

Шпоры по ЭМС [3 курс 6 семестр] / Вторая сторона2
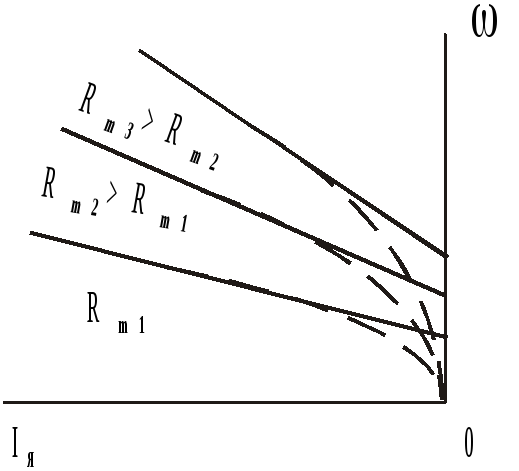
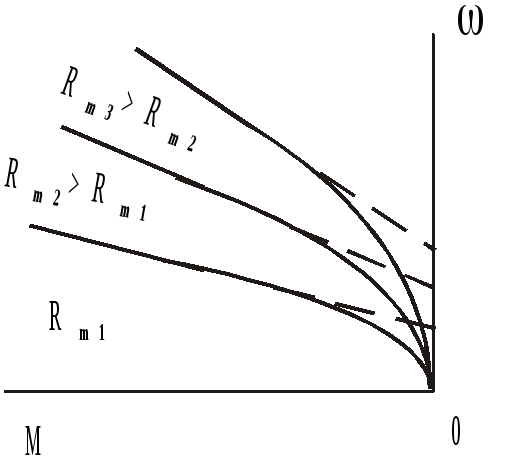
.docнапряжения в якорной цепи. Для расчетов эл.приводов с ДПВ обычно применяются графич и графоаналитич-е методы с использ экспериментальных зависимостей его скорости, момента, потока от тока якоря, учитывающих как насыщение, так и влияние реакции якоря.
З ная
номинальные данные двиг и пользуясь
этими универсальными хар-ми можно,
задаваясь различными значениями тока
якоря, найти
и М по кривым
ная
номинальные данные двиг и пользуясь
этими универсальными хар-ми можно,
задаваясь различными значениями тока
якоря, найти
и М по кривым
![]() и
и
![]() и
построить естественную механическую
характеристику двигателя
и
построить естественную механическую
характеристику двигателя
![]() .
Однако нужно помнить, что это будет
зависимость скорости от момента на
валу. При изменении напр-я на зажимах
двигателя хар-ки перемещаются вниз или
вверх по
.
Однако нужно помнить, что это будет
зависимость скорости от момента на
валу. При изменении напр-я на зажимах
двигателя хар-ки перемещаются вниз или
вверх по

отношению к естественной. При увеличении сопротивления якорной цепи скорость двигателя уменьшается и характеристики смещаются вниз. Жесткость характеристик при этом уменьшается. Из графиков видно, что скорость ДПВ при работе как на естественной, так и на искусственных характеристиках при увеличении нагрузки резко падает.
![]()
 ,
откуда
,
откуда
![]() ,
или
,
или
![]() ;
или
;
или
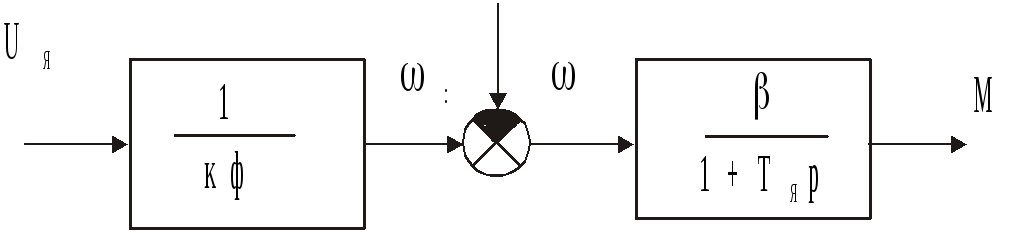
![]() Этому уравнению соответствует структурная
схема.
Этому уравнению соответствует структурная
схема.
Она показывает,
что при Ф=const
ЭМП с независимым возбуждением
представляет собой апериодическое
звено с постоянной времени ТЯ.
Индуктивность рассеяния якорной цепи
двигателя может быть вычислена по
приближенной формуле Уманского –
Линвилля.
![]() ,
где =0,50,6
для некомпенсированных машин и =0,25
для компенсированных машин.
,
где =0,50,6
для некомпенсированных машин и =0,25
для компенсированных машин.
ТЯ для двигателей средней и большей мощности равно (0,020,1)с,
1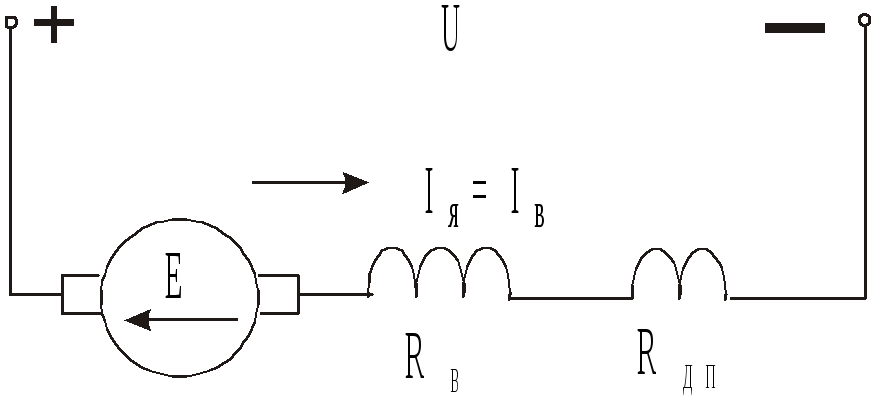 9.
Математическое описание процессов
преобразования энергии в двигателе
постоянного тока последовательного
возбуждения (ДПВ). Естественная хар-ка.
