

4.11. Тахогенератори
Загальні відомості. Тахогенераторами називаються електричні машини, що служать для перетворення механічного переміщення валу в електричний сигнал — вихідну напругу. Закон перетворення механічної величини в електричну визначається статичною характеристикою тахогенератора. Рівняння статичної характеристики ідеального тахогенератора має наступний вигляд:
 (4.37)
(4.37)
де ω — кутова швидкість валу; α — кут повороту валу.
По роду струму тахогенератори підрозділяються на тахогенератори постійного і змінного струму. До тахогенераторів пред'являються наступні основні вимоги:
лінійність вихідної характеристики;
велика крутизна вихідної характеристики;
мала амплітудна погрішність;
мала фазова погрішність (для тахогенераторів змінного струму);
мінімальна пульсація вихідної напруги (для тахогенераторів постійного струму);
малий момент інерції ротора і мала електромагнітна постійна часу;
стабільність вихідної характеристики;
малі маса і габарити.
У суднових системах контролю і регулювання тахогенератори застосовуються для вимірювання частоти обертання гребних валів, головних і допоміжних силових двигунів, а також для здійснення зворотного зв'язку по частоті обертання і для введення сигналу по похідній від кута повороту в автоматичних системах регулювання.
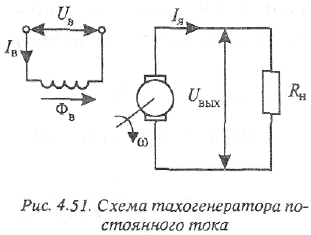
Тахогенератори постійного струму. Тахогенератори постійного струму є генераторами постійного струму невеликої потужності з електромагнітним (рис. 4.51) або магнітоелектричним збудженням.
У режимі холостого ходу при постійному магнітному потоці збудження Фв вихідна напруга тахогенератора рівна ЕРС:
![]()
 (4.38)
(4.38)
де к = сФв.
Статична характеристика 1, відповідна режиму холостого ходу (Rн = ∞), показана на рис. 4.52. При підключенні навантаження напруга зменшується на величину падіння напруги в ланцюзі якоря:
![]()
де Iя = Uвых/RH; RH – опір навантаження; R – опір ланцюга якоря, рівний сумі опорів обмотки якоря Rя і переходу щітки — колектор Rщ,
З урахуванням (4.38) одержимо рівняння для вихідної напруги
 (4.39)
(4.39)
Із рівняння (4.39) видно, що вихідна напруга змінюється по лінійному закону у функції частоти обертання ω. Нахил вихідної характеристики залежить від опору навантаження (порівняти криві 2, 3 на рис. 4.52). Зменшення опору навантаження (Rн2 < Rн1) призводить до зменшення крутизни вихідної характеристики.
Рівняння (4.39) одержане без урахування впливу реакції якоря і постійної величини падіння напруги на переході щітки — колектор. З урахуванням реакції якоря результуючий магнітний потік
Ф = Фв - Фр,
д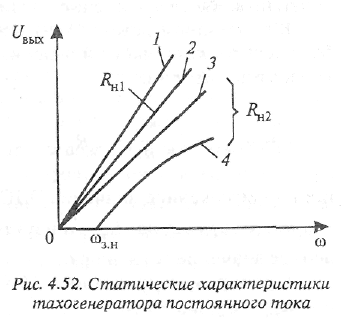 е
Фр — потік реакції якоря.
е
Фр — потік реакції якоря.
Потік реакції якоря змінюється пропорційно струму Iя, тому
ЕРС тахогенератора при навантаженні визначається виразом

