

Экзамен / тмм - экзамен(и задачи) / ТММ Экзамен! / Лекции / шпоры динамика / 13
.docВнешняя виброактивность вращающегося ротора
и роторной машины
Существует множество
машин, в которых единственным подвижным
звеном является ротор, совершающий
вращательное движение. К ним относятся
роторные электродвигатели, насосы,
центробежные компрессоры, турбины,
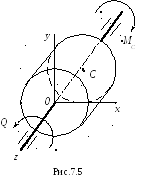
центрифуги. Исследуем внешнюю
виброактивность ротора (рис.7.5),
рассматриваемого как абсолютно твердое
тело. Пусть к ротору приложены движущий
момент Q и момент сил
сопротивления МС; ротор
вращается с угловой скоростью
и угловым ускорением .
Введем систему координат 0хyz,
связанную с ротором. Проецируя уравнения
(7.12) на эти оси, учитывая, что в
рассматриваемом случае
![]() = 0,
= 0,
![]()
![]()
![]() и используя выражения (4.20) и (4.21), находим
и используя выражения (4.20) и (4.21), находим
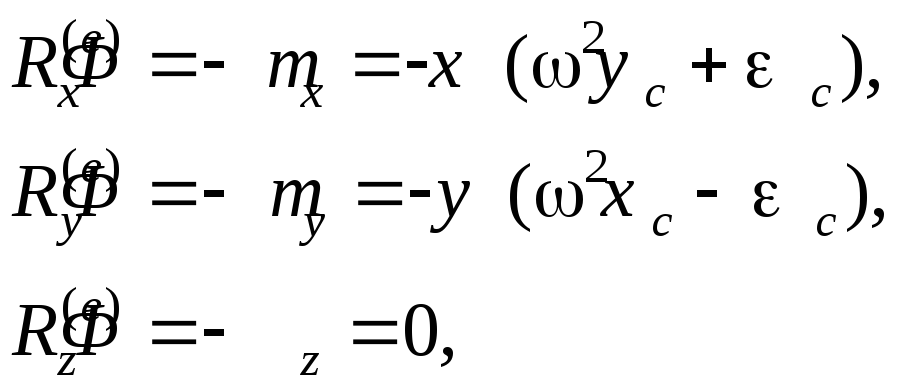 (7.16)
(7.16)
 (7.17)
(7.17)
![]() (7.18)
(7.18)
Здесь
хс и yc
– координаты центра масс ротора с.
В выражения 7.16 не вошла сила тяжести
ротора: она создает постоянные по
величине реакции в опорах, которые могут
быть определены из уравнений статики
и добавлены к динамическим реакциям1
. Из соотношений (7.16) следует, что первое
условие уравновешенности
![]() =
0 будет выполнено при любых
и в том и только
том случае, если
=
0 будет выполнено при любых
и в том и только
том случае, если
xc = yc = 0 , (7.19)
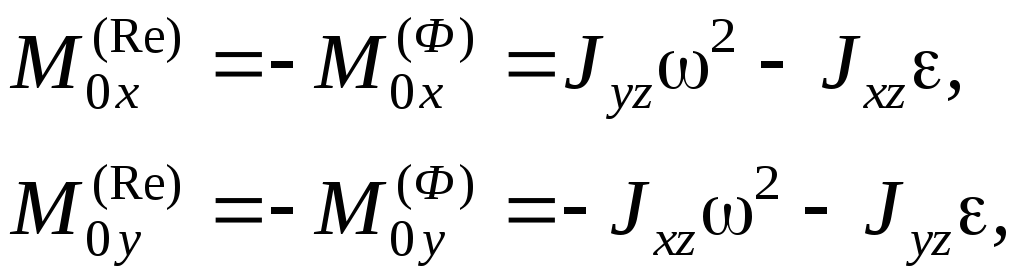
т.е. если центр масс ротора лежит на оси вращения. При выполнении этого условия ротор называется статически уравновешенным. Из выражений (7.17) вытекает, что жесткий ротор не создает динамических моментов относительно осей 0х и 0y при любых и в том и только том случае, если
Jxz = Jyz = 0, (7.20)
т.е. если ось z является главной осью инерции ротора. При выполнении условий (7.19) и (7.20), т.е. если ось вращения является главной центральной осью инерции, ротор называется динамически уравновешенным.
