

МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ И РОБОТОТЕХНИКИ
Кафедра «Системы автоматизированного проектирования»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по дисциплине
«Геометрическое моделирование»
Тема: «Получение реалистического изображения трехмерного объекта, представляющего собой полигональную сетку, его преобразование и проецирование»
Исполнитель: студентка гр. 107528
Клецкова Ю.В.
Руководитель: Сиденко Л.А.
Минск 2012
Содержание.
1. Описание объекта и получение геометрической модели. 4
2. Геометрические преобразования. 5
3. Проецирование. 7
4. Удаление невидимых линий. 15
5. Закраска изображения с учетом освещения. 16
6. Разработка интерфейса программы. 18
Заключение. 19
Литература. 20
Приложение. 21
Тестирование результатов работы программы. 21
Введение
При решении большинства задач в области автоматизированного конструирования и технологической подготовки производства надо иметь модель объекта проектирования. Модель объекта – некоторое абстрактное представление, удовлетворяющее условию адекватности этому объекту и позволяющее осуществлять его представление и обработку с помощью компьютера. Модель – набор данных, отображающих свойства объекта и совокупность отношений между этими данными.
В модель объекта, в зависимости от характера ее исполнения, может входить ряд разнообразных характеристик и параметров. Чаще всего модели объектов содержат данные о форме объекта, его размерах, допусках, применяемых материалах, механических, электрических, термодинамических и других характеристиках, способах обработки, стоимости, а также о микрогеометрии (шероховатость, отклонения формы, размеров). Для обработки модели в графических системах САПР существенным является не весь объем информации об объекте, а та часть, которая определяет его геометрию, т.е. формы, размеры, пространственное размещение объектов.
Описание объекта с точки зрения его геометрии называется геометрической моделью объекта. Но геометрическая модель может в себя включать еще и некоторую технологическую и вспомогательную информацию. Информация о геометрических характеристиках объекта используется не только для получения графического изображения, но и для расчетов различных характеристик объекта (например, по МКЭ), для подготовки программ для станков с ЧПУ. В традиционном процессе обмен информацией осуществляется на основе эскизных и рабочих чертежей с использованием нормативно-справочной и технической документации. В САПР этот обмен реализуется на основе внутримашинного представления объекта.
Под геометрическим моделированием понимают весь многоступенчатый процесс – от вербального (словесного) описания объекта в соответствии с поставленной задачей до получения внутримашинного представления объекта.
В системах геометрического моделирования могут обрабатываться 2-мерные и 3-хмерные объекты, которые в свою очередь могут быть аналитически описываемыми и неописываемыми. Аналитически неописываемые геометрические элементы, такие как кривые и поверхности произвольной формы, используются преимущественно при описании объектов в автомобиле-, самолета- и судостроении.
Все сказанное выше доказывает то, что трехмерное моделирование это одна из самых важных задач, решаемых в САПР сегодня.
1. Описание объекта и получение геометрической модели.
В разрабатываемой программе предлагается создать реалистичное изображение трехмерного объекта, состоящего из двух конечных элементов типа параллелепипеда и призмы (треугольная, треугольник правильный), объединенных по плоскости без проникновения.
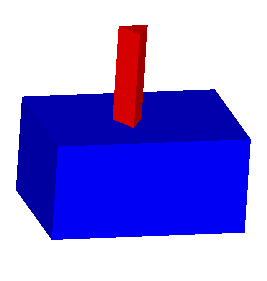
Рис.1. Реалистичное изображение трехмерного объекта.
В итоге в программе необходимо предусмотреть варианты соединения тел (впереди, сзади, сверху, снизу, слева, справа). При этом должна присутствовать возможность задания размеров тел (длина, высота, ширина параллелепипеда; высота и основание призмы ).
Над построенным таким образом объектом необходимо реализовать ряд геометрических преобразований, включающих в себя перемещение вдоль координатных осей, масштабирование, поворот вокруг координатных осей. Также в проекте должны присутствовать функции расширенного построения изображения объекта, то есть возможность построения ортографии (фронтальной, горизонтальной и профильной проекций), аксонометрии, косоугольной и перспективной проекциий.
