

Шпоры по ЭМС [3 курс 6 семестр] / Вторая сторона
.doc
![]() ;
;
![]() ;
а при ji
=const
и j=const
формулы приведения имеют следующий
вид:
;
а при ji
=const
и j=const
формулы приведения имеют следующий
вид:
![]() ;
;
![]() .
.
Жесткость упругих элементов
условии сохранения неизменной величины потенциальной энергии деформации реальной и эквивалентной систем.
О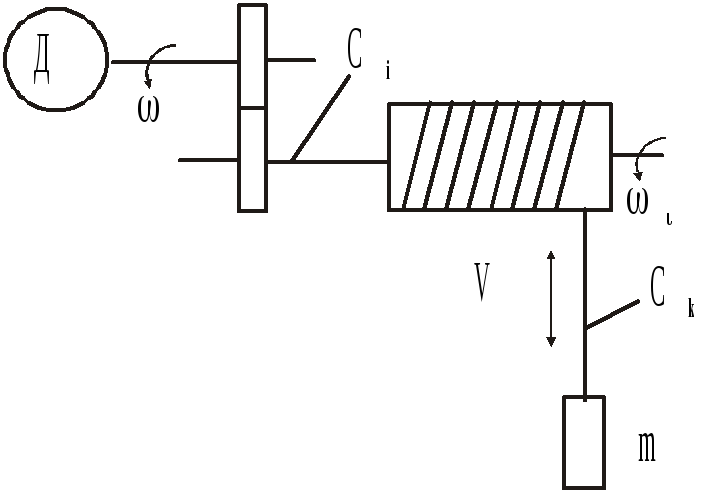 тметим,
что приведенной жесткостью элемента
называется крутящий момент (усилие),
необходимый для получения крутильной
деформации упругого элемента 1 радиан
(или линейной деформации 1 м).
тметим,
что приведенной жесткостью элемента
называется крутящий момент (усилие),
необходимый для получения крутильной
деформации упругого элемента 1 радиан
(или линейной деформации 1 м).
Приведенная жесткость может быть определена, если известен фактический коэффициент жесткости упругого элемента и кинематические параметры системы. Пусть, например, участок кинематической цепи с жесткостью Сi (см. рис.) при закручивании получает деформацию i радиан.
Потенциальная
энергия деформации при этом
![]()
Эквивалентный упругий элемент должен иметь такую же потенциальную энергию.
![]() ,
где
,
где
пр – угол поворота оси приведения при закручивании упругого элемента на величину i, а Спр – приведенная жесткость эквивалентного элемента.
Если жесткость
упругого элемента проводится к скорости
вала двигателя и передаточное число
между их осями
![]() ,
тогда из условия W=W’,
получим
,
тогда из условия W=W’,
получим
![]()
Т.о., для определения Спр любого упругого элемента, испытывающего крутильную деформацию, необходимо его жесткость Сi разделить на квадрат j между этим элементом и осью приведения.
Аналогично
осуществляется приведение жесткостей
упругих элементов с линейными деформациями
растяжения или сжатия. Так, для упругого
каната, имеющего жесткость Ck=Cj
и линейную деформацию S
(см. рис.), потенциальная энергии деформации
![]()
Потенциальная
энергия эквивалентного упругого
элемента, подвергающегося крутильной
деформации
![]() .
Приравнивая, найдем
.
Приравнивая, найдем
![]() .
.
П ри
G=G1,
Мс=0,
а при G<G1,
т.е. при перемещении ненагруженной
кабины направление полезной нагрузки
механизма меняется на противоположное
(прямоя1`). Характеристика =f(Mc)
для нагрузки типа сухого трения также
не зависит от скорости, но зависит от
ее знака (прямая 2).
ри
G=G1,
Мс=0,
а при G<G1,
т.е. при перемещении ненагруженной
кабины направление полезной нагрузки
механизма меняется на противоположное
(прямоя1`). Характеристика =f(Mc)
для нагрузки типа сухого трения также
не зависит от скорости, но зависит от
ее знака (прямая 2).
2.Линейно-возрастающая (прямая 3). В этом случае х=1 и Мс линейно зависит от . Такая характеристика имеет место в приводе генератора независимого возбуждения если он работает на постоянное внешнее сопротивление. Это нагрузка типа вязкого трения. В этом случае Мс=в.г.*, где в.г.- где коэффициент пропорциональности. На практике такая нагрузка встречается редко. Чаще ее можно наблюдать в виде слабой линейной составляющей в нагрузке типа сухого трения.
