

Экзамен / тмм - экзамен(и задачи) / ТММ Экзамен! / Лекции / шпоры динамика / 14
.docУравнения Лагранжа второго рода
для механизма с одной степенью подвижности
До сих пор предполагалось, что закон движения механизма является известным: считалось, что он совпадает с программным законом движения, необходимым для выполнения рабочего процесса. В реальной машине закон движения отличается от программного. Это отличие в первую очередь связано со свойствами двигателя, приводящего в движение машину и создающего движущие силы, прикладываемые к входным звеньям. Скорость на выходном звене двигателя зависит от величины обобщенной движущей силы, и это обстоятельство должно учитываться при проектировании машины. В этой связи возникает задача интегрирования системы дифференциальных уравнений движения механической системы совместно с характеристикой двигателя. При этом дифференциальные уравнения движения механизма обычно принимаются в форме уравнений Лагранжа второго рода.
Уравнение Лагранжа второго рода для механической системы (в данном случае – механизма) было получено в курсе теоретической механики:
 ,
(6.1)
,
(6.1)
где Т(q,![]() )
– кинетическая энергия механизма,
представленная как функция от обобщенной
координаты и обобщенной скорости; Q
– обобщенная движущая сила;
)
– кинетическая энергия механизма,
представленная как функция от обобщенной
координаты и обобщенной скорости; Q
– обобщенная движущая сила;
 (6.2)
(6.2)
– обобщенная сила сопротивления, соответствующие всем активным силам, кроме движущих.
В механизме с одной степенью подвижности кинетическая энергия всегда может быть представлена в форме
![]() (6.3)
(6.3)
Если
q – линейная обобщенная
координата, то инерционный коэффициент
![]() называется приведенной массой
механизма; при угловой обобщенной
координате
называется приведенной массой
механизма; при угловой обобщенной
координате
![]() имеет размерность момента инерции и
называется приведенным моментом
инерции. В дальнейшем будет
предполагаться, что q
– угловая координата, и выражение (6.3)
записывается в форме
имеет размерность момента инерции и
называется приведенным моментом
инерции. В дальнейшем будет
предполагаться, что q
– угловая координата, и выражение (6.3)
записывается в форме
![]() (6.4)
(6.4)
где
J(q)
– приведенный момент инерции. Подставляя
(6.4) в (6.1) и учитывая, что

 получаем
получаем
![]() (6.5)
(6.5)
П ерейдем
к примерам составления уравнений
движения механизмов. Рассмотрим
кривошипно-ползунный механизм, показанный
на рис.6.1.
ерейдем
к примерам составления уравнений
движения механизмов. Рассмотрим
кривошипно-ползунный механизм, показанный
на рис.6.1.
Кинетическую
энергию механизма определяем как сумму
кинетических энергий его подвижных
звеньев. Для вращающегося звена 1
имеем
![]()
где J10
– момент инерции звена относительно
оси вращения. Для поступательно
движущегося ползуна 3 получаем
![]() Для звена 2, совершающего сложное
движение, находим кинетическую энергию,
пользуясь теоремой Кенига, известной
из курса теоретической механики:
Для звена 2, совершающего сложное
движение, находим кинетическую энергию,
пользуясь теоремой Кенига, известной
из курса теоретической механики:
![]() где m2 –
масса звена,
где m2 –
масса звена,
![]() - его момент инерции относительно оси,
проходящей через центр масс С2
и перпендикулярной плоскости движения;
vC2
– скорость центра масс; 2
– угловая скорость. Таким образом,
учитывая, что
- его момент инерции относительно оси,
проходящей через центр масс С2
и перпендикулярной плоскости движения;
vC2
– скорость центра масс; 2
– угловая скорость. Таким образом,
учитывая, что

где - угол поворота звена 2, получаем
 (6.6)
(6.6)
Выражение,
стоящее в фигурных скобках, представляет
собой приведенный момент инерции
механизма J(q).
Используя функции положения xC2(q),
yC2(q),
(q),
xB(q),
можно было бы представить J(q)
в явной форме; однако это аналитическое
выражение даже для такого сравнительно
простого рычажного механизма оказывается
достаточно громоздким. Еще более сложным
является выражение
![]() .