Сравнивая
(7.18) с уравнением движения вращающегося
ротора
![]() легко заметить, что при любом законе
движения
легко заметить, что при любом законе
движения
![]() :
реакции в опорах вращающегося ротора
не могут создавать момент относительно
оси вращения. Этот вывод получен в
предположении, что силы трения, возникающие
в опорах ротора, отнесены к активным
силам.
:
реакции в опорах вращающегося ротора
не могут создавать момент относительно
оси вращения. Этот вывод получен в
предположении, что силы трения, возникающие
в опорах ротора, отнесены к активным
силам.
Предположим теперь, что как движущий момент, так и силы сопротивления, создающие момент МC, являются для машины в целом внутренними силами. (К внутренним силам относятся, в частности, и силы трения в опорах.) В таком случае, рассматривая виброактивность роторной машины, нужно исключить из выражения (7.18) активные силы; в результате получаем:
![]()
![]() (7.21)
(7.21)
Таким образом, воздействие на основание роторной машины с динамически уравновешенным ротором и внутренними активными силами сводится к моменту (7.21). При равномерном вращении ротора воздействие равно нулю; момент относительно оси вращения возникает при разбеге и выбеге машины, а также при неравномерном вращении ротора. Ниже будет показано, что неравномерное вращение ротора двигателя возникает, в частности, при установившемся движении цикловой машины: оно вызывается внутренней виброактивностью механической системы. При этом воздействие машины на основание носит колебательный характер и может вызывать весьма существенные вибрации фундамента машины издания, в котором она установлена.
Р ассмотрим
характерный пример, иллюстрирующий
сказанное выше. На рис.7.6 приведена схема
вырубного пресса. Пуансон 1 приводится
в движение от двигателя 2, установленного
на корпусе, через двухступенчатую
зубчатую передачу и рычажный механизм.
В момент вырубки детали из заготовки 3
происходит удар, возникают весьма
большие силы
ассмотрим
характерный пример, иллюстрирующий
сказанное выше. На рис.7.6 приведена схема
вырубного пресса. Пуансон 1 приводится
в движение от двигателя 2, установленного
на корпусе, через двухступенчатую
зубчатую передачу и рычажный механизм.
В момент вырубки детали из заготовки 3
происходит удар, возникают весьма
большие силы
![]() и
и
![]() ,
действующие на пуансон и на матрицу 4.
Эти силы являются для машины в целом
внутренними силами, поэтому на основание
они не действуют. Однако в момент удара
происходит резкое уменьшение скорости
пуансона, а вследствие этого и всех
звеньев жесткого механизма, включая
ротор двигателя, обычно обладающий
большим моментом инерции J.
Возникает переменный инерционный момент
J,
воздействующий на основание пресса.
Частота этого воздействия определяется
числом циклов машины в единицу времени.
,
действующие на пуансон и на матрицу 4.
Эти силы являются для машины в целом
внутренними силами, поэтому на основание
они не действуют. Однако в момент удара
происходит резкое уменьшение скорости
пуансона, а вследствие этого и всех
звеньев жесткого механизма, включая
ротор двигателя, обычно обладающий
большим моментом инерции J.
Возникает переменный инерционный момент
J,
воздействующий на основание пресса.
Частота этого воздействия определяется
числом циклов машины в единицу времени.
На рис.
7.7, а показана схема двухроторной
машины. Если оба ротора динамически
уравновешены, а моменты Q
и MС являются внутренними
для машины обобщенными силами, то
воздействие машины на основание (внешняя
виброактивность) сводится к моменту
![]() где i – передаточное
отношение передачи, связывающей оба
ротора. При
где i – передаточное
отношение передачи, связывающей оба
ротора. При
![]() машина
является полностью уравновешенной. Еще
раз подчеркнем, что уравновешенность
нарушается, если хотя бы одна из активных
обобщенных сил становится внешней. Так,
например, если ротор 2 на рис.7.7, а
является ротором вентилятора, а момент
MС создается
аэродинамическими силами, на корпус
машины б
машина
является полностью уравновешенной. Еще
раз подчеркнем, что уравновешенность
нарушается, если хотя бы одна из активных
обобщенных сил становится внешней. Так,
например, если ротор 2 на рис.7.7, а
является ротором вентилятора, а момент
MС создается
аэродинамическими силами, на корпус
машины б удет
действовать момент МС. В
двухроторной машине, схема которой
показана на рис.7.7, б, оба ротора
вращаются в одном направлении; поэтому
инерционные моменты
удет
действовать момент МС. В
двухроторной машине, схема которой
показана на рис.7.7, б, оба ротора
вращаются в одном направлении; поэтому
инерционные моменты
![]() и
и
![]() в
этом случае складываются, и при ускоренном
движении уравновешенность не может
быть достигнута.