У двигателя
последовательного возбуждения обмотка
возбуждения включена последовательно
с обмоткой якоря и его поток Ф является
функцией тока якоря, т.е. зависит от
нагрузки машины. Принципиальная схема
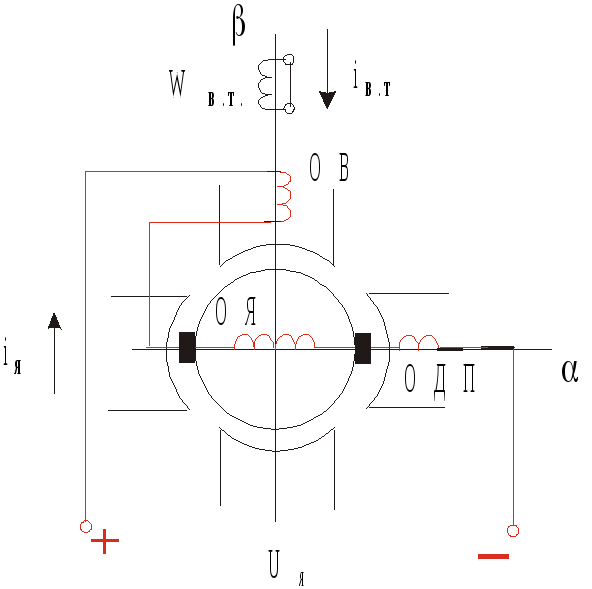
ДПВ изображена на рис., а схема двухфазной
модели ЭМП двигателя последовательного
возбуждения может быть получена
аналогично схеме модели ЭМП ДНВ при
включении обмотки возбуждения
последовательно в цепь якоря (см. рис.
ниже). При быстрых изменениях нагрузки,
следовательно быстрых изменениях Ф,
анализ динамических свойств двигателя
без учета влияния вихревых токов,
наводимых в сердечниках полюсов и
станине, может привести к значительным
ошибкам. Влияние этих токов может быть
учтено добавлением к.з. обмотки на оси
,
связанной с потоком Ф машины по этой
оси коэффициентом связи, равным 1. С
учетом этой фиктивной обмотки
математическое описание процессов
преобразования энергии в ДПВ имеет вид:
9.
Математическое описание процессов
преобразования энергии в двигателе
постоянного тока последовательного
возбуждения (ДПВ). Естественная хар-ка.
У двигателя
последовательного возбуждения обмотка
возбуждения включена последовательно
с обмоткой якоря и его поток Ф является
функцией тока якоря, т.е. зависит от
нагрузки машины. Принципиальная схема
ДПВ изображена на рис., а схема двухфазной
модели ЭМП двигателя последовательного
возбуждения может быть получена
аналогично схеме модели ЭМП ДНВ при
включении обмотки возбуждения
последовательно в цепь якоря (см. рис.
ниже). При быстрых изменениях нагрузки,
следовательно быстрых изменениях Ф,
анализ динамических свойств двигателя
без учета влияния вихревых токов,
наводимых в сердечниках полюсов и
станине, может привести к значительным
ошибкам. Влияние этих токов может быть
учтено добавлением к.з. обмотки на оси
,
связанной с потоком Ф машины по этой
оси коэффициентом связи, равным 1. С
учетом этой фиктивной обмотки
математическое описание процессов
преобразования энергии в ДПВ имеет вид:
![]()
![]()
![]() ,
где
,
где
![]()
Индуктивность рассеяния якорной цепи LЯ ДНВ значительно меньше индуктивности LВ обмотки возбуждения, связанной с главным потоком двигателя, поэтому ею часто пренебрегают. Однако при этом нужно иметь в виду, что при LЯ=0 ток двигателя при изменении скачком приложенного напряжения тоже может измениться скачком.
Для практического
использования написанными уравнениями
в них необходимо исключить вихревой
ток iВ.Т.
и положить
![]() .
Тогда
.
Тогда
![]() ;
;
![]()
В рассматриваемой
модели МДС статора создается постоянным
током возбуждения iв=i1,
поэтому она ориентированна по оси
и неподвижна в пространстве. Соответственно
и МДС ротора при вращении со скоростью
эл
должна быть неподвижна относительно
неподвижного статора. Это возможно
только при условии, что МДС ротора (поле
ротора) вращается относительно ротора
в противоположном направлении со
скоростью - эл.
Для этого нужно, чтобы обмотки фаз ротора
обтекались переменными токами i2d
и i2q,
изменяющиеся с частотой эл
по закону:
![]()
![]() .
.
Т.к. поле ротора
неподвижно относительно статора, для
математического описания процессов
преобразования энергии целесообразно
сделать преобразование переменных
машины к осям ,
для случая к=0.
С этой целью используем формулы прямого
преобразования, учитывая что
![]() .
.
![]()
![]() .
.
Преобразованные к осям , значения токов i2d и i2d получим, подставив сюда выражения i2d и i2d :
![]()
![]()
Э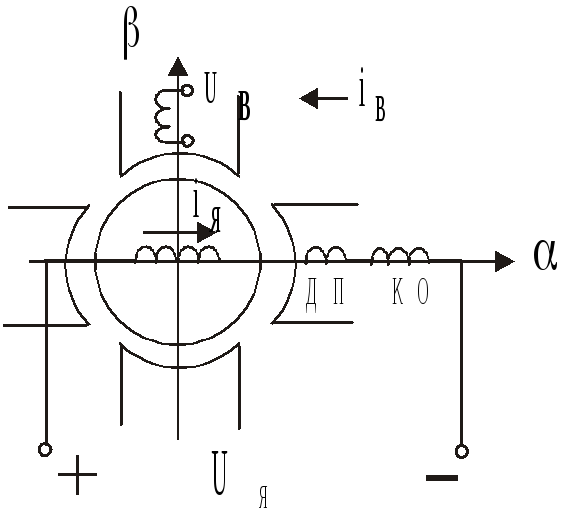 то
значит, что в осях ,
действительным переменным токам обмоток
ротора эквивалентна одна якорная
обмотка, расположенная по оси ,
обтекаемая постоянным током iя,
которая создает магнитное поле,
неподвижное в пространстве и направленное
по оси ,
совпадающей с осью щеток двигателя. По
оси
обмотки ротора нет, о чем говорит то,
что ток в такой обмотке равен 0.
