

Лекция 2.2. (4). (24.07.09)
2.2. Характеристики асинхронных электродвигателей.
2.2.1. Расчет характеристик в двигательном режиме.
Расчеты различных режимов АД проводят по схеме его замещения.
Рассмотрим Г-образную схему замещения на рисунке 2.2.1.
Рисунок 2.2.1.
Где S - скольжение.
S = (1 - 2) / 1 ,
1 = 2 * * f1 / p = f/р
f = 2 * * f1
В асинхронных двигателях характеристики очень часто определяются от скольжения. Связь между скоростью вращения и скольжением определяется зависимостью:
2 = 1 * (1 - S )
AV-PRIV.2.2.2. 03.07.06. 24.07.09.
1. Скоростная характеристика, рисунок 2.2.2:
I2 = U1/ Zs где
____________________
Zs = [(R1 + R2Σ / S)2 + Xк2] (2.2.1)
Где: R2Σ = R2’ + R2’внеш;
Хк = Х1 + Х2’
2. Электромагнитная мощность, передаваемая из статора в ротор:
Pem= m1 * I22 * R2Σ / S
3. Момент на валу:
М = Pem / 1 = Pem * p / f = p * m1 * I22 * R2Σ / (S * f) =
= p * m2 *U12 * R2Σ / (S) / ([(R1 + R2Σ / S)2 + Xк2]* f)
M = 9.55 * Pem / n1
n1 = 60 * f1 / p
5. Момент максимальный:
Mmax ≈ m1*p * U12/[2 * f * Xk]=Km*Mн
6. Критическое скольжение:
Sk ≈ R2Σ / Xk
7. Механические характеристики.
Для описания зависимости М=f(S) используется формула Клосса.
M = 2 * Mmax / ( S / Sk + Sm / S )
AV-PRIV.2.2.3. 12.09.05. 03.07.06.
Из которой можно получить следующее выражение.
Sk = Sn * [Km + (Km2-1)]
Скоростная и механическая характеристики асинхронных двигателей приведены на рис 2.2.2.
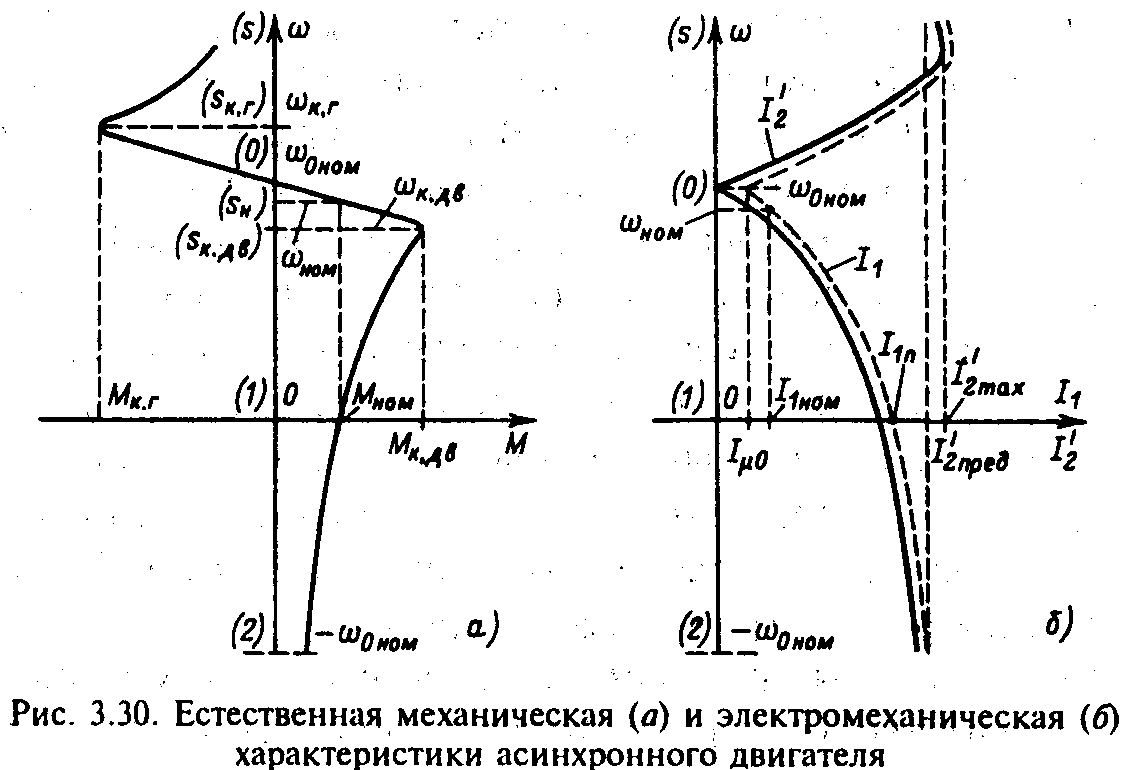
Рис. 2.2.2. Механическая и скоростная характеристики.
