарнірами
на кінцях.
4. Вибрана система координат вказана на рис. 5.13.
5. На паралелепіпед діє довільна просторова системи сил. Складаємо рівняння її рівноваги (рівн. 5.16):
![]()
![]()
![]()
![]()
![]()
![]()
Значення
![]() та
та
![]() знаходимо з геометричних розмірів
знаходимо з геометричних розмірів
![]()
![]()
Підставляючи чисельні значення:
![]()
![]()
![]()
![]()
![]()
![]()
Знаходимо значення невідомих величин:
![]()
![]()
![]()
Знак мінус при
![]() та
та
![]() вказує, що напрямки даних реакцій
протилежні тим, що вказані на рис. 5.13.
вказує, що напрямки даних реакцій
протилежні тим, що вказані на рис. 5.13.
Приклад 6-2. Розв’язати задачу С 6-2 контрольної роботи за варіантом 222, відповідно до якого:
![]()
![]()
![]()
Розв’язання.
1. Розглядаємо рівновагу вала (рис. 5.14).
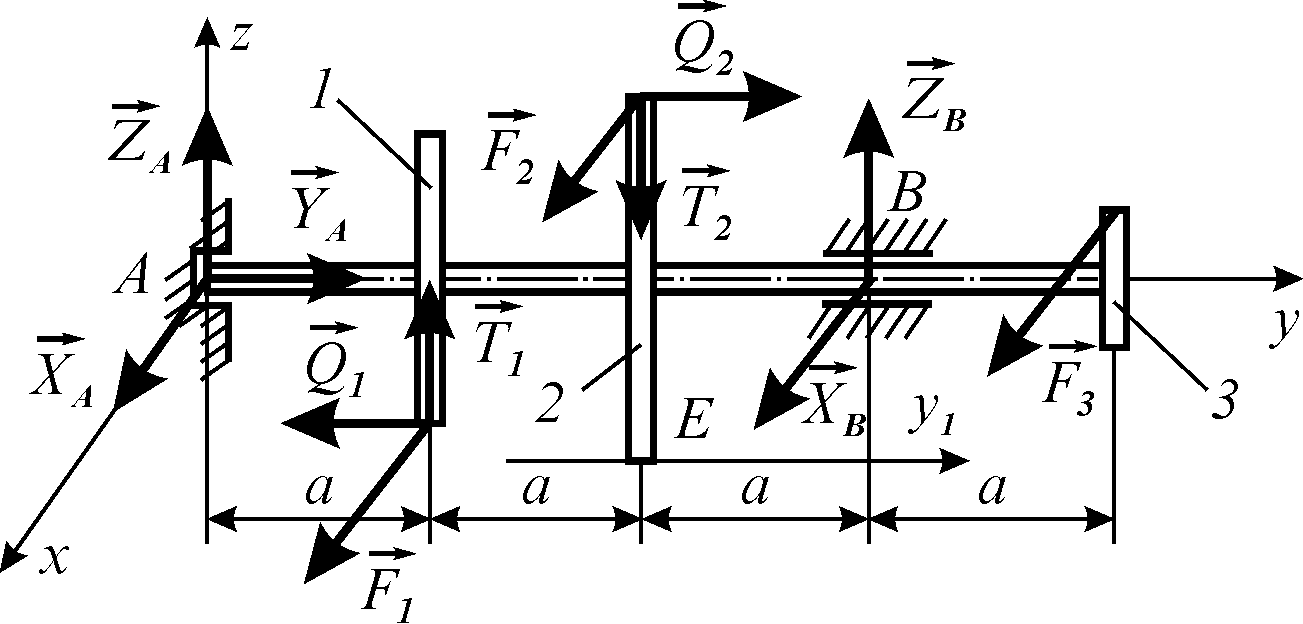
Рисунок 5.14
2. Зображуємо
активні сили, що діють на вал:
![]()
![]()
3. Звільняємо вал
від в’язей, замінюючи їх дію реакціями
![]() — складові реакції упорного підшипника
А;
— складові реакції упорного підшипника
А;
![]() — складові реакції підшипника В.
— складові реакції підшипника В.
4. Вибрана система координат вказана на рис. 5.14.
5. На вал діє довільна просторова система сил. Складаємо рівняння її рівноваги:
![]()
![]()
![]()
![]()
![]()
![]()
6. Підставивши чисельні значення:
![]()
![]()
![]()
![]()
![]()
![]()
і розв’язавши отриману систему рівнянь
![]()
![]()
![]()
знаходимо значення невідомих величин
![]()
![]()
![]()
Для перевірки
отриманих значень складаємо
![]()
![]()
![]()
![]()
Перевірка виконується.
Відповідь.
![]()
![]()
Знак
мінус при значеннях
![]() вказує, що напрямки даних реакцій
протилежні тим, що вказані на рис. 5.14.
вказує, що напрямки даних реакцій
протилежні тим, що вказані на рис. 5.14.
5.7. Задача с7
Необхідно знати:
5.7.1. Формули, що визначають координати центра ваги однорідної плоскої фігури:
![]() (5.17)
(5.17)
у яких:
![]() — площа елемента плоскої фігури;
— площа елемента плоскої фігури;
![]() — координати його центра ваги.
— координати його центра ваги.
5.7.2. Спосіб розбиття.
Плоску фігуру розбивають на елементи, центри ваги на площі яких легко визначаються, і за формулами (5.17) знаходять координати центра ваги всієї фігури.
5.7.3. Спосіб від’ємних площ.
В способі розбиття площі вирізаних елементів беруться зі знаком мінус.
5.7.4. Формули, що визначають координати центра ваги геометричних фігур
2. Круговий сектор
ONP
(![]() см,
см,
![]() )
)
![]() см2
(беремо знак мінус, оскільки сектор є
вирізаним).
см2
(беремо знак мінус, оскільки сектор є
вирізаним).
За формулою (5.19)
 см;
отримуємо
см;
отримуємо
![]() см;
см;
![]() см.
см.
— трикутника
![]() (5.18)
(5.18)
де:
![]() — координати вершин трикутника.
— координати вершин трикутника.
|
— кругового сектора (рис. 5.15)
|
Рисунок 5.15 |

Приклад 7. Знайти координати центра ваги плоскої фігури, що зображена на рис. 5.16. Розміри наведені в см.

Рисунок 5.16
Розв’язання.
Для розв’язання задачі використовуємо метод розбиття в поєднанні з методом від’ємних площ. Виділимо в даній фігурі п’ять частин, знайдемо їхню площу і координати центрів ваги:
1. Прямокутник OАBN.
![]() см2;
см2;
![]() см;
см;
![]() см.
см.
3. Прямокутник
![]()
![]() см2;
см2;
![]() см;
см;
![]() см.
см.
4. Прямокутник
![]()
![]() см2;
см2;
![]() см;
см;
![]() см.
см.
5. Трикутник
![]()
![]() см2.
см2.
Мінус беремо, оскільки трикутник є вирізаний
![]() см;
см;
![]() см.
см.
6. Координати центра ваги заданої плоскої фігури знаходимо за формулами (5.17)
![]()
![]()
![]() см;
см;
![]()
![]()
![]() см.
см.
Відповідь:
![]() см;
см;
![]() см.
см.