

20. Искусственные механические хар-ки дпв.
Т
 очное
выражение мех-ой хар-ки ДПВ дать трудно,
т.к. Фconst,
и зависимость момента от нагрузки
сложная. При Iном
магнитная цепь машины насыщена. Для
получения характ-к использ кусочно-линейную
аппроксимацию хар-ки намагничивания.
Начальный участок кривой намагничивания
(IЯ0,3IН
и М0,15МН)
с достаточной точностью можно
аппроксимировать прямой
очное
выражение мех-ой хар-ки ДПВ дать трудно,
т.к. Фconst,
и зависимость момента от нагрузки
сложная. При Iном
магнитная цепь машины насыщена. Для
получения характ-к использ кусочно-линейную
аппроксимацию хар-ки намагничивания.
Начальный участок кривой намагничивания
(IЯ0,3IН
и М0,15МН)
с достаточной точностью можно
аппроксимировать прямой
![]() .
Тогда
.
Тогда![]() откуда
откуда![]() .
Подставив это в уравнение электромеханической
характеристики, получим:
.
Подставив это в уравнение электромеханической
характеристики, получим: .
.
О тсюда
следует, что при малых нагрузках мех.
хар-ка ДПВ имеет гиперболический
характер. 2-й участок линейной аппроксимации
кривой намагничивания соответствует
значениямIЯ
до 1,3IН
и М до 1,4МН.
Для него справедливы соотношения для
потока при выражении через ток
тсюда
следует, что при малых нагрузках мех.
хар-ка ДПВ имеет гиперболический
характер. 2-й участок линейной аппроксимации
кривой намагничивания соответствует
значениямIЯ
до 1,3IН
и М до 1,4МН.
Для него справедливы соотношения для
потока при выражении через ток
![]() и через момент
и через момент![]() ,
где
,
где ;1
–коэфф пропорц-ти,а Ф0
– поток остаточной индукции. Подставим
Ф в Ур-е электромех-ой хар-ки, то получ
неявно выраженную гиперболу. При
нагрузках когда IЯ1,3IН,
а М1,4МН
Ф остается практически постоянным и
мех. хар-ка двигателя приобретает лин.
Хар-р. Скорость двигателя уменьш лишь
за счет падения
;1
–коэфф пропорц-ти,а Ф0
– поток остаточной индукции. Подставим
Ф в Ур-е электромех-ой хар-ки, то получ
неявно выраженную гиперболу. При
нагрузках когда IЯ1,3IН,
а М1,4МН
Ф остается практически постоянным и
мех. хар-ка двигателя приобретает лин.
Хар-р. Скорость двигателя уменьш лишь
за счет падения
21 . Тормозные режимы дпв.
ДПВ в обычной схеме имеют только 2 режима: противовключение и динамическое торможение.
Т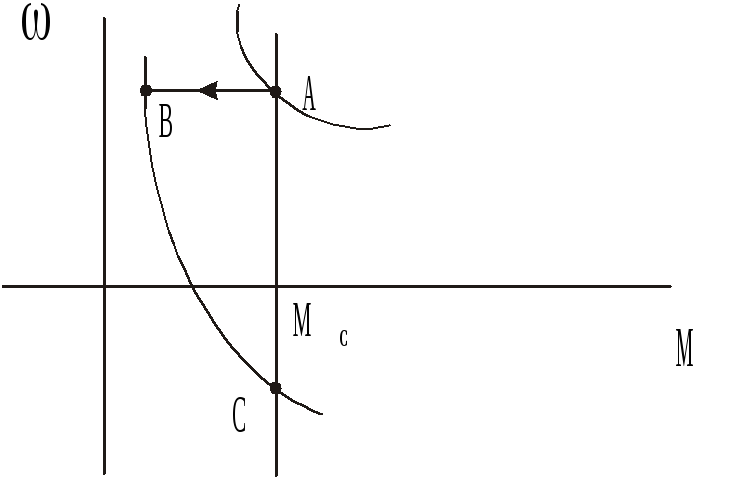
 орможение
противовключением является для ДВП
основным и применяется для грузоподъемных
механизмов. Для перевода из двигательного
режима, (он соотв подъему груза), в режим
противовключения, (тормозной спуск), в
цепь якоря вводится добавочное
сопротивление(Rдоб).
Момент двигателя становится меньше
статического (см. т. В характеристики),
подъем груза прекращается. Под действием
МС
груз начинает опускаться, вращая якорь
в обратн напр-ии. При скорости,
соответствующей т.С, М двигателя
сравняется с МС
и спуск будет происходить с постоянной
скоростью. При изменении направления
вращения ЭДС двигателя изменит знак.
Ток якоря
орможение
противовключением является для ДВП
основным и применяется для грузоподъемных
механизмов. Для перевода из двигательного
режима, (он соотв подъему груза), в режим
противовключения, (тормозной спуск), в
цепь якоря вводится добавочное
сопротивление(Rдоб).
Момент двигателя становится меньше
статического (см. т. В характеристики),
подъем груза прекращается. Под действием
МС
груз начинает опускаться, вращая якорь
в обратн напр-ии. При скорости,
соответствующей т.С, М двигателя
сравняется с МС
и спуск будет происходить с постоянной
скоростью. При изменении направления
вращения ЭДС двигателя изменит знак.
Ток якоря
![]() увелич, а М по отношению к МС,
создаваемому грузом, будет тормозным.
увелич, а М по отношению к МС,
создаваемому грузом, будет тормозным.
Д ля
торможения противовключ-ем надо на ходу
изменить полярность питания якоря, не
меняя направления тока в обмотке
возбуждения согласно следующей схеме.
Для ограничения первоначального броска
тока и момента в цепь якоря должно быть
введено значительноеRдоб,т.к.
ток может возрасти в 30-40 раз
ля
торможения противовключ-ем надо на ходу
изменить полярность питания якоря, не
меняя направления тока в обмотке
возбуждения согласно следующей схеме.
Для ограничения первоначального броска
тока и момента в цепь якоря должно быть
введено значительноеRдоб,т.к.
ток может возрасти в 30-40 раз
Переход из двигательного в тормозной режим изображен на графике. При измен полярности питания якоря двигателя переходит из т.А на характеристику в т.В и останавливается в т.С. Если после остановки его не отключить, двигатель будет разгоняться в противоположном напр-ии и новый уст. режим наступит в т.Д.

 Дин-ое
торможение ДПВ осущ. 2-мя способами: с
самовозбуждением и с независимым
возбуждением. При торможении с самовозбужд
двигатель отключ от сети и замыкается
на тормозное сопрот-ие. И работает как
генератор с самовозбужд. Условием этого
способа явл наличие самовозбужд. При
вращении якоря за счет кинетической
энергии груза в якоре от остаточного
магнетизма будет наводится ЭДС. Ток,
созданный наведенной ЭДС, усилит
магнитный поток, и ЭДС что приведет к
увеличению тока. Это значит, что при
переводе машины из двиг режима в тормозной
необходимо переключить
Дин-ое
торможение ДПВ осущ. 2-мя способами: с
самовозбуждением и с независимым
возбуждением. При торможении с самовозбужд
двигатель отключ от сети и замыкается
на тормозное сопрот-ие. И работает как
генератор с самовозбужд. Условием этого
способа явл наличие самовозбужд. При
вращении якоря за счет кинетической
энергии груза в якоре от остаточного
магнетизма будет наводится ЭДС. Ток,
созданный наведенной ЭДС, усилит
магнитный поток, и ЭДС что приведет к
увеличению тока. Это значит, что при
переводе машины из двиг режима в тормозной
необходимо переключить