

Экзамен / тмм - экзамен(и задачи) / ТММ Экзамен! / Лекции / шпоры динамика / 18
.doc8.2. Уравнения движения машины. Режимы движения
Уравнения движения машинного агрегата с одной степенью подвижности, механическая система которого состоит из механизмов с жесткими звеньями и идеальными кинематическими парами, включают уравнение движения механической системы, полученное, например, в форме уравнения Лагранжа второго рода, и характеристики двигателя. Если при этом выбирается идеальная кинематическая характеристика в форме (8.6), то при заданном законе изменения входного параметра u(t) закон изменения угловой скорости двигателя, а следовательно, и закон движения ротора определяется по этой характеристике:
![]() ,
,
 , (8.13)
, (8.13)
а уравнение Лагранжа может быть использовано для определения движущего момента:
![]() .
(8.14)
.
(8.14)
Иными словами, в этом случае мы приходим к задаче исследования динамики механической системы при заданном законе движения входного звена, решение которой методом кинетостатики рассматривалось в главах 4 и 5. Такая постановка задачи исследования динамики машинного агрегата приемлема, если двигатель обладает жесткой характеристикой. Для двигателя с мягкой характеристикой приближенное исследование движения машины может производиться по идеальной силовой характеристике (8.7). В этом случае обобщенная движущая сила определяется по характеристике двигателя
![]() , (8.15)
, (8.15)
а закон движения машины может быть найден интегрированием уравнения
![]() , (8.16)
, (8.16)
полученного подстановкой (8.15) в уравнение Лагранжа второго рода.
Использование идеальных характеристик является приемлемым, как правило, на ранних стадиях проектирования машинного агрегата; более точный динамический анализ требует учета зависимости закона движения от нагрузки, отражаемыми статическими и динамическими характеристиками. При использовании статической характеристики приходим к дифференциальному уравнению движения
![]() , (8.17)
, (8.17)
получаемому подстановкой
(8.9) в уравнение Лагранжа. Это нелинейное
уравнение второго порядка, которое
может быть проинтегрировано при заданном
законе
![]() и заданных начальных или граничных
условиях.
и заданных начальных или граничных
условиях.
При
учете динамической характеристика
двигателя задача сводится к интегрированию
системы двух дифференциальных уравнений
с двумя неизвестными
![]() и
и
![]() .
.
Режимы движения машины. Исследование динамики машинного агрегата сводится обычно к определению и анализу некоторых частных решений дифференциальных уравнений движения, соответствующих наиболее характерным режимам.
а). Установившееся движение. Установившийся режим характерен для машин, работающих при постоянной нагрузке, а также для цикловых машин, выполняющих циклически повторяющийся процесс. Обычно в установившемся режиме входной параметр является постоянной величиной
![]() . (8.18)
. (8.18)
При
этом в машине с роторным двигателем
устанавливается периодическое движение,
при котором угловая скорость ротора
остается близкой к некоторому среднему
значению
![]() :
:
![]() , (8.19)
, (8.19)
причем
![]() .
Отклонение
.
Отклонение
![]() скорости вращения ротора от средней
скорости называется динамической
ошибкой по скорости. Режим, удовлетворяющий
условиям (8.18) и (8.19), мы и будем в дальнейшем
называть установившемся движением
машины.
скорости вращения ротора от средней
скорости называется динамической
ошибкой по скорости. Режим, удовлетворяющий
условиям (8.18) и (8.19), мы и будем в дальнейшем
называть установившемся движением
машины.
б).
Переходные процессы. К переходным
процессам относят процессы разбега,
выбега машины и переходный процесс при
изменении нагрузки. Процессу разбега
соответствует решение
![]() уравнений движения, удовлетворяющее
начальным условиям
уравнений движения, удовлетворяющее
начальным условиям
![]() ;
в процессе разбега происходит переход
машины от состояния покоя к установившемуся
движению. Разбег называется неуправляемым,
если
;
в процессе разбега происходит переход
машины от состояния покоя к установившемуся
движению. Разбег называется неуправляемым,
если
![]() ;
при управляемом разбеге происходит
плавное нарастание величины
;
при управляемом разбеге происходит
плавное нарастание величины
![]() от нулевого значения до
от нулевого значения до
![]() .
