

10. Настройка контура тока
Рассмотрим контур тока:
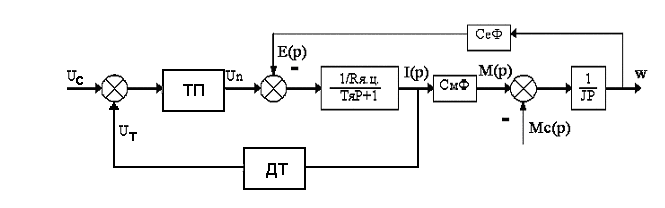
Рис. 5.

Рис. 6.
Переходный процесс в контуре тока:

Рис. 7.
Система устойчива, построим ЛАХ и ЛФХ контура тока:

Рис. 8.
Из графиков видно, система устойчива. Быстродействие системы очень высокое, поэтому нет необходимости применения корректирующего устройства. Запас по фазе составляет Δφ=86,3 град, запас по модулю бесконечно большой.
11. Расчет регулятора скорости.
Рассмотрим контур скорости:

Рис. 9.

Рис. 10.
График переходного процесса скорости:

Рис. 11.
Частотные характеристики контура скорости:

Рис. 12.
Из частотных характеристик следует, что система устойчива. Однако график переходной функции говорит нам о том, что необходим усилитель в контуре скорости. Добавим пропорциональное звено (усилитель рис.13) с передаточной функцией:
W(p)=K.

Рис. 13.
К найдем из формулы K=10L/20, где L найдем из графика на рис. 12:

Рис. 14.
L=37,5 дБ, тогда:
К=1037,5/20=74,9894.
Схему электрическую принципиальную можно видеть на рис. 13.
Посчитаем параметры данного усилителя.
![]() .
.
Принимаем по ГОСТ 2825-47:
R7=1кОм (по стандартному ряду Е6)
![]() кОм
кОм
Принимаем по ГОСТ 2825-47 R8 = 75 кОм (по стандартному ряду Е24).
После добавления данного звена в систему получим следующие графики:

Рис. 15.

Рис. 16.
Данная система имеет запас устойчивости по фазе ∆φ=36,4 градусов, а запас устойчивости по модулю ∆L=7,16 дБ.
12 Настройка контура позиционирования
Рассмотрим контур позиционирования:

Рис. 17.
Частотные характеристики и переходный процесс такого некорректированного контура (без промежуточного усилителя и регулятора положения) имеют вид:

Рис. 18.

Рис. 19.
Из данных графиков очевидно, что система явно неустойчивая. График переходной функции колебателен и бесконечно возрастает. Частотные характеристики так же оставляют желать лучшего.
Очевидно, что система имеет слишком большой коэффициент Крс. Его нужно уменьшить, добавив пропорциональное звено с передаточной функцией W(p)=1/K,, до величины рассчитанного ранее Крс.
Где Крс найдем из формулы:
K=10ΔL/20, где ΔL определим используя график, показанный на рис. 20:

Рис. 20.
Рассчитанная ранее величина Крс составляла 150,31, что соответствует L=43,2794. Тогда ΔL=49,3-43,2794=6,0206.
Подставляем значение ΔL и находим, что:
K=106,0206/20=2.
Тогда
![]() .
.

Рис. 21
Реализуем данное звено. Схему электрическую принципиальную можно видеть на рис. 21. Посчитаем параметры данного усилителя.
![]() .
.
Принимаем по ГОСТ 2825-47:
R1=1кОм (по стандартному ряду Е6)
![]() Ом
Ом
Принимаем по ГОСТ 2825-47 R3 = 510 Ом (по стандартному ряду Е24).
В такой системе без момента нагрузки графики будут иметь следующий вид:

Рис. 22.
Лагорифмические характеристики удовлетворяют требованиям качества так запас по модулю составляет ΔL=4,76 дБ а запас по фазе Δφ=69,3 градусов.
При отсутствии момента сопротивления и подаче задающего напряжения 10 В, соответствующего 5 градусам перемещения механизма, переходный процесс имеет следующий вид:

Рис. 23.
Время переходного процесса 0,05 сек., перерегулирование составляет 8%.
При этом ток якоря будет изменятся следующим образом:

Рис. 24.
График изменения угловой скорости:

Рис. 25.
При появлении максимального момента сопротивления на 0,1 секунде, график переходного процесса примет вид:


Рис. 26.
Из графика видно, что система при максимальном моменте сопротивления отклоняется на 0,0081 градуса, что не превышает допустимую погрешность в 0,5 мин или 0,0083 град.
Наша система является следящей. Посмотрим, как она реагирует на переменный входной сигнал. Подадим на вход системы линейно изменяющийся сигнал и проанализируем графики переходных процессов (рис. 27).
При максимальной нагрузке и максимальной скорости изменения задающего сигнала график имеет следующий вид:

Рис. 27
Максимальная скорость задающего сигнала равна 1,5 1/сек, что равно 85,5 град/сек. Максимальная погрешность слежения составляет δ= 0,5 мин = 0,5/60 град = 0,008 град. Наша ошибка слежения составляет δ =0,0012, что удовлетворяет заданным параметрам качества.