Поэтому на практике часто используются
приближенные представления этих функций,
основанные на их разложении в ряды
Фурье. Легко видеть, что J(q)
– периодическая функция с периодом 2;
она представима в виде ряда:
.
Поэтому на практике часто используются
приближенные представления этих функций,
основанные на их разложении в ряды
Фурье. Легко видеть, что J(q)
– периодическая функция с периодом 2;
она представима в виде ряда:
 (6.7)
(6.7)
Для определения коэффициентов Фурье J0, JC1, … , JS1, … вычисляются значения J(q) при некоторых дискретных значениях q, например, при q = 2k/m (k = 1, … m). Для этого используется выражение для J(q) в форме (6.6), а значения производных от функций положения определяются в процессе кинематического анализа механизма. Затем используются известные приближенные соотношения, выражающие коэффициенты Фурье через дискретные значения периодической функции:
 (6.8)
(6.8)
Далее
составляется приближенное представление
функций J(q)
и
![]()
 (6.9)
(6.9)
 (6.10)
(6.10)
Удовлетворительная
аппроксимация для
![]() –
й гармоники получается только при
условии m
4
–
й гармоники получается только при
условии m
4![]() .
Следует также иметь в виду, что
пренебрежение высшими гармониками в
выражении для приведенного момента
инерции ограничивает область применимости
уравнения (6.5).
.
Следует также иметь в виду, что
пренебрежение высшими гармониками в
выражении для приведенного момента
инерции ограничивает область применимости
уравнения (6.5).
Для
составления уравнения Лагранжа необходимо
также определить обобщенную силу QС
как функцию от
![]() Предположим, что силами тяжести звеньев
механизма можно пренебречь, и единственной
активной силой сопротивления является
сила
Предположим, что силами тяжести звеньев
механизма можно пренебречь, и единственной
активной силой сопротивления является
сила
![]() (рис.6.1), возникающая при выполнении
рабочего процесса и зависящая от
(рис.6.1), возникающая при выполнении
рабочего процесса и зависящая от
![]() и
и
![]() Тогда по формуле (6.2) находим
Тогда по формуле (6.2) находим
 (6.11)
(6.11)
Обобщенная
сила QС часто
называется приведенным моментом
сил сопротивления. Функция QС(q,![]() )
является также периодической по q
с периодом 2.
Если входное звено связано с кривошипом
передаточным механизмом с передаточным
отношением i, то период
равен 2i.
)
является также периодической по q
с периодом 2.
Если входное звено связано с кривошипом
передаточным механизмом с передаточным
отношением i, то период
равен 2i.
В качестве второго примера рассмотрим механизм с линейной функцией положения, показанный на рис.6.2. Он состоит из двухступенчатой передачи (колеса 1-4) и ротора 5. Пусть J1, J2, J3, J4, J5 – моменты инерции вращающихся масс относительно осей их вращения; z1, z2, z3, z4 – числа зубьев колес; MС – момент сил сопротивления, приложенных к ротору. Составляя выражение для кинетической энергии системы, имеем
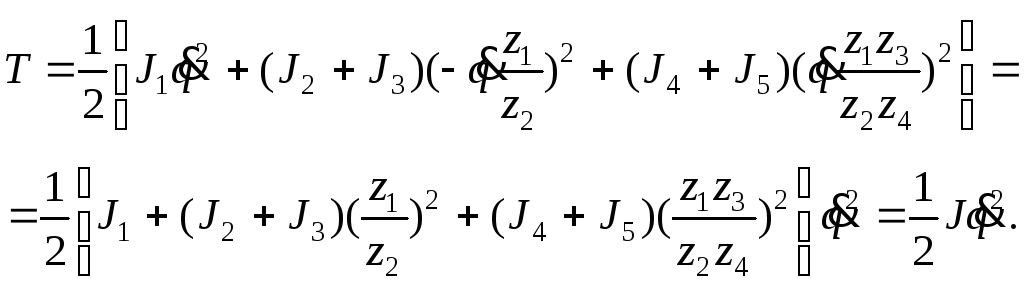 (6.12)
(6.12)
В этом случае приведенный момент инерции
не зависит от координаты q.