3.Параболическая характеристика(кривая 4). Ей соответствует х=2. Момент Мс зависит от квадрата скорости.
Мс=Мо+(Мсн-М0)![]()
Такую характеристику имеют механизмы типа центробежных насосов, вентиляторов, дымососов и т.п. Момент сопротивления таких механизмов часто называют вентиляторными.
4. Нелинейно спадающая характеристика (кривая 5), т.е. зависящая от величины и знака скорости. Ей соответствует х=-1. Момент сопротивления изменяется обратно пропорционально скорости, а мощность на валу механизма остается постоянной. Такой характеристикой обладают некоторые токарные, расточные, фрезерные и др. металлорежущие станки, моталки рулонной жести в металлургической промышленности.
З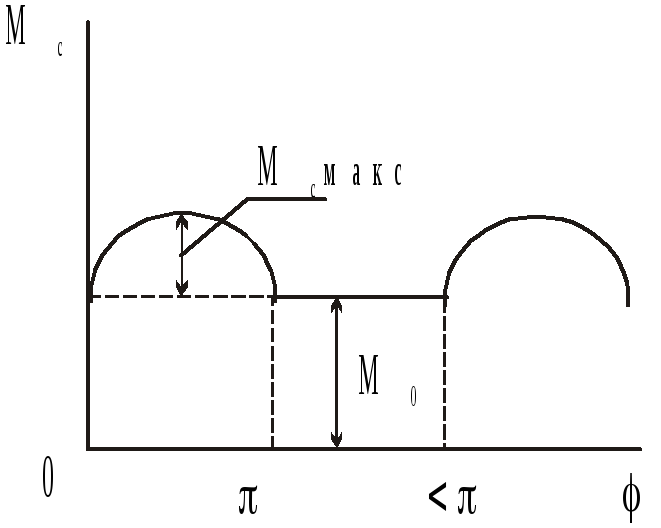
![]() начительное
влияние на динамические процессы в
электромеханической системе электропривода
оказывают нагрузки, зависящие от угла
поворота рабочего органа механизма.
Момент сопротивления в этом случае (см.
рис.)
начительное
влияние на динамические процессы в
электромеханической системе электропривода
оказывают нагрузки, зависящие от угла
поворота рабочего органа механизма.
Момент сопротивления в этом случае (см.
рис.)
Мо – момент холостого хода механизма.
Такие нагрузки появляются при
величиной для электрической части системы ЭП и входной для механической части.
Движение эл.привода определяется действием двух моментов: эл.магнитного момента М двигателя и момента Мс, препятствующего движению и вызванного силами полезных и вредных сопротивлений движению, т.е. так называемого момента сопротивления, который определяет статическую нагрузку эл.привода. В зависимости от причины, обуславливающей возникновение Мс, различают реактивные и активные или потенциальные Мс.
Реактивные силы и моменты сопротивления появляются только вследствие движения. Следовательно, они зависят от скорости. Они всегда препятствуют движению и изменяют свой знак при изменении направления движения, т.е. они всегда направлены встречно относительно вращающего момента двигателя. К таким моментам относятся моменты от трения, резания металла или дерева и т.п. К числу этих моментов относится и момент, создаваемый в самом двигателе всеми видами трения и потерями в стали якоря или ротора (момент холостого хода).
В противоположность реактивным активные моменты сопротивления не изменяют свой знак при изменении направления движения, т.е. при одном направлении вращения двигателя они могут действовать встречно относительно вращающего момента, а при другом направлении вращения – согласно с моментом двигателя и, следовательно, могут рассматриваться как вращающие, движущие. Так, например, момент, создаваемый грузом подъемного механизма сохраняет свой знак как при подъеме ,так и при спуске груза, но в первом случае он препятствует движению, а во втором – способствует.
К активным моментам относятся моменты от веса, растяжения, сжатия, скручивания упругих тел .
По характеру влияния на механические колебания все силы и моменты делятся на консервативные и диссипативные. Консервативными называются силы и моменты, при воздействии которых на систему не происходят поглощения энергии колебаний. Такими являются силы , не зависящие от скорости, в частности сила тяжести, работа которой за период колебаний равна нулю. Диссипативные силы и моменты – это те, при воздействии которых на систему происходит поглощении энергии колебаний. Вязкое трение является примером диссипативной силы (момента).