то
значит, что в осях ,
действительным переменным токам обмоток
ротора эквивалентна одна якорная
обмотка, расположенная по оси ,
обтекаемая постоянным током iя,
которая создает магнитное поле,
неподвижное в пространстве и направленное
по оси ,
совпадающей с осью щеток двигателя. По
оси
обмотки ротора нет, о чем говорит то,
что ток в такой обмотке равен 0.
В реальной машине по оси щеток направлены также МДС
0.
Поэтому
![]() и для нерегулируемых двигателей:
и для нерегулируемых двигателей:
![]() .
.
Аналогично сопротивление динамического торможения для нерегулируемых ДНВ
![]() Для
регулируемых двигателей за начальную
скорость торможения принимается max
скорость в двигательном режиме при
наименьшем Мс.
Тогда
Для
регулируемых двигателей за начальную
скорость торможения принимается max
скорость в двигательном режиме при
наименьшем Мс.
Тогда
![]() .
.
В
случае торможения ДНВ с ослабленным
потоком, надо учитывать, что до начала
торможения двигатель работает с
повышенной скоростью макс
и ухудшенными условиями коммутации,
приводящим к снижению величины Iдоп.
Поэтому в расчетные формулы вместо Iдоп
нужно подставлять
![]() .
.
Расчет
тормозного сопротивления для режима
дин. торможения двигателя смешан возбужд
(ДСВ) с подпиткой последовательной
обмотки такое же как и Rm
для двигателя последовательного
возбуждения. Если последов-я обмотка
при торможении отключается (шунтируется),
в выражении:
![]() ,
подставляется Емакс,
определяемая только потоком параллельной
обмотки возбуждения, т.к. при вращении
включенного в сеть ДСВ со скоростью 0
его ЕДС=Uсети
и через последовательную обмотку
возбуждения тока не проходит. Поэтому
,
подставляется Емакс,
определяемая только потоком параллельной
обмотки возбуждения, т.к. при вращении
включенного в сеть ДСВ со скоростью 0
его ЕДС=Uсети
и через последовательную обмотку
возбуждения тока не проходит. Поэтому
![]() ,
откуда
,
откуда
![]() .
0
берется из естественной хар-ки двигателя,
а макс
– из той же хар-ки по минимально возможному
МС.
Сопротивление включаемое в цепь якоря
для режима генераторного торможения с
рекуперацией энергии в сеть, в случае
ДНВ, когда >0,
определяется исходя из следующего:
.
0
берется из естественной хар-ки двигателя,
а макс
– из той же хар-ки по минимально возможному
МС.
Сопротивление включаемое в цепь якоря
для режима генераторного торможения с
рекуперацией энергии в сеть, в случае
ДНВ, когда >0,
определяется исходя из следующего:
![]() ,
откуда полное сопротивление якорной
цепи:
,
откуда полное сопротивление якорной
цепи:
![]() ,
где m
– скорость, необходимая при тормозном
спуске груза, а Im
тормозной ток, которым задаются. Тормозное
сопротивлении
,
где m
– скорость, необходимая при тормозном
спуске груза, а Im
тормозной ток, которым задаются. Тормозное
сопротивлении
![]() Можно определить Rm
задаваясь не тормозным током, а тормозным
моментом Мm:
Можно определить Rm
задаваясь не тормозным током, а тормозным
моментом Мm:
 Подставляя сюда вместо
скорость, с которой желательно спускать
груз, равную m,
а вместо M – величину тормозного момента,
получим
Подставляя сюда вместо
скорость, с которой желательно спускать
груз, равную m,
а вместо M – величину тормозного момента,
получим
![]() ,
откуда
,
откуда
![]() .
.
значение тока I2,
а следовательно, этим самым и наклон
прямой gd.
На приведенном графике получилось 3
ступени реостата. Из построения ясно,
что отрезок fn
соответствует сопротивлению 1-й, кр
–2-ой и mc-3й
ступеням реостата. В момент пуска (=0)
ток в якоре равен I1
(соответственно момент М1),
а сопротивления якорной цепи
![]() .
При разгоне до скорости 1
ток (момент) будет падать, а величина
сопротивления в якорной цепи не изменится.
В т.f
сопротивление то же, а ток равен I2(момент
М2).
При скорости 1
происходит отключение первой ступени,
общее сопротивление якорной цепи
становится равным отрезку ns,
а ток вновь достигает значения I1
и т.д. пока двигатель не станет работать
на естественной характеристике.
.
При разгоне до скорости 1
ток (момент) будет падать, а величина
сопротивления в якорной цепи не изменится.
В т.f
сопротивление то же, а ток равен I2(момент
М2).
При скорости 1
происходит отключение первой ступени,
общее сопротивление якорной цепи
становится равным отрезку ns,
а ток вновь достигает значения I1
и т.д. пока двигатель не станет работать
на естественной характеристике.
М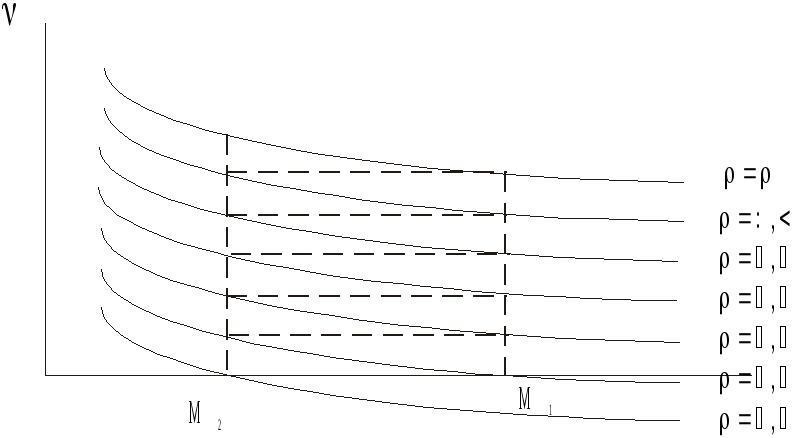 ожно
определить сопротивления ступеней
пускового реостата, имея семейство
универсальных хар-ик в относительных
единицах для ряда значений сопротивления
якорной цепи. Отложив по оси абсцисс
допустимые колебания тока (момента),
осуществляется выбор ступеней
сопротивлений ступеней путем подбора
подходящих из характеристик или даже
путем проведения от руки новых
характеристик (в пределах допустимых
колебаний момента (тока)), соблюдая при
этом пропорциональность в расположении
точек между смежными характеристиками.
