

5.2. Задача с2
Необхідно знати:
5.2.1. Рівняння рівноваги системи збіжних сил:
![]() (5.5)
(5.5)
Для рівноваги системи збіжних сил необхідно й достатньо, щоб сума проекцій всіх сил системи на три координаційні осі відповідно дорівнювала б нулю.
5.2.2. Реакція в’язі, здійсненої прямолінійним невагомим стрижнем з шарнірами на кінцях, спрямована уздовж стрижня (див. табл. 1.1).
Необхідно вміти:
5.2.3. Проектувати вектор сили на координатні осі (див. § 3.2).
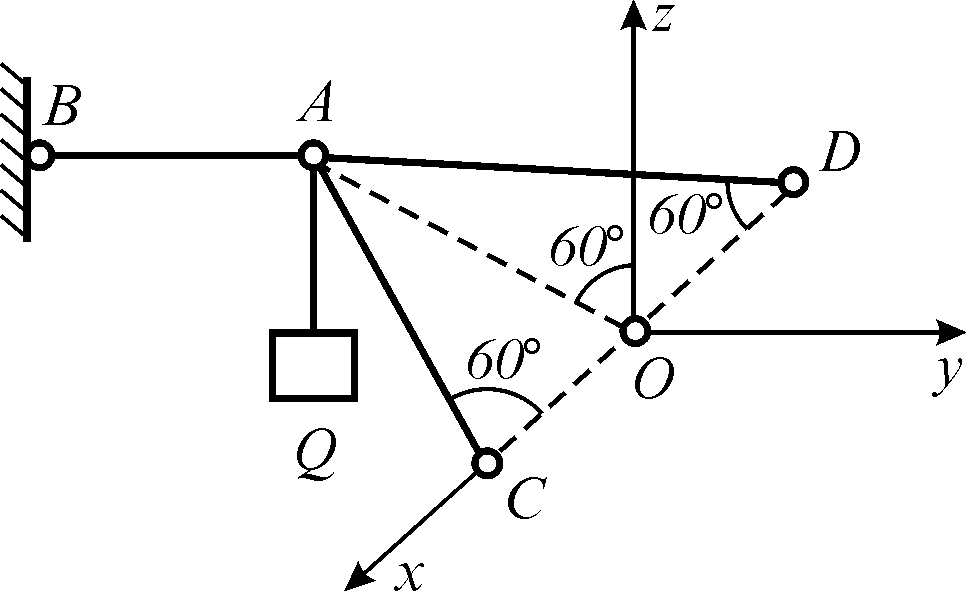
Приклад 2. Знайти зусилля в невагомих стрижнях кон-
|
конструкції
(див. рис. 5.4), що підтримує вантаж Q
= 500 Н, якщо кріплення в точках А,
В, С, Д
— шарнірні, а стрижень АВ
— паралельний осі
|
Рисунок 5.4 |
Розв’язання.
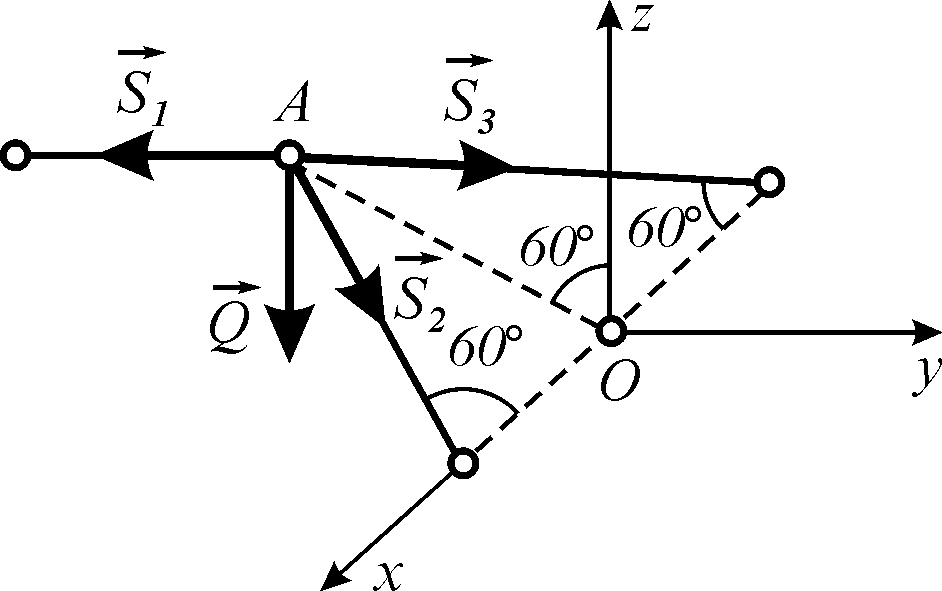
1. Розглядаємо рівновагу шарніра А (рис. 5.5).