Для графітних щіток постійним слід рахувати не опір переходу щітки — колектор R , а падіння напруги U на ньому. Вихідна напруга тахогенератора при навантаженні визначається рівнянням
![]() (4.41)
(4.41)
Перетворюючи рівняння (4.41) з урахуванням (4.40), одержимо
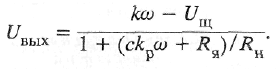
З одержаного виразу видно, що статична характеристика є нелінійною і має зону нечутливості від ω = 0 до ωЗ.Н (див. рис. 4.52). Нелінійність вихідної характеристики 4 пояснюється впливом реакції якоря. Відхилення вихідної характеристики від лінійного закону збільшується із зростанням кутової швидкості з і зменшенням опору навантаження. Для зменшення нелінійності вихідної характеристики слід використовувати невеликий діапазон частоти обертання і навантажувати тахогенератор великим опором. Зона нечутливості з'являється за рахунок падіння напруг на переході щітки — колектор. У зоні нечутливості ЕРС тахогенератора менше падіння напруги на переході щітки — колектор (kω < Uщ), тому вихідна напруга рівна нулю. Для зменшення зони нечутливості в тахогенераторах встановлюють мідно-графітні або срібно-графітні щітки.
У тахогенераторах з електромагнітним збудженням зміна "температури навколишнього середовища призводить до зміни опору обмотки збудження і, отже, струму збудження. Для зменшення температурної погрішності магнітну систему тахогенератора роблять насиченою і робочу крапку вибирають за коліном кривої намагнічування. В цьому випадку зміна струму збудження майже не впливає на значення магнітного потоку тахогенератора.
У перехідному режимі рівняння для ланцюга якоря тахогенератора без урахування реакції якоря і падіння напруги на переході щітки — колектор має вигляд
 (4.42)
(4.42)
де е — миттєве значення ЕРС; uВЫХ — миттєве значення вихідної напруги; LЯ — індуктивність обмотки якоря; iЯ — миттєве значення струму якоря.
Перетворюючи рівняння (4.42) з урахуванням (4.38) і рівність iЯ = uвых/Rн, одержимо

Введемо позначення:
 —
електромагнітна постійна часу ланцюга
якоря;
—
електромагнітна постійна часу ланцюга
якоря;
 —
статичний коефіцієнт посилення по
напрузі.
—
статичний коефіцієнт посилення по
напрузі.
З урахуванням цих позначень запишемо
або

З рівнянь видно, що якщо вхідною величиною є кутова швидкість якоря, то тахогенератор є аперіодичною ланкою першого порядку, якщо ж вхідною величиною є кут повороту, то тахогенератор є реальною диференцюючою ланкою.
Основні переваги тахогенератора постійного струму полягають у відсутності фазових погрішностей і високої чутливості. До недоліків тахогенератора відносяться наявність щіток і колектора, які приводять до зниження надійності, а також пульсації вихідної напруги і радіоперешкоди.
Асинхронний тахогенератор. Конструкція асинхронного тахогенератора не відрізняється від конструкції двофазного асинхронного виконавчого двигуна з порожнистим ротором. Порожнистий ротор тахогенератора виконується з високоомних матеріалів (константану, манганіну і ін.), опір яких мало змінюється під впливом температури. На статорі є дві обмотки, здвинуті в просторі на 90° (рис. 4.53). На обмотку збудження ОЗ подається напруга UB від мережі змінного струму. З генераторної обмотки ОГ знімається вихідний сигнал. Обмотка збудження створює пульсуючий магнітний потік Фв, направлений по подовжній осі машини. При нерухомому роторі магнітний потік ФB наводитиме трансформаторну ЕРС ЕТР в порожнистому роторі як у вторинній обмотці трансформатора. Порожнистий ротор можна вважати таким, що складається з елементарних провідників, замкнутих накоротко на торцях. Контури струмів, обумовлених трансформаторною ЕДС, розташовуються в площинах, перпендикулярних подовжній осі машини (рис. 4.53, а). Ці струми створюють магнітний потік Фd1, направлений, згідно правилу Лінь, назустріч магнітному потоку Фв. Теоретично в результаті взаємодії магнітних потоків при нерухомому роторі (ω = 0) у тахогенераторі створюється магнітний потік Фd, направлений по подовжній осі, тому в генераторній обмотці, розташованій по поперечній осі, ЕРС наводитися не буде (Евыx = 0). Проте через несиметрію магнітного ланцюгу, несиметрію порожнистого ротор, а також неточність зрушення обмоток в просторі на виході тахогенератора є невелика напруга, звана залишковою.