ожно
определить сопротивления ступеней
пускового реостата, имея семейство
универсальных хар-ик в относительных
единицах для ряда значений сопротивления
якорной цепи. Отложив по оси абсцисс
допустимые колебания тока (момента),
осуществляется выбор ступеней
сопротивлений ступеней путем подбора
подходящих из характеристик или даже
путем проведения от руки новых
характеристик (в пределах допустимых
колебаний момента (тока)), соблюдая при
этом пропорциональность в расположении
точек между смежными характеристиками.
неизменным,
следовательно, постоянными будут
величины
![]() .
.
Тогда
![]() ,
т.е. скорость двигателя при
,
т.е. скорость двигателя при
![]() является линейной функцией сопротивления
цепи якоря.
является линейной функцией сопротивления
цепи якоря.
Для построения
искусственных характеристик в I
квадранте строится естественная
электромеханическая характеристика
двигателя. По оси абсцисс влево от начала
координат откладывается сопротивление
цепи якоря. Во II
квадранте проводится вертикальная
линия отстоящая от начала координат на
расстояние (0а), соответствующее в
масштабе сопротивлений, сопротивлению
двигателя
![]() .Задаваясь
некоторым значением тока IЯ1,
проводится вертикаль до пересечения с
естественной характеристикой в т.1.
После этого в осях
и R
ищут прямую
.Задаваясь
некоторым значением тока IЯ1,
проводится вертикаль до пересечения с
естественной характеристикой в т.1.
После этого в осях
и R
ищут прямую
![]() ,
соответствующую току
,
соответствующую току
![]() :
Одной из точек искомой прямой является
т.1`. Другая точка находится на оси
абсцисс. Ей соответствует =0
при
:
Одной из точек искомой прямой является
т.1`. Другая точка находится на оси
абсцисс. Ей соответствует =0
при
![]() .
Сопротивление якорной цепи при =0,
соответствующее этой точке равно:
.
Сопротивление якорной цепи при =0,
соответствующее этой точке равно:![]() .
Откладывая на оси абсцисс значения
этого сопротивления, получим т.1``.
Соединяя прямой точки 1` и 1``, получим
искомую зависимость
.
Откладывая на оси абсцисс значения
этого сопротивления, получим т.1``.
Соединяя прямой точки 1` и 1``, получим
искомую зависимость
![]() при
при
![]() .
Так же строятся прямые для значения
токов IЯ2,
IЯ3
и т.д. Для построения искусственной
хар-ки, соответствующей сопротивлению
якорной цепи RХ,
по оси абсцисс откладывается величина
этого сопротивления и через точку Х
проводится вертикаль, пересекающаяся
с прямыми
.
Так же строятся прямые для значения
токов IЯ2,
IЯ3
и т.д. Для построения искусственной
хар-ки, соответствующей сопротивлению
якорной цепи RХ,
по оси абсцисс откладывается величина
этого сопротивления и через точку Х
проводится вертикаль, пересекающаяся
с прямыми
![]() ,
,
![]() и т.д. в точках b,
c,
d.
Она определяет скорости вращения
двигателя на искусственной характеристике
при соответствующих значениях токов.
Перенеся точки b,
c,
d
на вертикали
и т.д. в точках b,
c,
d.
Она определяет скорости вращения
двигателя на искусственной характеристике
при соответствующих значениях токов.
Перенеся точки b,
c,
d
на вертикали
![]() ,
,
![]() ,
,
![]() ,
получим точки e,
f,
g
и т.д., принадлежащие искусственной
характеристике
,
получим точки e,
f,
g
и т.д., принадлежащие искусственной
характеристике
![]() .
Соединяя плавной кривой эти точки,
получим искусственную характеристику.
.
Соединяя плавной кривой эти точки,
получим искусственную характеристику.
полярность
якоря или обмотки возбуждения так, чтобы
ток в последней имел такое же направление,
что и в режиме, предшествующему тормозному
(см. схемы). Так же необходимо чтобы
выполнялось условие: ЭДС якоря,
определяемая величиной Ф и скоростью
вращения была больше падения напряж в
сопр. тормозного контура, т.е.
![]() .
.
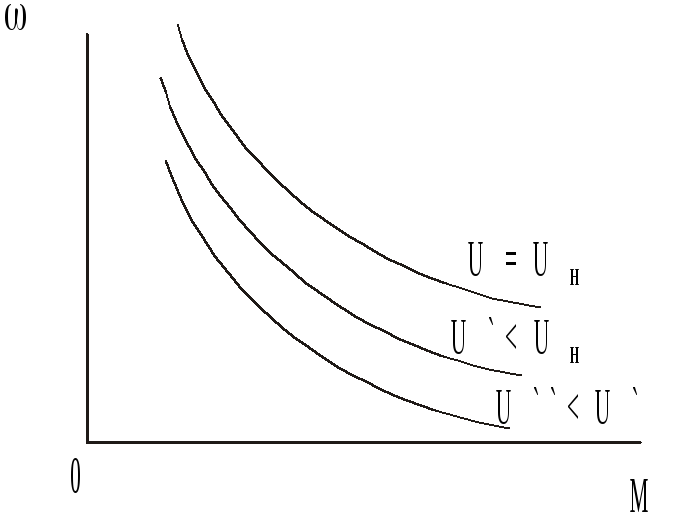
Р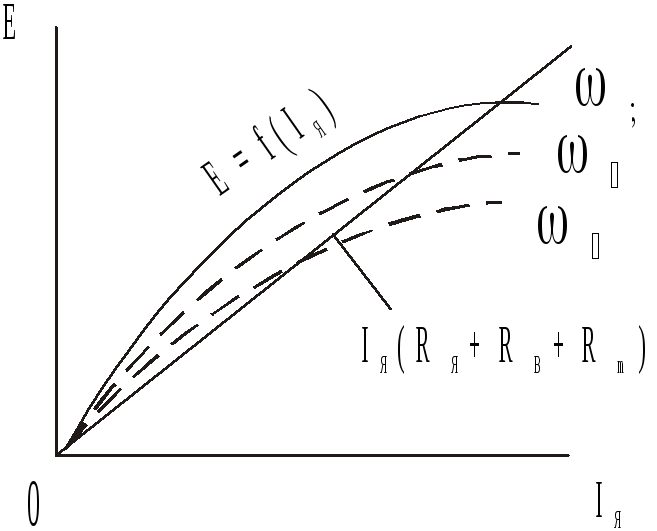 ежим
работы двигателя определится при
пересечении кривой
ежим
работы двигателя определится при
пересечении кривой
![]() скорости вращения с линией, характеризующей
падение напряжения
скорости вращения с линией, характеризующей
падение напряжения
![]() .
