

5 Определение передаточной функции тахогенератора.
Номинальная скорость двигателя равна 157 рад/с. Тогда, учитывая, что в обратную связь подаётся 10В, передаточная функция будет иметь вид:
![]()
![]()
Необходимо согласующее устройство:
![]()
![]()
Тогда передаточная функция датчика скорости:
![]()
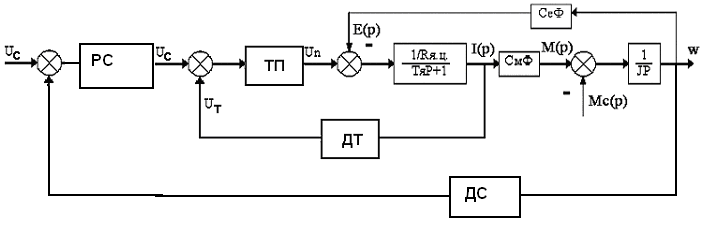
6 Определение передаточных функций датчика положения и датчика тока
Датчики перемещения обеспечивают контроль перемещения с высокой точностью (порядка0.001 мм). Из аналоговых датчиков наибольшее распространение получили индуктивные датчики, имеющие высокие уровни выходных сигналов, обладающие большой надежностью.
Примем диапазон регулирования 5 миллиметров. Тогда, учитывая, что в обратную связь подаётся 10 В, передаточная функция датчика положения с согласующим устройством будет иметь вид:
![]()
Передаточная функция датчика тока определяется следующим образом:
![]() ,
где
,
где
![]() - падение напряжения
на шунтовом сопротивлении,
- падение напряжения
на шунтовом сопротивлении,
![]() - пусковой ток,
- пусковой ток,
![]() - номинальный ток
двигателя.
- номинальный ток
двигателя.
![]()
Сигнал с датчика тока нужно подать на сумматор, выполненный на базе операционного усилителя. Так как в обратную связь принято подавать 10 В, то необходимо согласующее устройство:
![]()
Передаточная функция датчика тока с согласующим устройством:
![]()
7 Определение передаточной функции тиристорного преобразователя
Передаточная функция тиристорного моста вместе с системой импульсно-фазового управления СИФУ, как правило, апроксимируется апериодическим звеном первого порядка с постоянной времени Тт.п.=0,01 с., что обусловлено дискретностью подачи отпирающих импульсов и особенностью работы управляемого тиристорного выпрямителя.
![]() ,
,
где UТП – выходное напряжение тиристорного преобразователя;
Uу – напряжение, подаваемое на вход СИФУ тиристорного преобразователя;
КТП– коэффициент передачи тиристорного преобразователя.
![]()
![]()
8 Настройка контура скорости.
Рассмотрим контур скорости:
Частотные характеристики такого контура имеют вид:

Для достижения нужных свойств (запасы устойчивости по модулю порядка 12 дб и по фазе порядка 30-50 градусов) в контуре скорости необходимо приподнять ЛАХ, для большей устойчивости опустим ЛЧХ опустить вниз. Применим ПИ-регулятор, передаточная функция которого:

Техническая реализация такого регулятора на базе операционного усилителя приведена на рисунке.
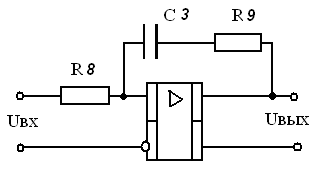
Примем C3= 10 мкФ, тогда
R9= T/C= 10 кОм
R8= 10 кОм
Применив такой регулятор, получаем следующие логарифмические характеристики:

Как видно из графиков, запас устойчивости по модулю порядка 12 дб, по фазе порядка 35 градусов.