Проанализировав полученные результаты можно отметить:
1. Момент двигателя пропорционален квадрату напряжения.
2. Максимальный момент не зависит от сопротивления в цепи ротора.
3. Критическое скольжение пропорционально сопротивлению в цепи ротора и не зависит от напряжения.
4. При малых скольжениях S<0.5*Sk можно положить, что в уравнении
M = 2 * Mmax / ( S / Sk + Sk / S )
S / Sk << Sk / S и:
Упрощенная формула Клосса при малых скольжениях:
M = 2 * Mk * S / Sk (А)
т.e. что момент линейно зависит от скольжения.
AV-PRIV.2.2.4. 03.07.06. 24.01.09.
Согласно схеме замещения:
____________________________________
I2’ = Uн / Zs = U / [(R1 + R2 / S + Rвнешр / S)2 + (X1 + X2)2]
Для рабочего режима можно положить S << 1, следовательно R2 / S >> X22 и R2/S >> R1 и
Zs = R2’ / S и
I2’ = Uн * S/ R2’
или для S:
S = R2’ * I2’ / Uн
Для номинального режима
Sн = R2’ * I2н/ / Uн
Т.к. Uн / Iн = Rн
Sн = R2*
Номинальное скольжение пропорционально сопротивлению в цепи ростра.
5. Модуль статической жесткости механической характеристики является переменной величиной. В начальной части характеристики, при S<0.5*Sk где момент пропорционален скольжению жесткость можно определить из уравнения по упрощенной формуле Клосса:
= dM /d2 = d( 2 * Mk * S / Sk ) / dt =
d{2 * Mk * (1 - 2 ) / (1 Sk)} dt = 2 * Mk / (1 * Sk) (B)
Поскольку по упрощенной формуле Клосса (А)
M = 2 * Mk * S / Sk (А)
AV-PRIV.2.2.5. 12.09.05. 03.07.06.
или
M / S = 2 * Mk / Sk = const = Mн / Sн
Следовательно:
M = Mн * S / Sн = Mн * (1 - 2) / 1 Sн
Подставив в уравнение для определения получим:
= dM /d2 = 2 * Mk / (0 * Sk) = Mн / (1 * Sн)
Если подставлять данные в относительных единицах то Мн = 1
1* = 1 , Sн = R2* получим:
* = 1 / Sн* = 1 / R2*
т.е. c увеличением сопротивления жесткость характеристики снижается.
6. При S>Sk >0, жесткость положительна, что является причиной неустойчивой работы двигателя.
2.2.2. Механические характеристики в тормозных режимах.
В асинхронных двигателей возможны следующие тормозные режимы:
1. Рекуперативное торможение.
2. Торможение противовключением.
3. Динамическое торможение.
1. Рекуперативное торможение имеет место, когда двигатель вращается исполнительным механизмом в сторону вращения поля но быстрее поля.
В этом случае 2>1 и
S = (1 - 2)/ 1 <0
Максимальный момент также отрицателен Мм < 0. механическая характеристика приведена на рис. 2.2.2.