Информационная часть системы управления предназначена для фиксации и обработки поступающей информации о задающих воздействиях и реальном состоянии системы. На основе этой информации вырабатываются сигналы управления преобразовательным устройством и двигателем. Сама же система управления обеспечивает электроприводу необходимые статические и динамические свойства. Передаточное устройство (передаточный механизм) служит для изменения скорости или вида движения (из вращательного в поступательное или наоборот) - редукторы, кривошипно – шатунные механизмы, зубчато – реечные или клино – ременные передачи, барабаны с тросами и т.п..
Основная функция - приведение в движение рабочего механизма с неизменной скоростью. А также более широкие функции, обеспечивая рациональное ведение технологического процесса, более высокую производительность механизма при лучшем качестве выпускаемой продукции.
В зависимости от схемы передачи энергии от сети к рабочим органам механизмов различаются три типа эл.привода:
1.Групповой (трансмиссионный).
2.Однодвигательный или индивидуальный.
3.Многодвигательный (тоже индивидуальный).
-
Н
 е
учитываются потери в стали на гистерезис
и вихревые токи.
е
учитываются потери в стали на гистерезис
и вихревые токи. -
Зазор явнополюсной машины принимается равномерным, а не явнополюсность учитывается разной проводимостью по продольной и поперечной осям путем введения понятная переменой радиальной магнитной проницаемости:
![]() ,
где
,
где
![]() - электрический
угол поворота ротора относительно
статора.
- электрический
угол поворота ротора относительно
статора.
-
Параметры ротора считаются приведенными к статору.
-
Сопротивления обмоток фаз статора и ротора считаются одинаковыми.
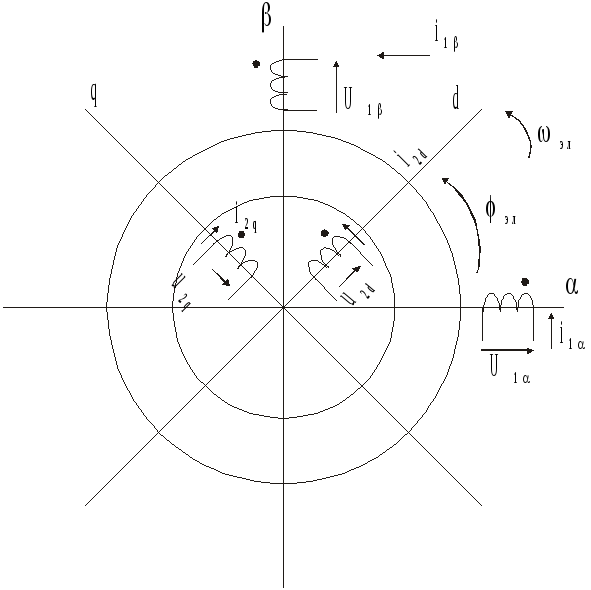
Схему обобщенной двухполюсной машины можно представить так, как изображено на рис. На 2-х взаимно перпендикулярных осях и , жестко скрепленных со статором, расположены две обмотки статора. На 2-х взаимно перпендикулярных осях d и q, жестко скрепленных с ротором, расположены две обмотки ротора. Они вращаются в пространстве вместе с ротором с угловой скоростью ЭЛ. Процессы проходящие в машине, описываются уравнениями равновесия ЭДС в цепях статора и ротора и уравнением электромагнитного момента.
