

Классификация систем чпу
Системы ЧПУ можно классифицировать по различным признакам.
Исходя из технологических задач управления обработкой все системы ЧПУ делят на три группы: позиционные, контурные и комбинированные.
Позиционные системы ЧПУ обеспечивают управление перемещениями рабочих органов станка в соответствии с командами, определяющими позиции, заданные программой управления. При этом перемещения вдоль различных осей координат могут выполняться одновременно (при заданной постоянной скорости) или последовательно. Данными системами оснащают в основном сверлильные и расточные станки для обработки деталей типа плит, фланцев, крышек и др., в которых производится сверление, зенкерование, растачивание отверстий, нарезание резьбы и др. (например, мод. 2Р135Ф2, 6902МФ2, 2А622Ф2-1).
Контурные системы ЧПУ обеспечивают управление перемещениями рабочих органов станка по траектории и с контурной скоростью, заданными программой управления. Контурной скоростью является результирующая скорость подачи рабочего органа станка, направление которой совпадает с направлением касательной в каждой точке заданного контура обработки. Контурные системы ЧПУ в отличие от позиционных обеспечивают непрерывное управление перемещениями инструмента или заготовки поочередно или сразу по нескольким координатам (рис. ), в результате чего может обеспечиваться обработка очень сложных деталей (с управлением одновременно по более чем двум координатам). Контурными системами ЧПУ оснащены в основном токарные и фрезерные станки (например, мод. 16К20Ф3, 6Р13Ф3).
Р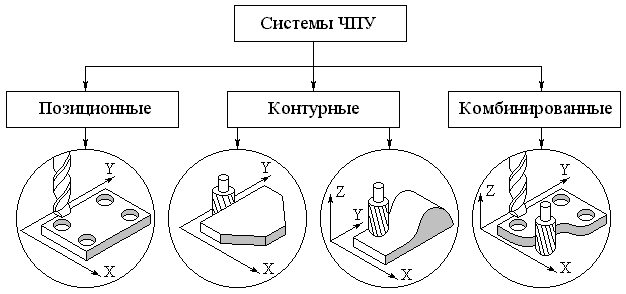 ис.
21 . Классификация систем ЧПУ исходя из
технологических
ис.
21 . Классификация систем ЧПУ исходя из
технологических
задач управления обработкой
Комбинированные системы ЧПУ, сочетающие функции позиционных и контурных систем ЧПУ, являются наиболее сложными, но и более универсальными. В связи с усложнением станков с ЧПУ (особенно многооперационных), расширением их технологических возможностей и повышением степени автоматизации применение комбинированных систем ЧПУ значительно расширяется (например, мод. ИР500МФ4, ИР320ПМФ4; 2206ПМФ4, 6305Ф4).
По наличию обратной связи все системы ЧПУ делят на две группы: разомкнутые и замкнутые.
Разомкнутые системы ЧПУ строятся на основе силовых или несиловых шаговых двигателей (ШД). В последнем случае ШД применяется обычно в комплекте с гидроусилителем (ГУ). Хотя эти системы являются наиболее простыми, в них из-за отсутствия контроля действительного положения рабочего органа станка, на точность перемещения будут влиять погрешности шагового электродвигателя, гидроусилителя и передаточных механизмов привода подач (зубчатой передачи, пары винт – гайка и др.).
Схема работы ШД с гидроусилителем показана на рис. . При повороте ротора ШД на определенный угол винтовая часть 1 распределителя вывертывается из неподвижной в этот момент гайки 2, перемещая распределитель, например, влево. При этом масло поступает в полость гидродвигателя 3, который через зубчатую передачу 4 вращает ходовой винт 5 привода рабочего органа 6. При повороте ротора гидродвигателя поворачивается гайка 2 (при неподвижной винтовой части распределителя) и возвращает распределитель обратно в первоначальное положение до момента перекрытия в нем щелей. Последнее произойдет при повороте ротора гидродвигателя точно на такой же угол, на который повернулся распределитель от ШД.
П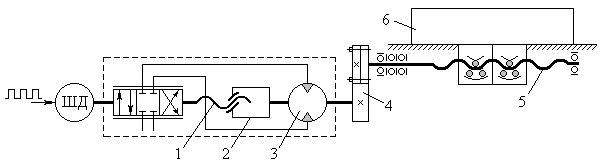 ри
повороте ротора ШД в другую сторону
распределитель перемещается уже вправо
и открывает каналы для прохода масла
под давлением в другую полость
гидродвигателя, вращая его в другую
сторону.
ри
повороте ротора ШД в другую сторону
распределитель перемещается уже вправо
и открывает каналы для прохода масла
под давлением в другую полость
гидродвигателя, вращая его в другую
сторону.
Рис. 22 . Разомкнутая схема управления привода подач станка с ЧПУ
Системами ЧПУ разомкнутого типа оснащена значительная часть станков с ЧПУ (например, мод. 16К20Ф3, 6Р13Ф3, 6Р11Ф3, РТ-725Ф3, 1Б732Ф3).
В основе работы замкнутых систем ЧПУ лежит принцип следящих систем управления. В качестве приводного двигателя М в этих системах чаще всего используют электродвигатели постоянного тока.
Замкнутые системы ЧПУ могут быть: 1) с обратной связью по положению рабочих органов станка; 2) с обратной связью по положению рабочих органов станка и с компенсацией погрешностей станка; 3) самоприспособляющиеся (адаптивные).
