

1. Понятие об электроприводе, его назначение, типы и функции.
Эл.приводом называется электромеханическое устройство, предназначенное для приведения в движение рабочих органов машин-орудий и управления их технологическими процессами. Блок схема эл.привода как объекта управления может быть представлена в следующем виде:
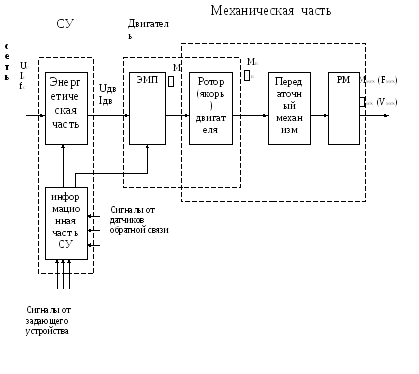
СУ эл.привода состоит из энергетической части и информационной части. Энергетическая часть – это преобр.устройство, назначение которого – управление потоком энергии, поступающим из сети, с целью регулирования режимами работы двигателя и механизма. Преобр.устройство позволяет расширить гибкость управления, позволяет придать характеристикам электропривода нужный вид, что достигается или путем преобразования трехфазного переменного напряжения промышленной частоты в постоянное (выпрямленное) напряжение, или в переменное напряжение, но другой частоты(генераторы, тиристорные преобразователи)
2. Кинематическая схема эл. приводе. Силы и моменты, действующие в системе эл.привода.
К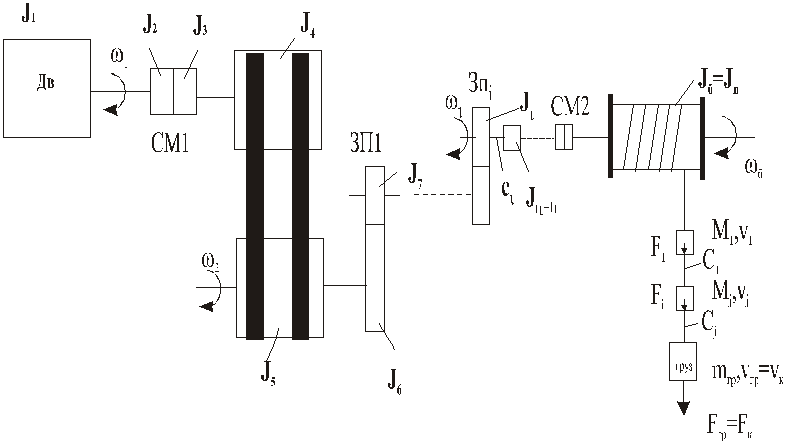 инематические
схемы конкретных эл.приводов бесконечно
многообразны, однако обладают общими
особенностями, которые можно показать
на примере схемы, изображенной на
следующем рис. и содержащие “n”
вращающихся и “k”
поступательно движущих масс. Здесь
двигатель через соединительную муфту
СМ1, клиноременную передачу КРП, ряд
зубчатых передач и соединительную муфту
СМ2 приводит во вращение барабан,
инематические
схемы конкретных эл.приводов бесконечно
многообразны, однако обладают общими
особенностями, которые можно показать
на примере схемы, изображенной на
следующем рис. и содержащие “n”
вращающихся и “k”
поступательно движущих масс. Здесь
двигатель через соединительную муфту
СМ1, клиноременную передачу КРП, ряд
зубчатых передач и соединительную муфту
СМ2 приводит во вращение барабан,
преобразующий вращательное движение в поступательное перемещение ряда связанных масс. При составлении этой схемы принято, что каждый вращающийся элемент обладает моментом инерции J и связан с (+1) элементом механической связью, обладающей жесткостью С, а каждый поступательно движущийся элемент имеет массу mj и связан со следующим элементом механической связью с жесткостью Cj. При нагружении элементы системы (валы, зубчатые колеса, клиноременные передачи и т.п.) деформируются, т.к. механические связи не являются абсолютно жесткими, а массы могут взаимно перемещаться, причем величина перемещений определяется жесткостью связей.