|
2.
На шарнір А
діють:
3. Вибираємо систему координат, як вказано на рис. 5.5. 4. Так як на шарнір А діє система збіжних сил, складаємо рівняння рівноваги (рівн. 5.5): |
Рисунок 5.5 |
![]()
![]()
![]()
Примітка:
при проектуванні
![]() та
та
![]() на координатні осі
і
на координатні осі
і
![]() застосували положення подвійного
проектування (див. § 3.2).
застосували положення подвійного
проектування (див. § 3.2).
5. Розв’язуємо отриману систему рівнянь
![]()
![]() ;
;
![]() .
.
Підставляючи чисельні значення, отримуємо
![]() Н
Н
![]() Н.
Н.
Відповідь:
![]()
Знак мінус при
значеннях
![]() та
та
![]() свідчить, що стрижні працюють на
стискання.
свідчить, що стрижні працюють на
стискання.
5.3. Задача с3.
Необхідно знати:
5.3.1. Рівняння рівноваги плоскої системи сил. Їх можна записати у трьох формах:
а)
![]() (5.6)
(5.6)
Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб суми проекцій усіх сил на кожну з двох координатних осей і сума їх моментів відносно будь-якої точки, що лежить у площині дії сил, відповідно дорівнювали нулю.
6)
![]() (5.7)
(5.7)
Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб сума проекцій всіх сил на будь-яку вісь, що лежить у площині дії сил та суми їхніх моментів відносно двох будь-яких точок, що лежать також у площині дії сил, відповідно дорівнювали нулю.
Примітка: точка А та В довільні, але відрізок АВ, що з’єднує точки, не повинен бути перпендикулярним осі, на яку проектуються сили.
в)
![]() (5.8)
(5.8)
Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб суми моментів усіх сил відносно будь-яких трьох точок, що знаходяться у площині дії сил і не лежать на одній прямій, відповідно дорівнювали нулю.
При розв’язанні задачі краще за все застосувати рівняння рівноваги в формулі 5.6, котрі вважаються основними, оскільки:
вони не накладають обмежень на вибір координатних осей і точки, відносно якої складається сума моментів;
складання рівнянь проекцій є задачею більш простою, ніж видання рівнянь моментів.
5.3.2,
Дію на тверде тіло рівномірно розподіленого
навантаження інтенсивністю
![]() можна замінити дією його рівнодійної
,
обчислюється за формулою
можна замінити дією його рівнодійної
,
обчислюється за формулою
![]() (5.9)
(5.9)
і яка прикладена посередині АВ — ділянки її дії (див. рис. 5.6)
Необхідно вміти:
5.3.3. Дію в’язей замінити дією їхніх реакцій (див. § 3.1) табл. 1.1.
5.3.4. Проектувати вектор сили на координатні осі (див. § 3.2).