Для каждой машины кривая
.
Для каждой машины кривая
![]() лежит тем выше, чем больше скорость
вращения, а наклон прямой
лежит тем выше, чем больше скорость
вращения, а наклон прямой
![]() тем больше, чем больше
тем больше, чем больше
![]() (см. рис.). Скорость, при которой машина
может самовозбуждаться, (при замыкании)
т.е. при
(см. рис.). Скорость, при которой машина
может самовозбуждаться, (при замыкании)
т.е. при
![]() .
.
Скорость, где
самовозбуждения не произойдет, наз.
критической. Ей соответствует критич-ое
сопротивление:
![]() .
.
На графиках видно что при каждом Rm торможение осущ в узкой зоне скоростей. Для торможения до малых скоростей необходимо при снижении скорости уменьшать Rm.
Д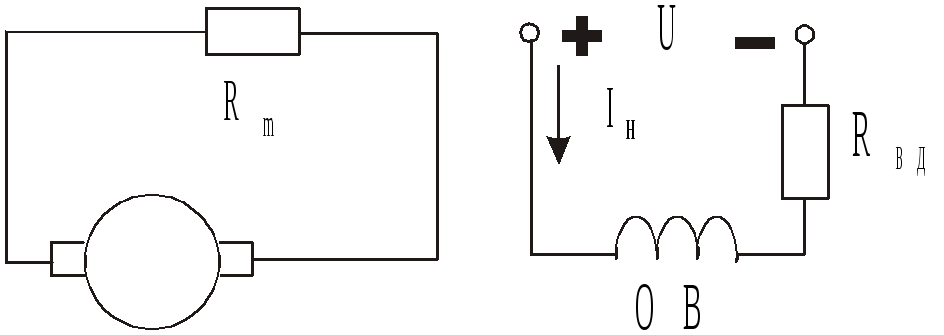 ин
торможение ДПВ независимым возбуждением:
якорь двигателя замыкается на тормозное
сопр, а обмотка возбужд подключ к сети
ч/з сопротивление (см рис.), ограничивающее
ток в ней до номинальной величины. Т.к.
в этом случае двигатель работает
генератором с независимым возбуждением,
его характеристики подобны характеристикам
ДНВ при динамическом торможении и
приведены на графике. Все они пересекаются
в начале координат.Следует отметить,
что динамическое торможение с
самовозбуждением используется как
аварийное.
ин
торможение ДПВ независимым возбуждением:
якорь двигателя замыкается на тормозное
сопр, а обмотка возбужд подключ к сети
ч/з сопротивление (см рис.), ограничивающее
ток в ней до номинальной величины. Т.к.
в этом случае двигатель работает
генератором с независимым возбуждением,
его характеристики подобны характеристикам
ДНВ при динамическом торможении и
приведены на графике. Все они пересекаются
в начале координат.Следует отметить,
что динамическое торможение с
самовозбуждением используется как
аварийное.
С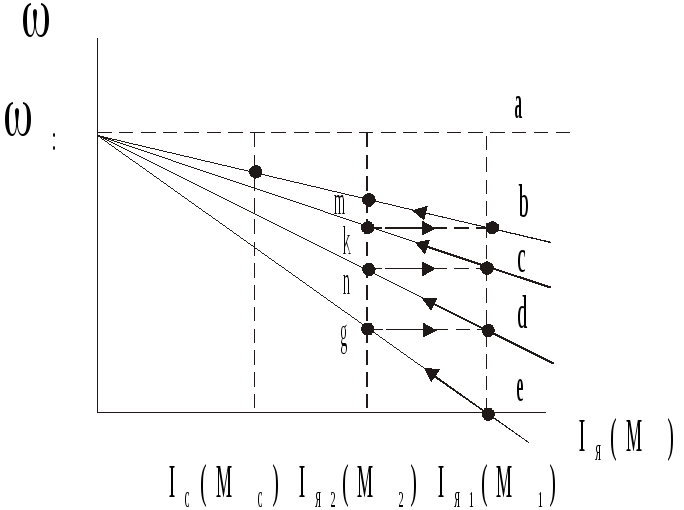
 оединив
т. е с т. 0,
получим пусковую характеристику при
работе с полным добавочным сопротивлением.
Т.к. ток
оединив
т. е с т. 0,
получим пусковую характеристику при
работе с полным добавочным сопротивлением.
Т.к. ток
![]() ,
двигатель начнет разгоняться, а ток
якоря будет уменьшаться. По достижении
им значения, равного IЯ2,
часть сопротивления отключается, ток
скачком возрастает до значения IЯ
и двигатель переходит для работы на
новой характеристике (от т.d),
на которой он будет работать до т.n,
где выключается следующая ступень
пускового сопротивления и т.д. до выхода
на естественную характеристику в т.b.
Если это не получится, необходимо
изменить значение тока IЯ2
и выполнить построение пусковой диаграммы
заново т.о., чтобы переход с последней
пусковой характеристики на естественную
произошел именно при токе IЯ1
(в т. в). Обозначив сопротивление якорной
цепи при пуске Rm
(см. схему включения сопротивлений на
рис.), на 2-й через Rm-1
и т.д., то сопротивлению Rm
на пусковой диаграмме соответствует
отрезок ае, сопротивлению Rm-1
– отрезок ad
и т.д. Отключаемым на каждой ступени
сопротивлениям соответствуют отрезки
de,cd,bc.
Масштаб сопротивлений можно найти
исходя из отрезка ав и известной величины
RЯ.