Рабочий орган производственного механизма реализует подведенную к нему механическую энергию в полезную работу. Он обычно является потребителем энергии. Но в ряде случаев он является и источником энергии, отдавая ее двигателю (например, на грузоподъемных установках). Эл.магнитный момент двигателя М является выходной
Механические характеристики производственных механизмов.
f(Mc) Mc=().
Механические характеристики являются одним из основных критериев при выборе типа двигателя для исполнительного механизма. Различные производственные механизмы имеют различные механические характеристики. Аналитически многие из них можно выразить одной формулой Бланка:
Mc=M0+(Mсн-M0)(н)х , где
Мс и Мсн статические моменты сопротивления механизма соответственно при скорости и н; Мо – момент холостого хода (трения) механизма, не зависящий от скорости. Механические характеристики производственных механизмов можно разделить на следующие классы:
Не зависящие от скорости (см. график).
При этом Х=0 и ее уравнение Мс=Мсн. Такой характеристикой обладают механизмы, служащие для подъема груза, или механизмы, в которых сопротивление движению оказывают силы сухого трения.
С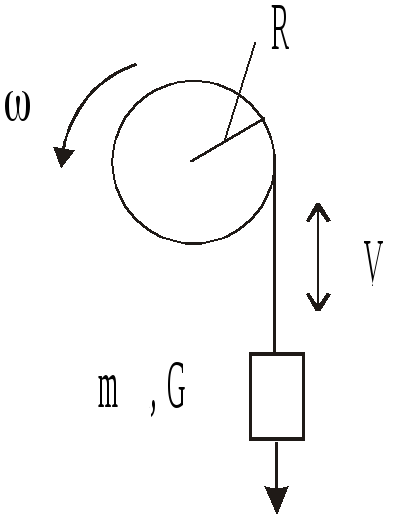
 ила
тяжести как при подъеме, так и при спуске
груза направлена в одну и туже сторону
– в сторону спуска и неизменна по
значению. Механическая характеристика
в этом случае имеет вид прямой1.Мс в этом
случае зависит от массы груза: Мс=GR=mgR
и может изменяться в пределах от Мс=0
(G=0)
до Мс=Мсн(G=Gном).
ила
тяжести как при подъеме, так и при спуске
груза направлена в одну и туже сторону
– в сторону спуска и неизменна по
значению. Механическая характеристика
в этом случае имеет вид прямой1.Мс в этом
случае зависит от массы груза: Мс=GR=mgR
и может изменяться в пределах от Мс=0
(G=0)
до Мс=Мсн(G=Gном).
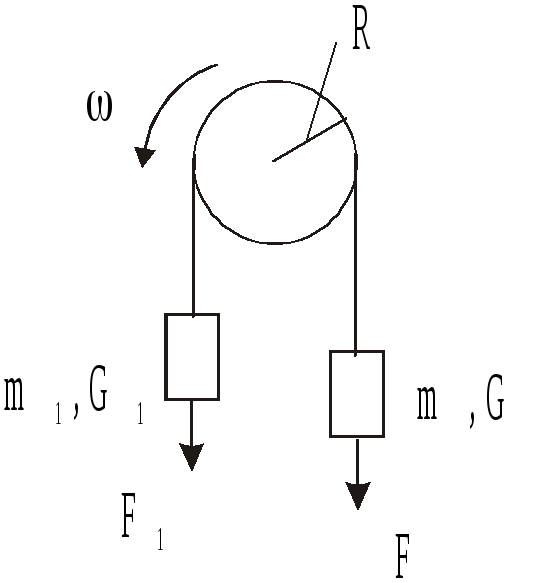
Для снижения рабочей нагрузки установки с тяжелыми грузоподъемными устройствами обычно выполняются уравновешенными. Примером может служить лифтовый подъемник с противовесом. В данном случае полезная нагрузка механизма определяется разностью сил натяжения каната со стороны кабины F и со стороны противовеса F и со стороны противовеса F1.
Fмех=F-F1 или Mc=(G-G1)R=g(m-m1)R
Сила Fмех (Мс) не зависит от скорости, не изменяется при изменении направления движения, но в отличие от предыдущего примера как при подъеме, так и при спуске кабины может иметь различный знак в зависимости от массы поднимаемого груза. Так, при G>G1, полезная нагрузка имеет тот же знак, что и в случае неуравновешенного подъемника (прямая 1 на графике).