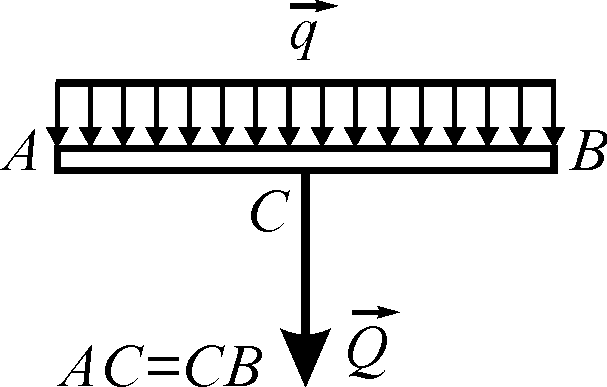
Рисунок 5.6
5.3.5. Визначити момент сили відносно точки (див. § 3.3).
5.3.6. Визначити момент пари сил відносно точки (див. § 3.5).
Приклад. Визначити реакції заробки жорсткої рами АВ, якщо
![]()
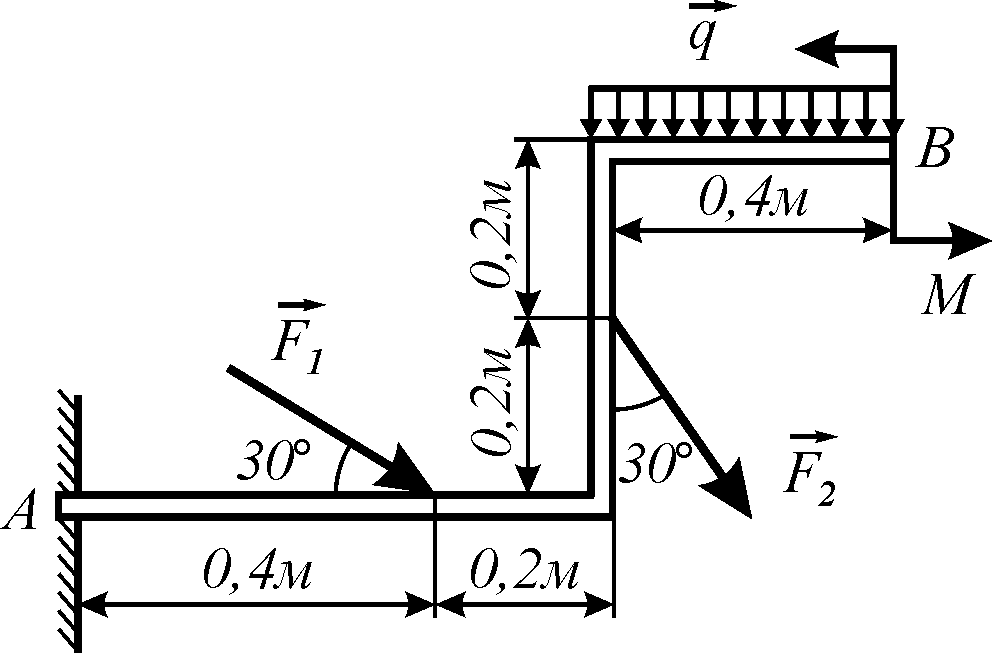
Рисунок 5.7
Розв’язання.
1. Розглядаємо рівновагу рами АВ (рис. 5.8).