Но т.к. отрезок ав невелик и это может
вызвать большую погрешность, удобнее
находить масштаб по отрезку ае. Этому
отрезку соответствует
,
двигатель начнет разгоняться, а ток
якоря будет уменьшаться. По достижении
им значения, равного IЯ2,
часть сопротивления отключается, ток
скачком возрастает до значения IЯ
и двигатель переходит для работы на
новой характеристике (от т.d),
на которой он будет работать до т.n,
где выключается следующая ступень
пускового сопротивления и т.д. до выхода
на естественную характеристику в т.b.
Если это не получится, необходимо
изменить значение тока IЯ2
и выполнить построение пусковой диаграммы
заново т.о., чтобы переход с последней
пусковой характеристики на естественную
произошел именно при токе IЯ1
(в т. в). Обозначив сопротивление якорной
цепи при пуске Rm
(см. схему включения сопротивлений на
рис.), на 2-й через Rm-1
и т.д., то сопротивлению Rm
на пусковой диаграмме соответствует
отрезок ае, сопротивлению Rm-1
– отрезок ad
и т.д. Отключаемым на каждой ступени
сопротивлениям соответствуют отрезки
de,cd,bc.
Масштаб сопротивлений можно найти
исходя из отрезка ав и известной величины
RЯ.
Но т.к. отрезок ав невелик и это может
вызвать большую погрешность, удобнее
находить масштаб по отрезку ае. Этому
отрезку соответствует
![]() .
.
Н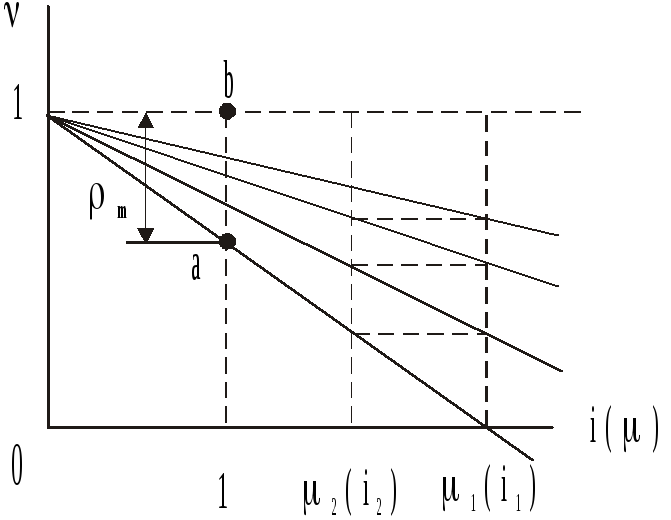 аиболее
прост и нагляден расчет пусковых
сопротивлений в относительных единицах.
аиболее
прост и нагляден расчет пусковых
сопротивлений в относительных единицах.
При этом аналогично рассмотренному выше задаются значениями пускового и переключающего моментов М1, М2 и строится пусковая диаграмма.
Находить номинальный
момент по мощности двигателя и скорости
будет неверным, т.к. отношение
![]() -
это момент на валу, а не электромагнитный.
-
это момент на валу, а не электромагнитный.
Искусственная
характеристика, соответствующая введению
в цепь якоря добавочного сопротивления,
рассчитывается и строится также по двум
точкам: =0;
М=0 и М=МН
и =НИ,
причем НИ
находится как
![]() или
или
![]() .
.
Механическая характеристика может быть построена и по точкам с координатами:
=0;
М=0 и =0;
![]() .
.
С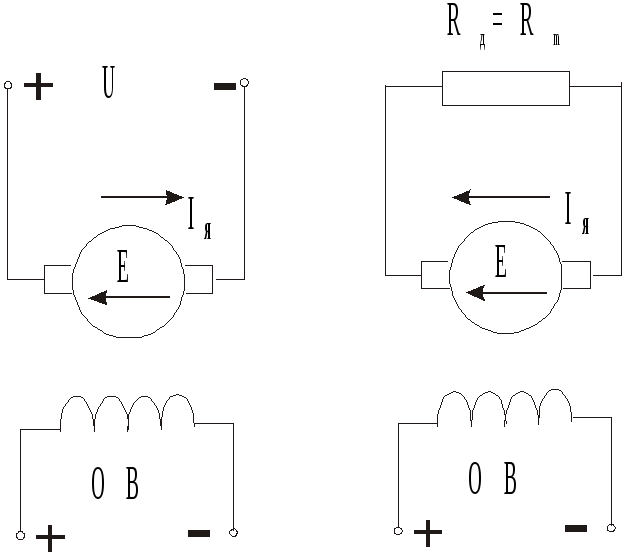
 уть
этого способа торможения заключается
в том, что якорь отключается от сети и
замыкается на тормозное сопротивление
уть
этого способа торможения заключается
в том, что якорь отключается от сети и
замыкается на тормозное сопротивление
![]() ,
а обмотка возбуждения остается
подключенной к сети, как показано на
рис.
,
а обмотка возбуждения остается
подключенной к сети, как показано на
рис.
В этом случае машина работает генератором. Кин. энергия, запасенная в двигателе и вращающихся частях приводимого им механизма, преобразуется в электр. и рассеивается в форме тепла в сопротивлении якорной цепи. Поэтому, как и в режиме противовключения понятие КПД здесь утрачивает смысл.
Вследствие того,
что ЭДС двигателя по направлению остается
такой же, как и до торможения, а напряжение
к якорю не приложено, ток, текущий под
действием этой ЭДС, из уравнения
равновесия
![]()
![]() .
.
Т.к.
при динамическом торможении U=0,
то
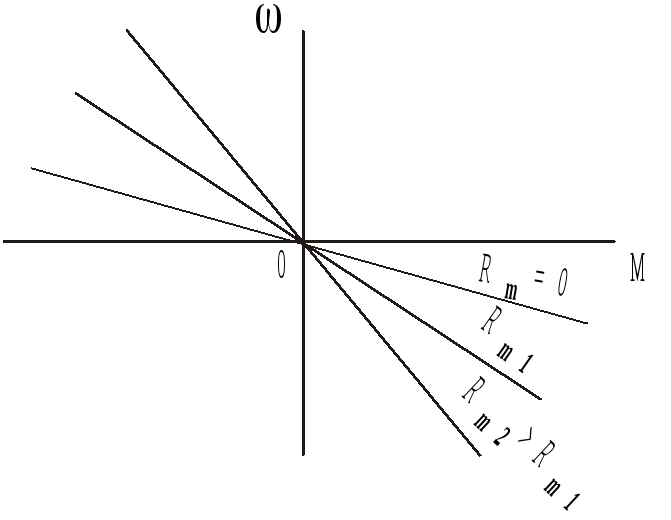
![]() и уравнение механической характеристики
имеет вид:
и уравнение механической характеристики
имеет вид:
![]() .
