

4.7. Реализация оптимального регулятора.
Реализация оптимального закона управления (4.29) затрудняется наличием функциональных составляющих в его структуре. С целью упрощения реализации полученного закона найдем его изображение по Лапласу от всех составляющих
 (4.33)
(4.33)
где L[] - символ преобразования по Лапласу. Для нахождения изображений по Лапласу функциональных составляющих воспользуемся формулой свертки, согласно которой свертыванию оригиналов во временной области соответствует произведение их изображений
![]() ,
(4.34)
,
(4.34)
Здесь знак
![]() -
означает операцию свертывания
оригиналов.
В раскрытом виде формула
свертки (4.34) записывается в виде
-
означает операцию свертывания
оригиналов.
В раскрытом виде формула
свертки (4.34) записывается в виде
 .
(4.35)
.
(4.35)
Сравнивая первый интеграл в выражении для оптимального закона управления (4.33) с интегралом в выражении (4.35) получим
![]() и
и
![]() .
(4.36)
.
(4.36)
Однако, в интеграле свертки и интегралах для функциональных составляющих закона (4.29) не совпадают верхние пределы интегрирования, поэтому прямо воспользоваться формулой свертки нельзя. Очевидно, что интеграл свертки необходимо привести к виду, обеспечивающему равенство
![]() .
(4.37)
.
(4.37)
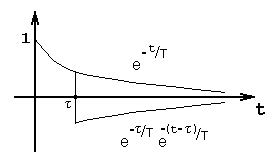 Рис.
4.3.
Рис.
4.3.
Это можно достичь,
если одну из функций в исходном интеграле
искусственно сделать нулевой на интервале
времени t>
,
т.е.
![]() при
r>
, что иллюстрируется рис.4.3. Функция,
существующая на интервале и равная нулю
вне этого интервала
при
r>
, что иллюстрируется рис.4.3. Функция,
существующая на интервале и равная нулю
вне этого интервала
![]() в
соответствии с рис.4.3, имеет вид:
в
соответствии с рис.4.3, имеет вид:
![]() .
Тогда L - изображений от первой
функциональной составляющей можно
записать в виде
.
Тогда L - изображений от первой
функциональной составляющей можно
записать в виде

 .
.
Учитывая, что
 и
и
 ,
получим:
,
получим:
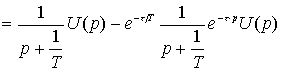 .
(4.38)
.
(4.38)
Аналогично найдем L-изображение для второй функциональной составляющей в выражении для оптимального закона управления
 .
(4.39)
.
(4.39)
Исходя из полученных результатов, оптимальный закон управления примет вид(4.40). Знание операторной формы записи оптимального закона позволяет разработать структурную схему оптимального астатического регулятора для объекта первого порядка с запаздыванием (Рис.4.4).
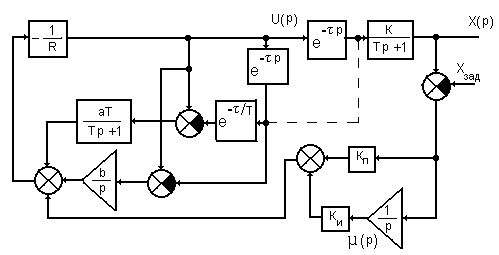
Рис.4.4. Структурная схема оптимальной системы управления.
Связь, обозначенная
пунктиром, соответствует точному,
теоретическому алгоритму управления
(4.40). Однако на практике в объекте
управления трудно выделить этот сигнал,
поэтому его моделируют в регуляторе с
помощью звена с чистым запаздыванием.
Как видно из структурной схемы, оптимальный
регулятор для объекта первого порядка
с запаздыванием состоит из типового
ПИ-регулятора и корректирующего
устройства, в структуре которого
содержится модель объекта управления.
Данный регулятор особенно эффективен
для управления объектами, в которых
отношение
![]() /Т>0,5.
На рис.4.5 приведены графики отработки
единичного возмущающего воздействия
в оптимальной системе управления
объектом первого порядка.
/Т>0,5.
На рис.4.5 приведены графики отработки
единичного возмущающего воздействия
в оптимальной системе управления
объектом первого порядка.
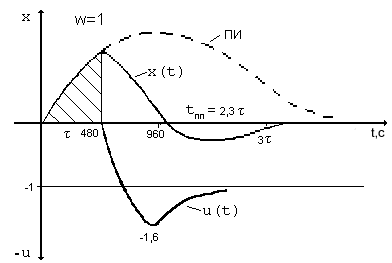 Рис.
4.5. Переходный процесс в системе с
оптимальным регулятором.
Рис.
4.5. Переходный процесс в системе с
оптимальным регулятором.
Параметры объекта
управления были равны
![]() ;
T=612сек;
=480
сек. При этом коэффициенты закона (4.40)
имели следующие значения
;
T=612сек;
=480
сек. При этом коэффициенты закона (4.40)
имели следующие значения
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
при R=1,
,
при R=1,
![]() .
По аналогичной методике может быть
получена структура оптимального
регулятора для объекта второго порядка
с запаздыванием. В этом случае оптимальный
регулятор состоит из типового
ПИД-регулятора и корректирующего
устройства, в структуре которого
содержится два инерционных звена и одно
интегрирующее.
.
По аналогичной методике может быть
получена структура оптимального
регулятора для объекта второго порядка
с запаздыванием. В этом случае оптимальный
регулятор состоит из типового
ПИД-регулятора и корректирующего
устройства, в структуре которого
содержится два инерционных звена и одно
интегрирующее.