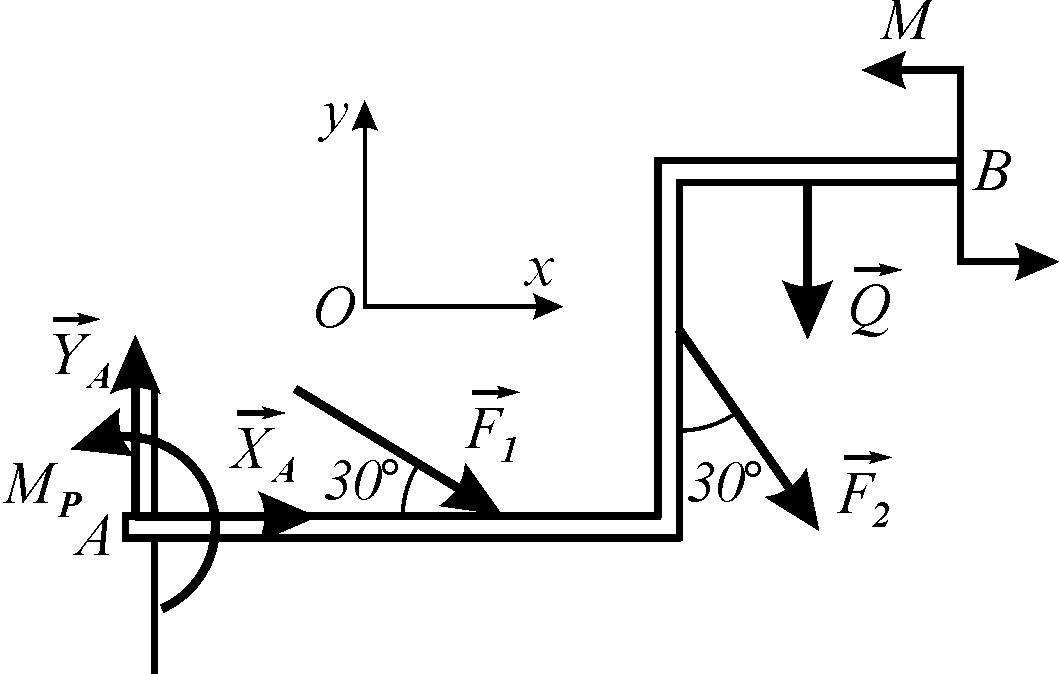
Рисунок 5.8
2. Зображуємо сили,
що діють на раму:
![]() — задані
сили;
— рівнодійна
рівномірно розподіленого навантаження,
причому
— задані
сили;
— рівнодійна
рівномірно розподіленого навантаження,
причому
![]()
— момент пари сил.
3. Звільняємо раму
від в’язей. В’язею
є защемлення. Дія защемлення еквівалентна
силі, розкладеній на складові
![]() та
та
![]() і з моментом
і з моментом
![]() .
.
4. Вибрана система координат вказана на рис. 5.8.
5. На раму діє довільна плоска система сил. Складаємо рівняння рівноваги (рівн. 5.6):
![]()
![]()
![]()
![]()
Підставляючи чисельні значення
![]()
![]()
![]()
![]()
знаходимо невідомі величини
![]() Нм.
Нм.
Для перевірки складемо суму моментів діючих на раму сил відносно точки В:
![]()
![]()
![]()
![]()
Отримане значення відповідає точності проведених обчислень і підтверджує достовірність отриманих результатів.
Відповідь.
![]() Нм.
Нм.
Знак мінус при
значеннях
![]() та
вказує на
те, що їх напрямки протилежні вказаним
на рисунку.
та
вказує на
те, що їх напрямки протилежні вказаним
на рисунку.
5.4. ЗАДАЧА С4
Необхідно знати:
5.4.1. Якщо конструкція з’єднаних тіл знаходиться в рівновазі, то кожна її складова частина також знаходиться в рівновазі. Таким чином, задачі на рівновагу системи з’єднаних тіл можна на роэв’язувати двома способами;
а) розглядається рівновага кожного тіла окремо (при розгляді рівноваги одного тіла системи останні тіла системи будуть для нього в’язями);
б) розглядається рівновага системи всіх тіл разом узятих, а вже потім розглядається рівновага окремого тіла і складається необхідна кількість рівнянь рівноваги (при розгляді рівноваги системи всіх тіл у рівняння рівноваги не ввійдуть сили, з котрими окремі тіла діють одне на одного, тобто внутрішні сили).
Вибір методу розв’язання задач залежить від умови задачі й навичок того, хто її розв’язує. Можна лише порекомендувати, що коли за умовою задачі не потрібно визначати зусилля в з’єднувальних елементах, то задачу раціональніше розв’язувати другим способом.