.
Момент, развиваемый двигателем, является тормозным. Семейство характеристик, соответствующих различным сопротивлениям, на которые замкнут якорь, изображено выше. Все они проходят через начало координат. Наиболее интенсивное торможение получается при замыкании якоря накоротко. При этом характеристика динамического торможения будет параллельна естественной. Однако по условиям ограничения первоначального броска тока замыкание якоря накоротко допустимо только при торможении на малых скоростях.
Обычно динамическое торможение осуществляется при номинальном потоке и широко применяется в эл.приводах, где требуется точная остановка. Оно может быть использовано и для тормозного спуска груза. Установившейся режим спуска будет иметь место при скорости определяемой точкой пересечения линии статического момента и механического характеристики (т. С на графике).
С энергетической т.з. дин.торможение выгоднее противовключения, т.к. в процессе торможения из сети потребляется энергия только цепью возбуждения.
Динамическое торможение надежно, обеспечивает плавность торможения, можно получить характеристики с малой крутизной. Недостатком является уменьшение тормозного момента двигателя по мере снижения скорости, т.е. при снижении скорости оно становится малоэффективным
скорость мгновенно не изменится, а двигатель окажется работающим на искусственной характеристике, соответствующей пониженному напряжению (см. рис.) в т.2 в генераторном режиме, развивая тормозной момент. Скорость, так же и тормозной момент, начнут уменьшаться, причем до т. А торможение сопровождается отдачей энергии в сеть, а с т. А до новой установившейся скорости 2 в т.2, начнется замедление с потреблением энергии из сети.
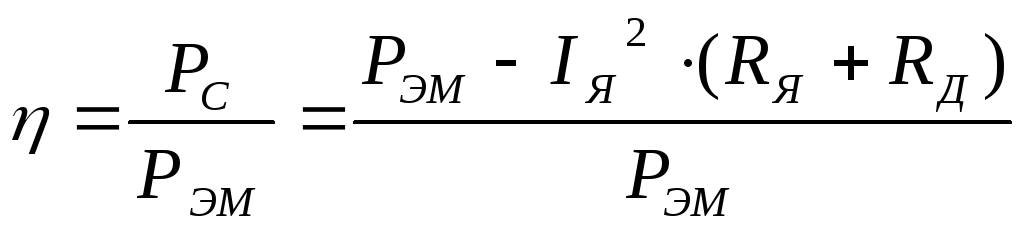
Генераторное
торможение с отдачей энергии в сеть
экономично, т.к. сопровождается отдачей
энергии в сеть. Мощность, отдаваемая в
сеть
![]() ,
где RД
– добавочное сопротивление, которое в
общем случае может иметься. КПД машины
в этом режиме
,
где RД
– добавочное сопротивление, которое в
общем случае может иметься. КПД машины
в этом режиме
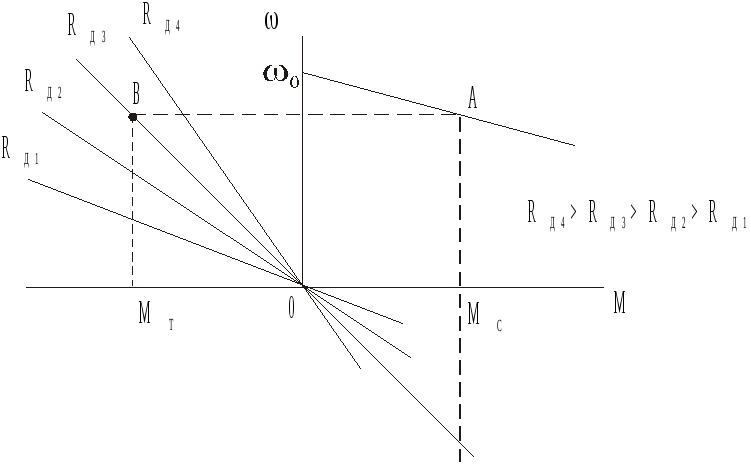
Торможение противовключением.
П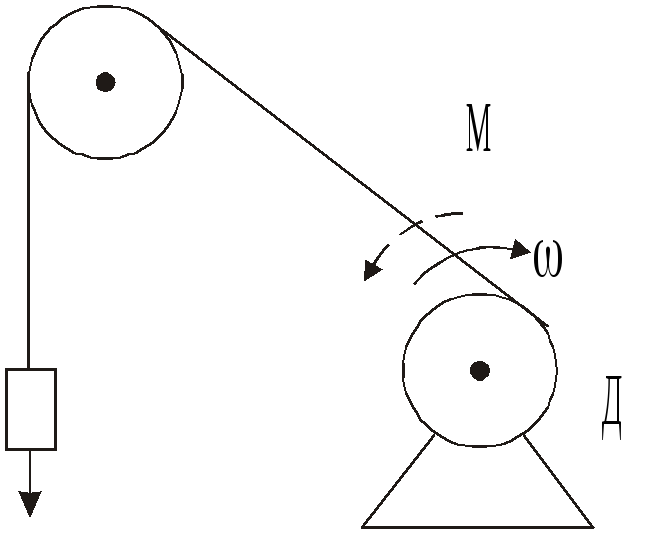
 ротивовключением
называется режим, когда двигатель
включен для одного направления вращения,
а якорь его под действием внешнего
момента или инерции вращается в
противоположную сторону. При этом момент
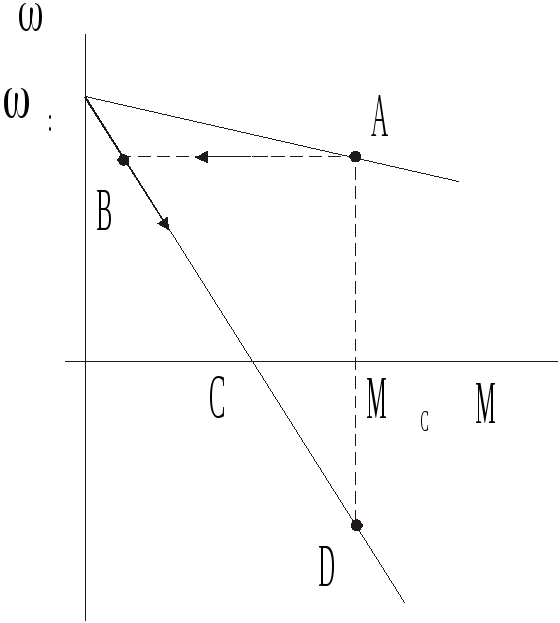
двигателя противодействует движению.