При обертанні ротора (ω ≠ 0) в його елементарних провідниках наводиться ЕРС обертання ЕBP , рівна
![]()
де k1 — коефіцієнт, залежний від конструктивних параметрів тахогенератора.
Під дією ЕРС обертання по ротору протікають струми I, контури яких при великому активному опорі ротора розташовуються в площинах, паралельних подовжній осі (рис. 4.53, б). Ці струми створюють магнітний потік Фq, направлений по поперечній осі. Оскільки струми IBP пропорційні ЕРС ЕBP, то і магнітний потік Фq змінюється пропорційно частоті обертання ротора ω:
Фq = k2ω. (4.43)
Частота пульсації потоку Фq співпадає з частотою напруги обмотки збудження. Магнітний потік Фq наводить в генераторній обмотці вихідну ЕРС ЕВИХ, діюче значення якої визначається рівнянням
![]() (4.44)
(4.44)
де ωΓ.Е — ефективне число витків генераторної обмотки; Фqm – амплітудне значення потоку по поперечній осі.
З урахуванням (4.43) вираз (4.44) перетвориться до вигляду
де Кг = 4,44ωГ.Э f k2 ; α — кут повороту ротора.
Частота вихідний ЕРС рівна частоті напруги збудження і не залежить від частоти обертання ротора. Одержаний вираз справедливий при незалежності потоку Фd від частоти обертання ротора. Насправді магнітний потік Фd із зростанням частоти обертання ω зменшується. Це пояснюється тим, що під дією магнітного потоку Фq в елементарних провідниках ротора наводиться додаткова ЕРС обертання ЕВР.Д, напрям якої співпадає з напрямом ЕТР . Оскільки потік Фq зраджується пропорційно частоті обертання, то додаткова ЕРС ЕВР.Д змінюється пропорційно квадрату цієї частоти. Струм в роторі, створений ЕРС ЕВР.Д, викликає зменшення потоку по подовжній осі Фd.
Вихідна напруга тахогенератора буде менше вихідний ЕРС EВЫХ на величину падіння напруги на опорі генераторної обмотки ZГ:

де Iг — струм, що виникає в генераторній обмотці при її замиканні на опір навантаження ZH. Струм Iг створює потік Фг, направлений назустріч потоку Фq . З урахуванням вказаних фізичних процесів вихідна характеристика асинхронного тахогенератора має наступний вигляд:
 (4.45)
(4.45)
де kт = wГ.Э /wВ.Э — коефіцієнт трансформації обмоток тахогенератора; wВ.Э — ефективне число витків обмотки збудження; ν=ω/ω0 — відносна частота обертання ротора; ω0 — синхронна частота обертання; А і В — комплексні коефіцієнти, залежні від параметрів схеми заміщення тахогенератора до навантаження.
Як видно з виразу (4.45), вихідна напруга Uвых не є лінійною функцією частоти обертання ротора і залежить від навантаження (рис. 4.54). Для ідеального тахогенератора, що не має швидкісною амплітудної і фазової погрішностей, рівняння вихідної характеристики можна одержати з (4.45) при В = 0:
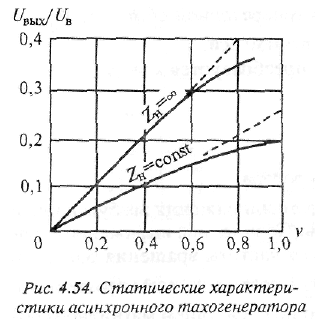
Порівняння (4.46) і (4.45) дозволяє визначити амплітудну і фазові погрішності тахогенератора. Для зменшення швидкісних погрішностей вибирають тахогенератори з такою синхронною частотою обертання, при якій значення відносної частоти обертання ротора не перевищує 0,3, оскільки вихідна характеристика на ділянці ν = 0 — 0,3 практично лінійна.
Без урахування навантаження
Якщо за вхідну величину прийнята частота обертання ротора, то тахогенератор є безінерційною ланкою з передавальною функцією
![]()
Якщо за вихідну величину прийнятий кут повороту ротора, то тахогенератор є ідеальною диференцюючою ланкою з передавальною функцією
![]()
У авторульовому асинхронний тахогенератор використовується як диференціююча ланка, вхідною величиною якого є кут відхилення судна від заданого курсу.