.
Выбегом машины называется процесс перехода от установившегося движения к состоянию покоя. При свободном выбеге двигатель отключается, остановка машины происходит за счет сил сопротивления. В режиме торможения при отключении двигателя создается дополнительный тормозной момент, ускоряющий процесс выбега. При динамическом торможении кинетическая энергия машины рекуперируется, то есть возвращается тем или иным способом источнику энергии.
Часто в связи с изменением характеристик рабочего процесса в машине осуществляется переход от одного установившегося режима к другому. При этом происходит переходный процесс, связанный с изменением нагрузки.
8.3. Определение средней угловой скорости
установившегося движения цикловой машины
Исследуем
установившееся движение машины, учитывая
статическую характеристику двигателя.
Уравнение движения получаем подстановкой
![]() в уравнение (8.17):
в уравнение (8.17):
![]() . (8.20)
. (8.20)
Периодическое решение этого уравнения будем искать в форме, соответствующей (8.19):
![]() . (8.21)
. (8.21)
Выделим
средние значения
![]() ,
,
![]() :
:
![]() ,
,
![]() . (8.22)
. (8.22)
Подставим (8.22) в (8.20), перенесем слагаемые, зависящие от q в правую часть уравнения:
 . (8.23)
. (8.23)
Влияние
статической характеристики двигателя
проявляется двояким образом. Во-первых,
средняя угловая скорость ротора уже не
определяется только значением входного
параметра, а зависит от нагрузки;
во-вторых, переменные силы, возникающие
в механической системе и определяющие
внутреннюю виброактивность механизма,
приводят к колебаниям угловой скорости
двигателя. Легко видеть, что колебательные
процессы обусловлены наличием в уравнении
(8.23) членов, явно зависящих от q
и расположенных в его правой части.
Полагая, что колебания угловой скорости
являются малыми, (![]() ),
можно искать решение уравнения (8.23)
методом последовательных приближений,
причем в качестве исходного «нулевого»
приближения выбрать решение вида
),
можно искать решение уравнения (8.23)
методом последовательных приближений,
причем в качестве исходного «нулевого»
приближения выбрать решение вида
![]() , (8.24)
, (8.24)
удовлетворяющее уравнению
![]() . (8.25)
. (8.25)
Подставляя
(8.24) в (8.25), получаем уравнение, из которого
можно определить
![]() :
:
![]() . (8.26)
. (8.26)
Это уравнение имеет простой физический
смысл: оно означает, что в системе
устанавливается такая угловая скорость
вращения ротора двигателя, при ко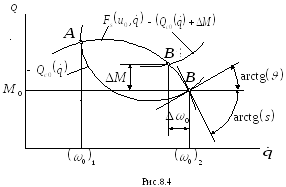 торой
средний момент движущих сил
торой
средний момент движущих сил
![]() оказывается равным среднему моменту
сил сопротивления
оказывается равным среднему моменту
сил сопротивления
![]() .
Уравнение (8.26) можно решать графически,
определяя точки пересечения графиков
.
Уравнение (8.26) можно решать графически,
определяя точки пересечения графиков
![]() и
и
![]() (рис.8.4). Как видно из рисунка, точек
пересечения может быть несколько, что
соответствует нескольким решениям
уравнения (8.26). Реализуемым установившемся
движениям соответствуют только
устойчивые решения уравнения (8.25).
Для выявления таких решений составим
уравнения в вариациях для решения
(8.24). Линеаризуем
(рис.8.4). Как видно из рисунка, точек
пересечения может быть несколько, что
соответствует нескольким решениям
уравнения (8.26). Реализуемым установившемся
движениям соответствуют только
устойчивые решения уравнения (8.25).