Такой режим может использоваться при
активном моменте сопротивления для
тормозного спуска груза. Если в цепь
якоря двигателя, поднимающего груз,
включить большое добавочное сопротивление,
двигатель окажется работающим на
искусственной характеристики с большой
крутизной, на которой при скорости
переключения (т. В см. рис.) момент,
развиваемый двигателем, будет меньше
статического МС
и двигатель будет замедляться и
остановится в т. С. А затем под действием
груза начнет вращаться в противоположном
направлении. Начнется спуск груза.
Установившаяся скорость тормозного
спуска будет в т. Д. Т.к. направление
магнитного потока осталось прежним,
ЭДС двигателя изменит свой знак и будет
действовать согласно с напряжением
сети. Ток, потребляемый двигателем из
сети, станет равным:
ротивовключением
называется режим, когда двигатель
включен для одного направления вращения,
а якорь его под действием внешнего
момента или инерции вращается в
противоположную сторону. При этом момент
двигателя противодействует движению.
Такой режим может использоваться при
активном моменте сопротивления для
тормозного спуска груза. Если в цепь
якоря двигателя, поднимающего груз,
включить большое добавочное сопротивление,
двигатель окажется работающим на
искусственной характеристики с большой
крутизной, на которой при скорости
переключения (т. В см. рис.) момент,
развиваемый двигателем, будет меньше
статического МС
и двигатель будет замедляться и
остановится в т. С. А затем под действием
груза начнет вращаться в противоположном
направлении. Начнется спуск груза.
Установившаяся скорость тормозного
спуска будет в т. Д. Т.к. направление
магнитного потока осталось прежним,
ЭДС двигателя изменит свой знак и будет
действовать согласно с напряжением
сети. Ток, потребляемый двигателем из
сети, станет равным:
![]()
т.е. станет значительно больше, чем в двигательном режиме. Возрастет и величина момента двигателя, который по отношению к вращающемуся в противоположном направлении якорю является тормозным. Для ограничения тока и момента значениями, допустимыми по условиям коммутации, в цепь якоря
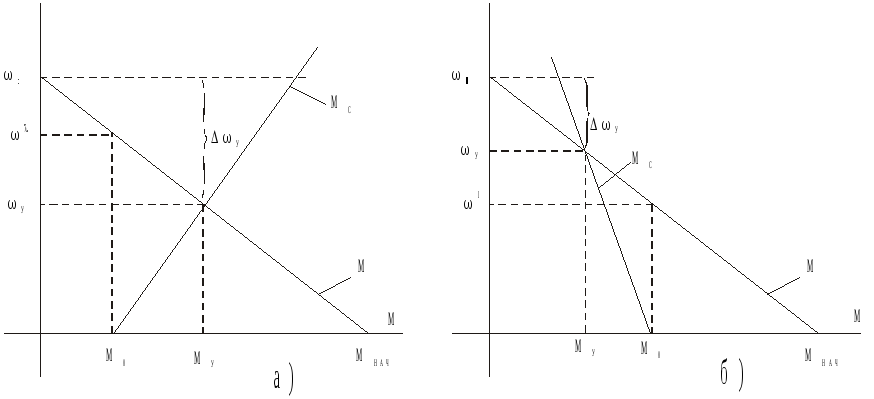 При
Мс=М0+К1
ω
(рис.”a”)
и Мс=М0-К1
ω
(рис.”б”) переходный процесс описывается
этими же уравнениями, что и при Мс=К
ω,
но в них
При
Мс=М0+К1
ω
(рис.”a”)
и Мс=М0-К1
ω
(рис.”б”) переходный процесс описывается
этими же уравнениями, что и при Мс=К
ω,
но в них
![]()
При вентиляторном моменте сопротивления дифференциальное уравнение, отражающее переходный процесс, имеет вид
![]()
Хотя это уравнение решить можно, однако конечные результаты мало пригодны для практического использования. Поэтому на практике чаще используются графические и графоаналитические методы. Естественно, что такие методы дают лишь приближенные результаты, однако, при тщательном выполнении их точность достаточна для решения практических задач.
![]()
отсюда
![]()
Т.о. законы изменения ω и М будут такими:

![]()
При
![]() корни р1=-α1
; р2=-
α
2 и общее
решение дифференциальных уравнений
относительно ω
и М имеет вид
корни р1=-α1
; р2=-
α
2 и общее
решение дифференциальных уравнений
относительно ω
и М имеет вид
![]()
![]() Постоянные
интегрирования определяются аналогично
предыдущему случаю исходя из начальных
условий. Законы изменения ω
и М будут
такими:
Постоянные
интегрирования определяются аналогично
предыдущему случаю исходя из начальных
условий. Законы изменения ω
и М будут
такими:

![]()
При
![]() , что бывает в редких случаях, р1=р2=α
и общее решение дифференциальных
уравнений относительно ω
и М имеет вид
, что бывает в редких случаях, р1=р2=α
и общее решение дифференциальных
уравнений относительно ω
и М имеет вид
![]()
![]()
Коэффициенты А2, В2, С2, D2 находятся из начальных условий.
Полученные общие зависимости в частных случаях существенно упрощаются, если до начала переходного процесса режим работы электропривода был установившимся.
Во всех случаях,
когда двигатель работает на реостатных
характеристиках, Тэ пренебрежительно
мала и можно считать ее равной 0. Если
электромеханическая связь в системе
электропривода является жесткой,
уравнения переходного процесса можно
получить из соотношений для случая m>4,
положив в них
![]() и
и
![]()