Чтобы решить поставленную задачу необходимо получить трехмерную геометрическую модель выше описанного тела. Описание объекта с точки зрения его геометрии называется геометрической моделью объекта.
В данной работе я использую совокупность двух моделей: каркасной и поверхностной. В каркасной модели описываются вершины (их координаты) и грани (указатели на вершины). Это делается следующим образом:
V1={X1, Y1, Z1} – вершина, заданная координатами;
R1={ V1, V2,} - ребро, заданное двумя вершинами;
G1={V1, V2, V3, V4} – грань, заданная четырмя вершинами, где
V1 – V4 – это указатели на конкретные вершины.
Все координаты вершин заносятся соответственно в два массива для параллелепипеда pPar = new Point3[8] и для призмы pPr = new Point3[6].
Получение на экране каркасной модели осуществляется перебором всех граней, принадлежащих объекту, и последовательным отображением линий, соединяющих вершины, принадлежащих грани.
2. Геометрические преобразования.
К
геометрическим преобразованиям любого
объекта относятся перенос, масштабирование
и поворот (относительно точки либо оси).
Чтобы получить данные преобразования
я перемножаю матрицы точек
![]() объекта на матрицы соответствующего
преобразования
объекта на матрицы соответствующего
преобразования
![]() ,
,
![]() и
и
![]() .
В итоге получаются матрицы новых точек
объекта
.
В итоге получаются матрицы новых точек
объекта
![]() .
Трехмерные преобразования представляются
в виде матриц
.
Трехмерные преобразования представляются
в виде матриц
![]() .
Точка объекта
.
Точка объекта
![]() записывается в однородных координатах
как
записывается в однородных координатах
как
![]() ,
где
,
где
![]() .
Если же
.
Если же
![]() ,
то –
,
то –
![]() .
Точка, представленная в виде матрицы
имеет
вид:
.
Точка, представленная в виде матрицы
имеет
вид:
 .
.
Перенос:
Матрица трехмерного переноса представлена в виде:
 ,
тогда
,
тогда![]() .
.
dx- значение переноса относительно оси OX.
dy- значение переноса относительно оси OY.
dz- значение переноса относительно оси OZ.
Масштабирование:
Матрица трехмерного масштабирования представлена в виде:
 ,
тогда
,
тогда
![]() .
.
sx- коэффициент масштабирования относительно оси OX.
sy- коэффициент масштабирования относительно оси OY.
sz- коэффициент масштабирования относительно оси OZ.
Поворот:
Матрица
трехмерного поворота вокруг оси
![]() представлена в виде:
представлена в виде:
 ,
тогда
,
тогда
![]() .
.
Матрица
трехмерного поворота вокруг оси
![]() представлена в виде:
представлена в виде:
 ,
тогда
,
тогда
![]() .
.
Матрица
трехмерного поворота вокруг оси
![]() представлена
в виде:
представлена
в виде:
 ,
тогда
,
тогда
![]() .
.
Для извлечения новых координат точки после преобразования достаточно считать из матрицы три значения координат в последней строке.
В программе функция перемножения матриц является универсальной. Все зависит от того, какое преобразование нужно сделать с объектом (перенос, масштабирование или поворот). Она возвращает уже преобразованную матрицу точки C (объект перенесли, масштабировали или повернули):
public static Matrix Multiply(Matrix A, Matrix B)
{
Matrix C = new Matrix(A.Rows, B.Columns);
for (int i = 0; i < A.Rows; i++)
{
for (int j = 0; j < B.Columns; j++)
{
double tmp = C[i, j];
for (int k = 0; k < B.Rows; k++)
{
tmp += A[i, k] * B[k, j];
}
C[i, j] = tmp;
}
}
return C;
}
Эта же функцию я использую и при видовом преобразовании, тогда первым параметром является матрица видового преобразования, а вторым матрица собственно трехмерного преобразования.