Согласно закону Кирхгофа уравнения электрического равновесия имеют вид:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
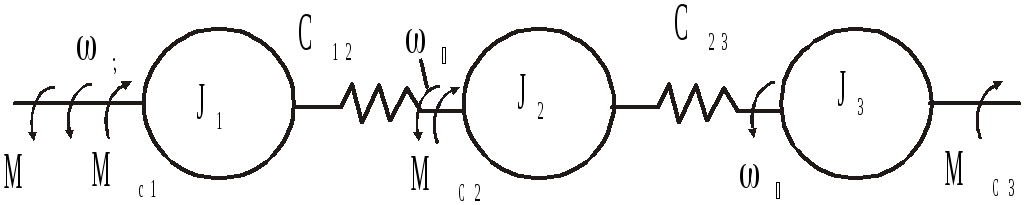
Д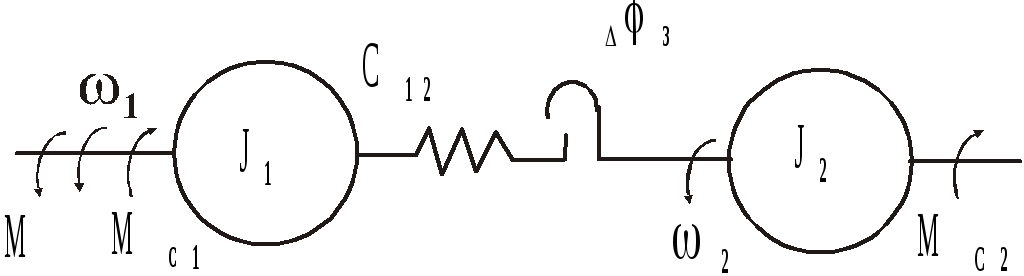 инамические
нагрузки механического оборудования
значительно возрастают из-за ударов,
возникающих при выборе зазоров в
передачах и сочленения машин. С учетом
кинематических зазоров расчетная схема
2-х массовой упругой механической системы
может быть представлена в следующем
виде:
инамические
нагрузки механического оборудования
значительно возрастают из-за ударов,
возникающих при выборе зазоров в
передачах и сочленения машин. С учетом
кинематических зазоров расчетная схема
2-х массовой упругой механической системы
может быть представлена в следующем
виде:
При наличии зазора
3
зависимость момента М12
упругого взаимодействия
![]() становится нелинейной и принимает вид,
изображенный на следующем рис.
становится нелинейной и принимает вид,
изображенный на следующем рис.
Уравнения движения в этом случае запишутся в виде:
![]()
![]()
![]() при
при
![]() М12=0
при
М12=0
при
![]()
В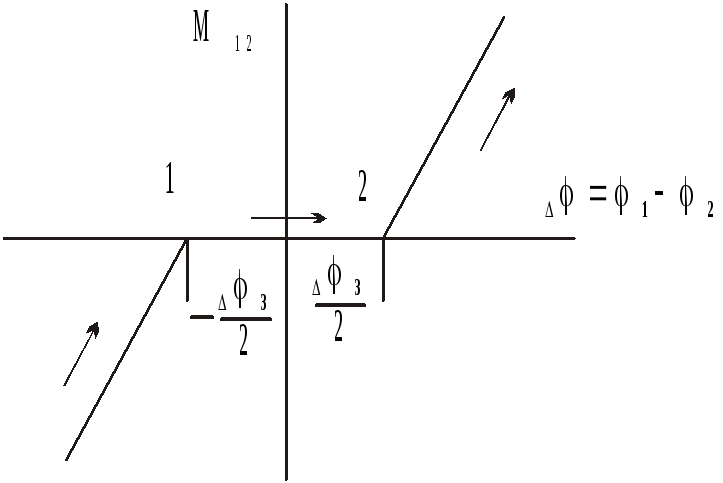 о
время пуска при разомкнутом зазоре
механическая связь между инерционными
массами J1
и J2
отсутствует и под действием момента
двигателя М=М1
инерционные массы J1
движутся равноускоренно со скоростью
о
время пуска при разомкнутом зазоре
механическая связь между инерционными
массами J1
и J2
отсутствует и под действием момента
двигателя М=М1
инерционные массы J1
движутся равноускоренно со скоростью
![]() где
где
![]() - ускорение при
выборе зазора.
- ускорение при
выборе зазора.
За время выбора
зазора двигатель успевает разогнаться
до некоторой начальной скорости lнач
и запасти кинетическую энергию
![]() ,
откуда
,
откуда
![]() .
.
Это уравнение
соответствует наиболее тяжелому случаю
выбору полного зазора, когда начальное
значение
соответствует точке 1 (см. зависимость
![]() ),
а заканчивается выбор зазора в т.2.
),
а заканчивается выбор зазора в т.2.
После выбора зазора инерционная масса J2 будет оставаться еще неподвижной. Начнется деформация (закручивание) упругих элементов под действием момента М12.Это будет продолжаться до тех пор, пока М12, возрастая, не превысит МС2. За время нарастания М12 до МС2 скорость инерционной массы J1 дополнительно увеличивается до 1нач.. Т.к. инерционные массы механизма при этом неподвижны, процесс выбора зазора заканчивается упругим ударом, при
![]()
 Следовательно,
обобщенная сила
Следовательно,
обобщенная сила
![]() .
.