Замкнутые системы ЧПУ первой подгруппы могут быть трех типов. В замкнутых системах ЧПУ первого типа (рис. 23,а) производится косвенное измерение положения рабочего органа с помощью кругового ДОС, установленного на ходовом винте. Данная схема достаточно проста и удобна с точки зрения установки ДОС. Габаритные размеры применяемого датчика не зависят от величины измеряемого перемещения. При применении круговых ДОС, устанавливаемых на ходовом винте, высокие требования предъявляются к точностным характеристикам передачи винт-гайка (точность изготовления, жесткость, отсутствие зазоров), которая в этом случае не охватывается обратной связью.
Применение в приводах подач станков с ЧПУ точно изготовленных шариковых винтовых пар и создание в них предварительного натяга для устранения зазоров и увеличения жесткости позволяют широко применять замкнутые системы ЧПУ первого типа для получения высокой точности перемещений рабочих органов.
В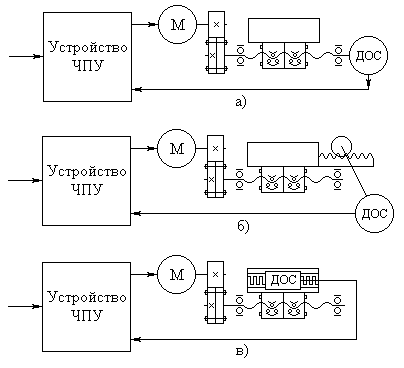 замкнутых системах ЧПУ второго типа
также используют круговой ДОС, но
измеряющий перемещение рабочего органа
станка (рис. 23,б) через реечную передачу.
Хотя в данном случае система обратной
связи охватывает все передаточные
механизмы привода подачи, включая и
передачу винт-гайка, в измерения вносится
погрешность реечной передачи. Поэтому
необходимо применять прецизионную
реечную передачу с рейкой, длина которой
зависит от величины хода рабочего органа
станка. Это усложняет и удорожает систему
обратной связи.
замкнутых системах ЧПУ второго типа
также используют круговой ДОС, но
измеряющий перемещение рабочего органа
станка (рис. 23,б) через реечную передачу.
Хотя в данном случае система обратной
связи охватывает все передаточные
механизмы привода подачи, включая и
передачу винт-гайка, в измерения вносится
погрешность реечной передачи. Поэтому
необходимо применять прецизионную
реечную передачу с рейкой, длина которой
зависит от величины хода рабочего органа
станка. Это усложняет и удорожает систему
обратной связи.
Рис. 23 . Структурные схемы замкнутых систем ЧПУ:
а – замкнутая с круговым ДОС на ходовом винте;
б – замкнутая с круговым ДОС и реечной передачей;
в – замкнутая с линейным ДОС
Замкнутые системы ЧПУ третьего типа оснащены линейными ДОС (рис. 23,в), обеспечивающими непосредственное измерение перемещения рабочего органа станка. Это позволяет охватить обратной связью все передаточные механизмы привода подачи, что обеспечивает высокую точность перемещений. Однако линейные ДОС сложнее и дороже, чем круговые; их габаритные размеры зависят от длины хода рабочего органа станка. На точность работы линейных ДОС могут влиять погрешности станка (например, износ направляющих, тепловые деформации и др.).
Во всех трех типах рассмотренных замкнутых систем ЧПУ учитываются только погрешности привода подачи рабочих органов станка и не учитывают погрешности как самого станка (отклонение от прямолинейности направляющих и их износ, вибрации, тепловые деформации базовых деталей), так и других элементов технологической системы (упругие деформации, износ инструмента и др.), влияющие на точность обработки деталей.
Замкнутые системы ЧПУ второй подгруппы (рис. 24 ) для повышения точности обработки оснащены дополнительными системами обратной связи, с датчиками Д, компенсирующими погрешности станка (тепловые деформации, вибрации, износ направляющих и др.).
Р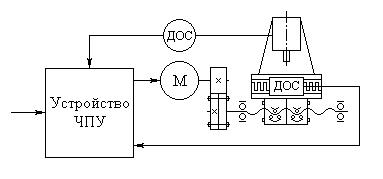 ис.
24 . Структурная схема системы ЧПУ с
компенсацией погрешностей станка
ис.
24 . Структурная схема системы ЧПУ с
компенсацией погрешностей станка
Замкнутые системы ЧПУ третьей подгруппы получили название самоприспособляющихся (адаптивных) систем управления. Благодаря наличию обратных связей не только по положению рабочих органов, но и по параметрам процесса обработки (упругие деформации технологической системы, износ инструмента, температура в зоне резания, вибрации), они обеспечивают автоматическое приспособление режима обработки станка к изменяющимся условиям обработки (колебание припуска на заготовке, ее твердости и др.) для получения заданной точности обработки, максимально возможной производительности или минимальной себестоимости обработки.
Несмотря на относительно малый срок применения систем ЧПУ, они в своем развитии уже прошли несколько этапов, определяемых уровнем развития электронной техники. При этом разработчики систем ЧПУ использовали различные элементные базы: релейно-контакторную, транзисторную, микросхемы малой и средней степени интеграции, мини-ЭВМ и, наконец, микропроцессорные наборы и большие интегральные схемы памяти (БИС-памяти).
Р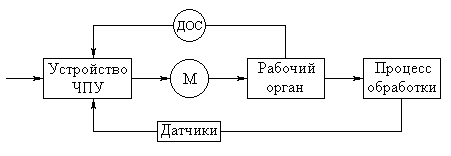 ис.
25. Структурная схема самоприспособляющейся
системы ЧПУ
ис.
25. Структурная схема самоприспособляющейся
системы ЧПУ