в
этом случае складываются, и при ускоренном
движении уравновешенность не может
быть достигнута.
7.5. Уравновешивание роторов
В современных машинах угловые скорости роторов достигают 10000 с-1 и более, а скорости порядка 300 – 600 с-1 являются обычными. При таких скоростях неуравновешенность ротора, как статическая, так и динамическая приводит к весьма большим реакциям в опорах. Так, например, смещение центра масс ротора относительно оси вращения на 1 мм при угловой скорости в 1000 с-1 создает динамическую нагрузку на опоры, в 100 раз превышающую силу тяжести ротора. Естественно, что проблема уравновешивания роторов является одной из кардинальных проблем машиностроения.
Подход к задаче уравновешивания ротора зависит от выбора его динамической модели. Различают жесткие роторы, которые могут рассматриваться как абсолютно твердые, упругие роторы, деформируемость которых должна учитываться при уравновешивании, и гибкие роторы, скорость вращения которых превосходит некоторое критическое значение. Выбор той или иной динамической модели зависит от скорости вращения и от требуемой точности уравновешивания. Операцию уравновешивания роторов часто называют балансировкой, а устройства, на которых осуществляется балансировка, – балансировочными станками.
Уравновешивание жесткого ротора. При статической балансировке жесткого ротора добиваются выполнения условий (7.19). Для этого ротор устанавливают на опоры, представляющие собой призматические линейки (рис. 7.8). Установкой балансировочного груза mb выводят центр масс ротора на ось вращения, добиваясь того, чтобы ротор, установленный в любое начальное положение и отпущенный без начальной скорости, не катился по призматическим опорам.
Т очность
статической балансировки зависит от
коэффициента трения качения k
цапф ротора по призмам. Пусть m
– масса ротора, е – расстояние от
его центра масс до оси вращения. Тогда
наибольший движущий момент, принуждающий
ротор катиться по призмам, равен mge.
Качение произойдет, если этот момент
будет больше момента трения качения,
равного mgk.
Неуравновешенность не будет обнаруживаться,
если e
k; остаточная
несбалансированность ротора определяется
моментом массы: me
mk.
очность
статической балансировки зависит от
коэффициента трения качения k
цапф ротора по призмам. Пусть m
– масса ротора, е – расстояние от
его центра масс до оси вращения. Тогда
наибольший движущий момент, принуждающий
ротор катиться по призмам, равен mge.
Качение произойдет, если этот момент
будет больше момента трения качения,
равного mgk.
Неуравновешенность не будет обнаруживаться,
если e
k; остаточная
несбалансированность ротора определяется
моментом массы: me
mk.
Динамическая балансировка ротора, направленная на выполнение условий (7.19) и (7.20), может быть произведена двумя балансировочными массами, устанавливаемыми в двух произвольно выбранных плоскостях, перпендикулярных оси вращения и называемых плоскостями исправления.
Пусть z1 и z2 – координаты плоскостей исправления (рис.7.9), m1 и m2 – массы балансировочных грузов, x1, y1, x2, y2 – их координаты в плоскостях исправления (система 0xyz связана с ротором); m – масса ротора, xc, yc – координаты его центра масс. Тогда условия ( 7.19) будут выполнены, если
 (7.22)
(7.22)
Условия
(7.22) означают, что центр масс системы,
состоящий из ротора и балансировочных
масс, лежит на оси вращения. Составим
выражения для центробежных моментов
инерции
![]() и
и
![]() той же системы и приравняем их нулю:
той же системы и приравняем их нулю:
 (7.23)
(7.23)
При
выполнении этих условий отбалансированный
ротор будет динамически уравновешенным.
Таким образом, необходимо определить
из уравнений (7.22) и (7.23) массы грузов m1,
m2 и их координаты x1,
y1, x2,
y2. Поскольку
число неизвестных превышает число
уравнений, нужно дополнительно задать
два условия, в качестве которых можно
выбрать значения радиусов
![]() и
и
![]() ,
и искать углы 1,
2,
(см. рис.7.9) и значения m1,
m2.
,
и искать углы 1,
2,
(см. рис.7.9) и значения m1,
m2.
1 Момент силы тяжести относительно оси х является постоянным; момент относительно оси z может считаться включенным в момент сил сопротивления МC, входящий в уравнение (7.18).