Аналогично
элементарная работа всех приложений
ко 2-й и 3-й массам моментам на возможных
перемещениях 2
и 3:
![]() ,
откуда
,
откуда
![]()
![]() ,
откуда
,
откуда
![]()
т.к. ко 2-й и 3-й массам электромагнитный момент двигателя не приложен. Функция Лагранжа L=Wk-Wn.
Учитывая значения Q1`,Q2`и Q3` и подставив их в уравнение Лагранжа, получим уравнения движения трехмассовой упругой системы
![]()
![]()
![]()
Здесь 1-е уравнение определяет движение инерционной массы J1, 2-е и 3-е движение инерционных масс J2 и J3.
В случае двухмассовой системы Мс3=0; J3=0 уравнения движения имеют вид:
![]()
![]()
В случае жесткого
приведенного механического звена
![]() ;
;
![]()
Уравнение движения
имеет вид
![]()
Это уравнение является основным уравнением движения эл.привода.
Здесь J1,J2,J3 – суммарные приведенные моменты инерции, образованные приведенными массами, связи между которыми приняты жесткими. С12 и С23 – приведенные жесткости упругих связей между J1 и J2, J2 и J3.
Инерционная масса J1 включает в себя момент инерции ротора (якоря) двигателя и других элементов, жестко связанных с ним. К этой массе приложен электромагнитный момент М двигателя и момент статической нагрузки Мс1, который обычно является суммарным моментом потерь на валу двигателя и жестко с ним связанных элементах. Инерционная масса J2 является в трехмассовой расчетной схеме промежуточной массой. К ней приложен момент сопротивления Мс2. Инерционная масса J3 в этой схеме представляет суммарный приведенный момент инерции элементов, жестко связанных с рабочим органом механизма. К ней приложен момент внешней нагрузки этой массы Мс3.
В двухмассовой расчетной схеме J1 – это суммарный приведенный момент инерции ротора (якоря) двигателя и других элементов, жестко связанных с двигателем, а J2 суммарный приведенный момент инерции элементов, жестко связанных с рабочим органом механизма. Упругая связь между J1 и J2 характеризуется эквивалентной жесткостью С12. Суммарные моменты сопротивления на валу двигателя и механизма – Мс1 и Мс2.
Обычно 3-х массовая расчетная схема используется для детального анализа условий движения механизма. Для исследования отдельных физических особенностей 3-х массовая расчетная схема сводится к 2-х массовой. Электромеханическая система с 2-х массовой упругой механической частью представляет собой простейшую модель электропривода, наиболее удобную для изучения влияния упругих связей.
В тех случаях,
когда влияние упругих связей незначительно
или при решении задачи ими можно
пренебречь, механическая часть
электропривода представляется простейшей
расчетной схемой (см. рис.) – жестким
приведенным механическим звеном, т.е.
многомассовая механическая часть
эл.привода с моментами инерциями J1
,J2
и т.д. заменяется действием одного
момента инерции Jnp,
приведенного к расчетной скорости.
Суммарный приведенный момент инерции
эл.привода в этом случае определяется
как
![]()
 ,
где
,
где
J – момент инерции двигателя; n, k – число элементов установки, совершающих соответственно вращательное и поступательное движение.
Г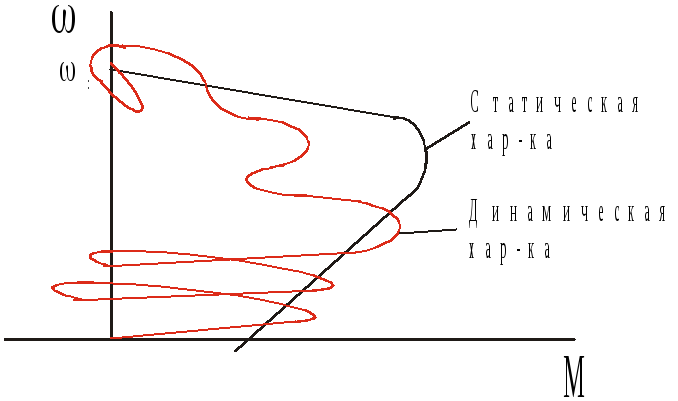 рафически
динамическая механическая характеристика
представляет собой геометрическое
место точек на плоскости (,
М), каждая из которых соответствует
определенному моменту времени. Статическая
механическая характеристика представляет
собой геометрическое место точек на
плоскости (,
М), соответствующих установившемуся
режиму работы. В качестве примера на
рис. изображены статическая и динамическая
механические характеристики асинхронного
двигателя (для режима пуска) в холостую.
