

9 Определение передаточной функции промежуточного усилителя.
В современных тиристорных приводах постоянного тока для улучшения статических и динамических характеристик системы в промежуточные усилители вводятся различные корректирующие цепи, чем обеспечивается регулирование необходимых динамических свойств системы.
В системах позиционирования статическая ошибка при поступательном движении механизма определяется из выражения:
![]() ,где
,где
К – коэффициент усиления разомкнутой системы;
ρ – приведённый радиус;
F – максимальная сила сопротивления механизма;
β – жёсткость механической характеристики системы,
![]() - заданная погрешность
позиционирования,
- заданная погрешность
позиционирования,
![]()
 ,
где
,
где
Vy max – максимальная установленная скорость движения механизма
![]() y
max
– максимальная угловая скорость
двигателя;
y
max
– максимальная угловая скорость
двигателя;
Ошибка слежения при установившемся вращательном движении механизма с максимальной скоростью:
![]() ,
,
где Vy max– максимальная скорость движения механизма.
Суммарная ошибка не должна превышать заданной ошибки:
![]()
Откуда, подставив числовые значения:
 =>
=>
К ≥ 30850
Необходимый коэффициент разомкнутой системы примем КРС=40000.

Т.к. коэффициент разомкнутой системы равен примерно 100 (из графика ЛАХ), а требуемый коэффициент должен быть равен 40000, то принимаем коэффициент промежуточного усилителя
КПУ=400
Реализация промежуточного усилителя на базе операционного усилителя:
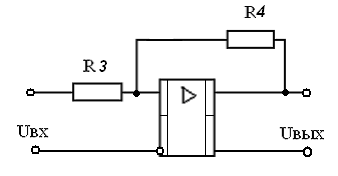
Рис. 4 Реализация промежуточного усилителя
R4/R3=400, примем R4=400 кОм, тогда R3=1 кОм.
10 Настройка контура позиционирования
Рассмотрим контур позиционирования:
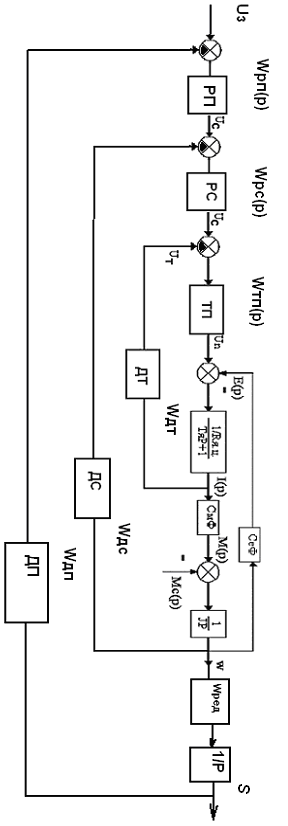
Рис. 5 Контур позиционирования
Частотные характеристики и переходный процесс такого некорректированного контура (без промежуточного усилителя и регулятора положения) имеют вид:
Применив промежуточный усилитель, получаем следующие ЛАХ и ЛФХ:

Как видно, система является неустойчивой, т.к. график ЛФХ пересекает -180 градусов раньше, чем ЛАХ пересекает 0.
Для достижения нужных свойств (точности, времени переходного процесса, запасов устойчивости по модулю порядка 12 дб и по фазе порядка 30-50 градусов), в контуре положения применим регулятор, который, не изменяя Крс, изменил бы соответствующим образом наклон и форму кривых ЛАХ и ЛФХ. Таким регулятором может быть ИД-регулятор, передаточная функция которого:
![]()
Техническая реализация такого регулятора приведена на рисунке.
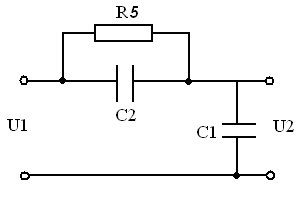
Рис. 6 Реализация регулятора положения
Где: T1=R5*C2, T2=(1+C1/C2)*T1
Примем С2=100 пФ, тогда R5=1 МОм, С1=10 мкФ
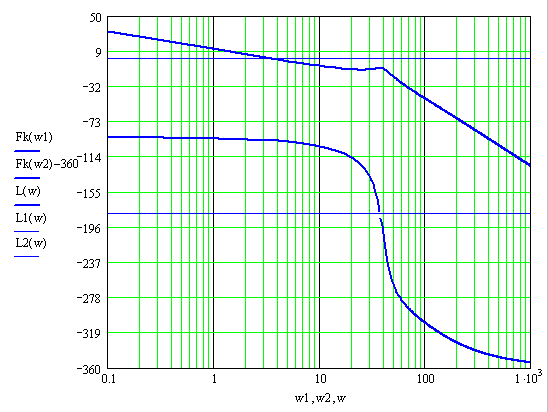
Применив такой регулятор, получаем следующие логарифмические характеристики:
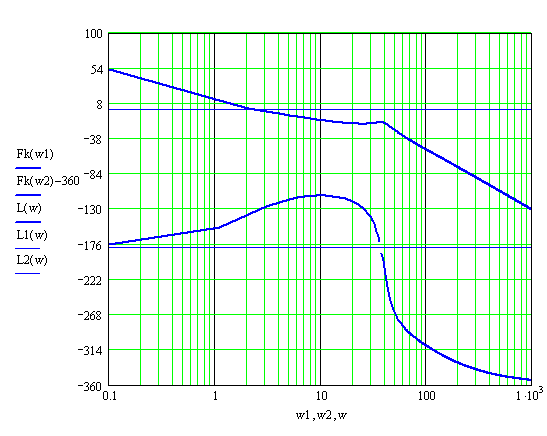
Рис. 7 ЛАХ и ЛФХ корректированного контура положения
Как видно из графиков, запас устойчивости по модулю порядка 12 дб, по фазе порядка 45 градусов.
11 Структурная схема сар положения
Структурная схема САР положения будет выглядеть следующим образом:
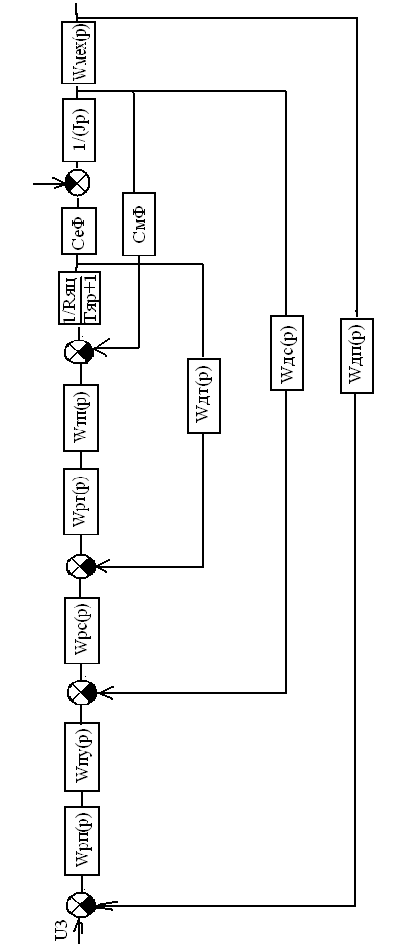
Рис. 8 Структурная схема САР положения
12 Исследование и анализ переходных процессов
При отсутствии момента сопротивления и подаче задающего напряжения 10 В, соответствующего 5 миллиметрам перемещения механизма, переходный процесс имеет следующий вид:
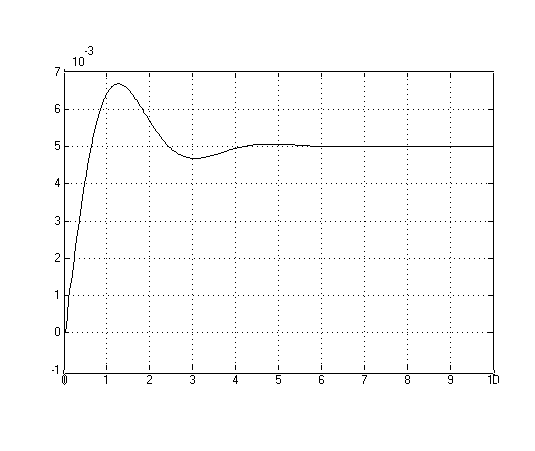
Время переходного процесса 5.7 секунды, перерегулирование составляет 30%.
Ток якоря:

При появлении максимального момента сопротивления на 4 секунде, график переходного процесса примет вид:

Как видно из графиков, выходная координата отклоняется на 0.015 миллиметра, что соответствует заданным параметрам качества (<=0.05 миллиметра).