Для выявления таких решений составим
уравнения в вариациях для решения
(8.24). Линеаризуем
![]() и
и
![]() в окрестности
в окрестности
![]() :
:
 ,
,
 .
.
Полагая,
что
![]() ,
подставляем эти выражения в (8.25):
,
подставляем эти выражения в (8.25):
 . (8.27)
. (8.27)
В
соответствии с (8.10)
 ,
где s – крутизна
статической характеристики двигателя.
По аналогии введем величину
,
где s – крутизна
статической характеристики двигателя.
По аналогии введем величину
 , (8.28)
, (8.28)
которую назовем крутизной среднего момента сил сопротивления. Учитывая (8.26) из (8.27) получаем:
![]() .
.
Рассматриваемое
установившееся движение является
устойчивым, если общее решение этого
уравнения
![]() стремится к нулю с ростом t.
Величину
стремится к нулю с ростом t.
Величину
 назовем механической постоянной
времени машины.
назовем механической постоянной
времени машины.
Отсюда находим условия устойчивости рассматриваемого решения:
![]() или
или
![]() . (8.29)
. (8.29)
Пользуясь этим условием, легко определить, что решение, соответствующее точке А на рис.8.4, является неустойчивым, а точке В – устойчивым.
Предположим,
что вследствие изменения параметров
рабочего процесса или других сил
сопротивления средний момент
![]() получил некоторое приращение
получил некоторое приращение
![]() (см.
рис.8.4). При этом точка B
пересечения графиков перейдет в
(см.
рис.8.4). При этом точка B
пересечения графиков перейдет в
![]() ;
тем самым средняя угловая скорость
изменится и станет равной
;
тем самым средняя угловая скорость
изменится и станет равной
![]() .
С точностью до малых величин второго
порядка
.
С точностью до малых величин второго
порядка
![]() и
и
![]() вблизи точки В можно заменить
касательными к ним. При этом имеем
вблизи точки В можно заменить
касательными к ним. При этом имеем
![]() .
.
Величину
![]() (8.30)
(8.30)
будем называть коэффициентом чувствительности или просто чувствительностью исследуемого режима к изменению нагрузки.
Чувствительность является важной характеристикой установившегося режима движения. При большой чувствительности средняя угловая скорость может резко измениться даже при слабых увеличениях нагрузки, неизбежных в реальных условиях эксплуатации машины. В таких случаях надо предпринимать меры для снижения чувствительности. Одной из таких мер является введение регулятора скорости, обеспечивающего увеличение входного параметра при увеличении нагрузки, то есть переводящего двигатель на другую рабочую характеристику, при которой увеличенной нагрузке соответствует прежняя величина средней угловой скорости.
Регулятор
скорости реализует управление движением
машины по принципу обратной связи; с
этой целью чаще всего на роторе двигателя
устанавливается датчик, измеряющий его
среднюю угловую скорость
![]() ;
если она оказывается ниже номинальной
;
если она оказывается ниже номинальной
![]() ,
в регуляторе создается сигнал
,
в регуляторе создается сигнал
![]() ,
пропорциональный разности
,
пропорциональный разности
![]() и увеличивающий значение входного
параметра; при
и увеличивающий значение входного
параметра; при
![]() формируется отрицательный сигнал
формируется отрицательный сигнал
![]() .
Такая система стабилизации угловой
скорости называется тахометрической
отрицательной обратной связью.
.
Такая система стабилизации угловой
скорости называется тахометрической
отрицательной обратной связью.
Другой способ понижения чувствительности состоит в использовании коробки скоростей или вариатора – передаточного механизма с изменяемым передаточным отношением. При увеличении нагрузки в исполнительном механизме передаточное отношение увеличивается (оператором, работающем на машине, или автоматически); тем самым величина среднего момента сил сопротивления, приведенного к выходному валу двигателя, снижается до прежней величины.