рафически
динамическая механическая характеристика
представляет собой геометрическое
место точек на плоскости (,
М), каждая из которых соответствует
определенному моменту времени. Статическая
механическая характеристика представляет
собой геометрическое место точек на
плоскости (,
М), соответствующих установившемуся
режиму работы. В качестве примера на
рис. изображены статическая и динамическая
механические характеристики асинхронного
двигателя (для режима пуска) в холостую.
При изменении нагрузки на валу двигателя скорость его изменяется. Величиной, характеризующей степень ее изменения, является жесткость механической характеристики.
Статическая
жесткость характеристики определяется
как отношение приращения момента к
приращению скорости, т.е.
![]() .
Понятием жесткости оценивается форма
механической характеристики. Это понятие
применимо и для оценки формы механической
характеристики производственных
механизмов. Графически жесткость
определяется ctg
угла наклона между касательной к
характеристике и осью моментов, т.е.
.
Понятием жесткости оценивается форма
механической характеристики. Это понятие
применимо и для оценки формы механической
характеристики производственных
механизмов. Графически жесткость
определяется ctg
угла наклона между касательной к
характеристике и осью моментов, т.е.
![]() или
или
![]()
 отсчитывается по
часовой стрелке. Здесь m
и mм
– масштабы скорости и момента. Статические
характеристики могут иметь положительную
и отрицательную жесткость. Если при
увеличении нагрузки скорость уменьшается
– жесткость характеристики отрицательна
и наоборот.
отсчитывается по
часовой стрелке. Здесь m
и mм
– масштабы скорости и момента. Статические
характеристики могут иметь положительную
и отрицательную жесткость. Если при
увеличении нагрузки скорость уменьшается
– жесткость характеристики отрицательна
и наоборот.
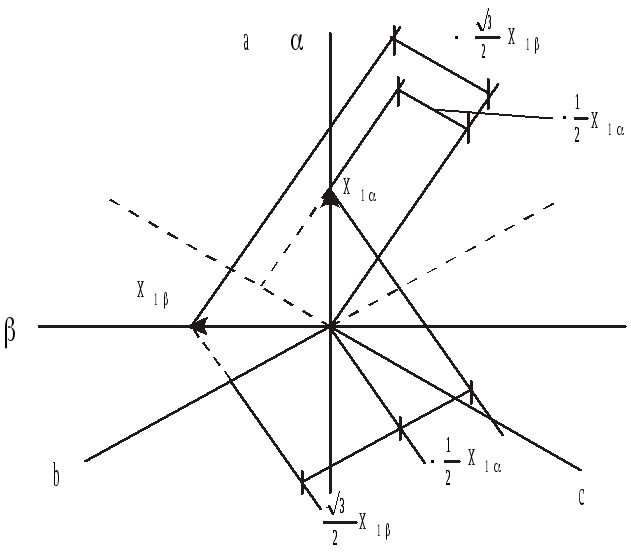
Формулы обратного преобразования можно получить аналогично с помощью следующего рисунка:
![]()
![]()
![]()
Для определения кс выразим суммарную мгновенную мощность, потребляемую статором 3-х фазной машины, через переменные эквивалентной двухфазной машины.
![]()
![]()
Следовательно,
для выполнения условия равенства
мощностей кс
должен быть равен
![]() .
При этом
.
При этом
![]()
В случае несимметричной
трехфазной машины
![]() .
Формулы прямого преобразования
дополняются уравнением:
.
Формулы прямого преобразования
дополняются уравнением:
![]() ,
а формулы обратного преобразования
будут иметь вид:
,
а формулы обратного преобразования
будут иметь вид:![]()
![]()
![]()
Пример перехода
от переменных 3-х фазной машины к
переменным 2-х фазной цепи машины
![]()
Если выразить через действующие (эффективные) значения, то получим:
![]()
Эти уравнения
целесообразно использовать для анализа
процессов в синхронных машинах, когда
в роторе протекает постоянный ток.(ток
возбуждения). В синхронных машинах в
установившимся режиме
![]() и
и
![]() .
.
-
Выбор
 .
Соответствует преобразованию реальных
переменных к осям x,y,
вращающимся синхронно со скоростью
поля машины, т.е. неподвижных относительно
поля статора.
.