Обобщенная сила QС
определяется в соответствии с (6.2):
этом случае приведенный момент инерции
не зависит от координаты q.
Обобщенная сила QС
определяется в соответствии с (6.2):
 (6.13)
(6.13)
Подставляя (6.12) и (6.13) в (6.5), получаем уравнение движения
 (6.14)
(6.14)
где
 (6.15)
(6.15)
– приведенный момент инерции механизма. Отметим, что при приведении вращающихся масс момент инерции каждой из них делится на квадрат передаточного отношения, связывающего эту массу с входным звеном.
Уравнение Лагранжа второго рода может быть использовано, так же как и уравнение Даламбера-Лагранжа, для определения обобщенной движущей силы Q. При заданном законе движения входного звена из уравнения (6.5) находим:
![]() (6.16)
(6.16)
Однако
роль уравнений Лагранжа в динамике
машин этим не исчерпывается. Как уже
отмечалось, они используются так же,
как дифференциальные уравнения движения
механической системы машины, из которых
определяется закон движения q(t).
В обоих случаях для составления уравнений
Лагранжа необходимо знать зависимости
![]() Определение этих функций в аналитической
форме требует обычно достаточно
громоздких преобразований, связанных
с составлением выражения для кинетической
энергии и его дифференцированием, а
также с определением работы активных
сил. В связи с этим для решения первой
задачи (определения обобщенной движущей
силы по заданному закону движения) чаще
всего используются уравнения кинетостатики
или уравнения Даламбера-Лагранжа. Более
того, легко показать, что эти же уравнения
позволяют определить для заданного
значения q величины
Определение этих функций в аналитической
форме требует обычно достаточно
громоздких преобразований, связанных
с составлением выражения для кинетической
энергии и его дифференцированием, а
также с определением работы активных
сил. В связи с этим для решения первой
задачи (определения обобщенной движущей
силы по заданному закону движения) чаще
всего используются уравнения кинетостатики
или уравнения Даламбера-Лагранжа. Более
того, легко показать, что эти же уравнения
позволяют определить для заданного
значения q величины
![]() а при заданных q и
а при заданных q и
![]() – величину QС.
– величину QС.
Действительно,
пусть мы определили с помощью, например,
уравнений кинетостатики величину
обобщенной движущей силы Q
при следующих условиях:
![]() т.е. при нулевом значении угловой скорости
входного звена, единичном угловом
ускорении и при отсутствии активных
сил (что эквивалентно QС
= 0). Предположим, что при этих условиях
т.е. при нулевом значении угловой скорости
входного звена, единичном угловом
ускорении и при отсутствии активных
сил (что эквивалентно QС
= 0). Предположим, что при этих условиях
![]() (Hм). Подставив
выбранные значения
(Hм). Подставив
выбранные значения
![]() в уравнение (6.16), находим, что
в уравнение (6.16), находим, что
![]()
т.е. что величина Q1
численно совпадает с величиной
J(q),
выраженной в Нмс2. Таким
образом, для определения J(q)
нет необходимости составлять выражение
для кинетической энергии механизма,
его можно определить с помощью уравнений
кинетостатики, если их применить для
некоторого «условного» закона движения.
Задавая различные значения q
и повторяя эту процедуру, найдем значения
J(q)
в ряде дискретных точек, что позволяет
аппроксимировать эту функцию, например,
отрезком ряда Фурье (6.9). Найдем теперь
![]() (Нм)
при q=q,
(Нм)
при q=q,
![]() и при отсутствии сил сопротивления.
Подставив эти значения в (6.16), получим
и при отсутствии сил сопротивления.
Подставив эти значения в (6.16), получим
![]() Наконец, задав
Наконец, задав
![]() найдем
найдем
![]() при заданных силах сопротивления; тогда
из (6.16) получим
при заданных силах сопротивления; тогда
из (6.16) получим
![]()