

1 Функциональная схема сар положения
Упрощённая функциональная схема САР положения приведена на рисунке 1:

Рис.1 Функциональная схема САР
На рисунке:
РП – регулятор положения
ДП – датчик положения
РС –регулятор скорости
ДС – датчик скорости (тахогенератор)
ДТ – датчик тока
РТ – регулятор тока
ТП – тиристорный преобразователь
Редуктор
Механизм
2 Выбор мощности электродвигателя
Выбор мощности электродвигателя произведём по методу эквивалентных величин.
Мощность выбираемого электродвигателя должна удовлетворять условию:
 ,
где
,
где
РДВ – мощность двигателя,
FC MAX – максимальная сила сопротивления,
VMAX – максимальная скорость перемещения механизма,
![]() РЕД
– КПД редуктора
РЕД
– КПД редуктора
![]()
По справочнику выбираем электродвигатель с номинальной мощностью не менее 200 Вт: двигатель ПБСТ22 на 220 В со встроенным тахогенератором ТС-1.
-
Наименование параметра
Значение
Частота вращения n, об/мин
1500
Мощность номинальная РН, Вт
600
Ток номинальный IН, А
3.4
Момент номинальный МН , Н*м
3.9
КПД, %
76
Частота вращения максимальная nmax, об/мин
3750
Момент инерции, кг*м2
0,012
Число пар полюсов, 2p
4
Сопротивление обмотки якоря RЯ, Ом
3.43
Сопротивление обмотки дополнительных полюсов RД,Ом
2.18
Номинальное напряжение UН, В
220
Проверку двигателя проведём по методу эквивалентных величин:
![]() , где
, где
МЭКВ – эквивалентный момент,
МДВ НОМ – номинальный момент двигателя
Величину эквивалентного момента высчитывают по формуле:
 , где
, где
МП – пусковой момент
МТ – момент торможения
М* max– максимальный приведённый момент
М*min – минимальный приведённый момент
tП – время пуска
tТ – время торможения
![]() - коэффициент,
учитывающий условия охлаждения
- коэффициент,
учитывающий условия охлаждения
![]() - коэффициент,
учитывающий условия охлаждения во время
паузы
- коэффициент,
учитывающий условия охлаждения во время
паузы
Для данного типа
двигателя примем
![]()
Коэффициент
![]() можно вычислить по формуле:
можно вычислить по формуле:
![]() =0.975
=0.975
Расчёт моментов пуска и торможения произведём по формулам:
![]()
Получаем
![]() ,
,
![]()
Максимальный приведённый момент равен:
 ,
где
,
где
iред – передаточное отношение редуктора
![]() , где
, где
V мех – скорость перемещения механизма,
wдв – скорость вращения двигателя
![]() ,
,
![]()
Тогда
![]()
Минимальный приведённый момент равен
![]()
Время пуска и торможения вычислим по формулам:
![]() ,
,
![]() ,где
,где
wдв – скорость вращения вала двигателя
J* - приведённый суммарный момент инерции
![]() ,
где
,
где
Jдв – момент инерции ротора двигателя,
Jред – момент инерции редуктора
![]()
Тогда
![]()
Тогда времена пуска и торможения:
tП = 0.157с
tТ = 0.146с
Режим работы механизма повторно-кратковременный, нагрузочная диаграмма выглядит следующим образом:
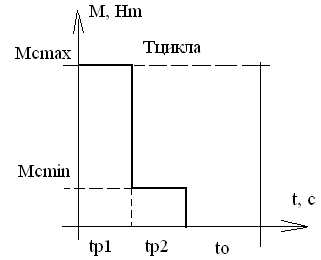
Рис.2 Нагрузочная диаграмма механизма
Выберем режим работы механизма повторно-кратковременный. Относительный коэффициент продолжительности цикла примем 0.8. Минимальное время цикла примем 30 секунд.
Относительный коэффициент продолжительности цикла:
 ,
,
Откуда tp=24 с – время рабочего периода
Тогда
![]()
Время паузы:
t0 = tцикла – tраб = 30 – 24 = 6 с
Произведём расчёт эквивалентного момента:
![]()
1.92> 0.814
Значит, двигатель выбран правильно.