Соответствует преобразованию реальных
переменных к осям x,y,
вращающимся синхронно со скоростью
поля машины, т.е. неподвижных относительно
поля статора.
Естественно, что поскольку обмотки статора и ротора, связанные с осями u,v, неподвижны относительно друг друга, но вращаются вместе с этими осями со скоростью поля, то частота токов в них равна 0, т.е. они являются постоянными.
Уравнения динамической механической характеристики обобщенной машины в осях x,y.
![]()
![]()
![]()
![]()
![]()
В осях x,y реальные переменные напряжения, приложенные к статору преобразуются в постоянное напряжение U1макс=const, приложенное только к обмотке, расположенной на оси х.
Действительно,
пусть к реальным обмоткам статора
приложена симметричная система напряжений
![]()
![]() .
.
Если с помощью формул прямого преобразования преобразовать U1 и U1 в соответствующие им напряжения U1x и U1y и учесть, что к=эл, получим:
![]()
![]()
Для явнополюсной
машины в соответствие с выражением
![]() собственные и взаимные индуктивности
обмоток можно представить в виде суммы
2-х составляющих, одна из которых
пропорциональна ,
а другая - .
Первые не отличаются от рассмотренных
для неявнополюсной машины. Вторые
совершают полный цикл изменения при
повороте ротора на одно полюсное деление.
собственные и взаимные индуктивности
обмоток можно представить в виде суммы
2-х составляющих, одна из которых
пропорциональна ,
а другая - .
Первые не отличаются от рассмотренных
для неявнополюсной машины. Вторые
совершают полный цикл изменения при
повороте ротора на одно полюсное деление.
Т.к. ротор считается гладким, то собственные индуктивности явно полюсного статора не зависят от положения ротора, а собственные индуктивности ротора изменяются в соответствии с изменением . Взаимные индуктивности между обмотками ротора при явно полюсном статоре 0 и также определяются изменением , т.к. явнополюсный статор при вращении ротора изменяет картину магнитного поля в воздушном зазоре. Соответствующие изложенным положениям выражения для индуктивностей и взаимных индуктивностей здесь не приводится ввиду их громоздкости.
С учетом представления потокосцеплений в обобщенной форме, уравнение электрического равновесия можно записать в виде:
![]()
Электромагнитный
момент обобщенной машины можно найти
как частную производную от запаса
электромагнитной энергии А по
геометрическому углу. .Т.к.
![]() ,
то
,
то
![]()
Подставив сюда
выражения собственных и взаимных
индуктивностей неявнополюсной машины,
уравнение электромагнитного момента
можно получить в виде:
![]() .
.
![]()
![]()
![]()
![]()
Если в выражении электромагнитного моменты неявнополюсной машины реальные токи
![]()
заменить на
преобразованные по формулам обратного
преобразования, получим после
преобразований:
![]() .
.
Если выразить токи через потокосцепления статора 1 или ротора 2 или и статора 1 и ротора 2, можно получить следующие выражения электромагнитного момента обобщенной машины:
![]()
![]()

Объединив уравнения электромеханической характеристики с уравнением электромагнитного момента, получим математическое описание динамической механической характеристики обобщенной машины:
![]()
![]()
![]()
![]()
![]()
П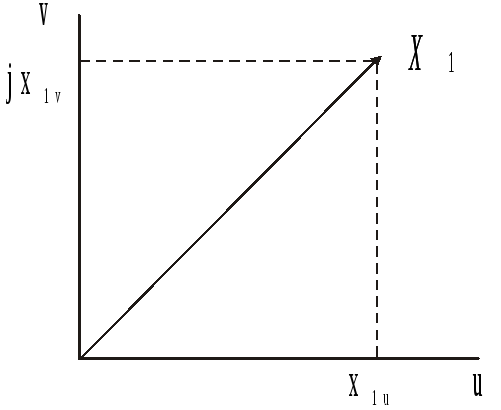 реобразованную
систему уравнений динамической
механической характеристики можно
представить в комплексной (векторной)
форме, если ось U
принять за действительную, а ось V
– за мнимую.
реобразованную
систему уравнений динамической
механической характеристики можно
представить в комплексной (векторной)
форме, если ось U
принять за действительную, а ось V
– за мнимую.
Напряжения, токи, потокосцепления в выше написанных уравнениях являются проекциями результирующих (обобщенных) векторов этих величин на оси U и V,
![]()
![]()
![]()
![]()