AV-PRIV.2.2.6. 12.09.05. 03.07.06
2. Торможение противовключением.
Режим противовключения имеет место при S>1.
Торможение противовключением асинхронного двигателя осуществляется аналогично торможению противовключением машин постоянного тока.
Для осуществления такого торможения проводят реверсирование двигатель путем перекрестного включения двух фаз статор.
Механическая характеристика приведена на рисунке 2.2.3.
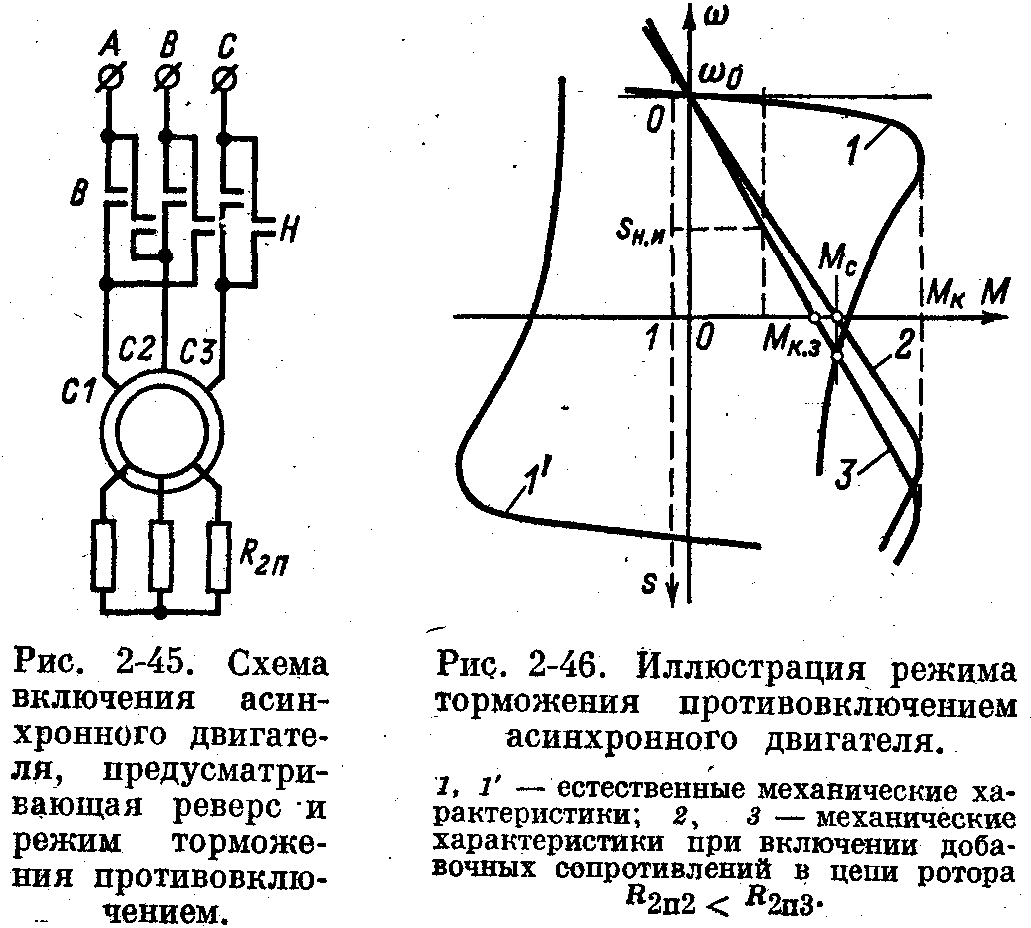
Рисунок 2.2.3. Схема включения и механическая характеристики торможения противовключением.
Достоинства режима:
1. Простота осуществления.
2. Достаточно высокие моменты торможения вплоть до ω=0.
Недостатки:
1. Значительный расход энергии.
2. Повышенный нагрев двигателя.
3. Отсутствие плавности работы.
AV-PRIV.2.2.7. 12.09.05. 03.07.06