

Общий подход к разработке управляющих систем
Разработку управляющих систем начинают с выбора параметров, участвующих в управлении. К ним относятся:
контролируемые, сигнализируемые и регулируемые величины;
параметры защиты и блокировки;
параметры, с изменением которых будут вноситься регулирующие воздействия.
Затем выбирают конкретные автоматические устройства управляющей системы:
приемные устройства;
первичные и вторичные приборы;
регулирующие устройства.
Проектируемая управляющая система должна:
Обеспечивать достижение цели управления в любых условиях;
Быть простой и надежной.
Основными автоматическими устройствами, определяющими технологический режим процесса являются регуляторы. Поэтому сначала целесообразно определить регулируемые величины процесса и каналы внесения регулируюших воздействий и только после этого приступать к выбору остальных параметров. При этом существенное значение имеет минимизация количества параметров управления.
Выбор регулируемых, контролируемых и сигнализируемых величин, а также каналов внесения регулирующих воздействий
Для выбора регулируемых величин и каналов внесения регулирующих воздействий обязательно хорошее знание и понимание управляемого технологического процесса.
При этом первоначально:
Определяется целевое назначение управляемого технологического процесса и его взаимосвязь с другими процессами производства.
Выбирается показатель эффективности управляемого процесса.
Задается численное значение показателя эффективности, на котором он должен поддерживаться.
Устанавливаются статические и динамические характеристики объекта управления.
После этого технологический процесс анализируют на предмет наличия тех или иных возмущающих воздействий и возможности их ликвидации до поступления в объект управления. При этом особое внимание следует обратить на стабилизацию входных параметров, поскольку с их изменением в объект управления проникают наиболее сильные внешние возмущения. Эти возмущения очень редко удается ликвидировать до поступления в объект управления. Кроме того, практически невозможно предусмотреть характер и величины внутренних возмущающих воздействий и устранить их.
Поскольку регулировать одновременно все режимные параметры объекта управления, как правило, не удается, то в качестве регулируемой величины обычно принимают показатель эффективности. Регулирующее воздействие вносится изменением одного или нескольких входных параметров.
При выборе регулируемых величин и каналов внесения регулирующих воздействий необходимо обязательно установить статические и динамические характеристики объекта управления.
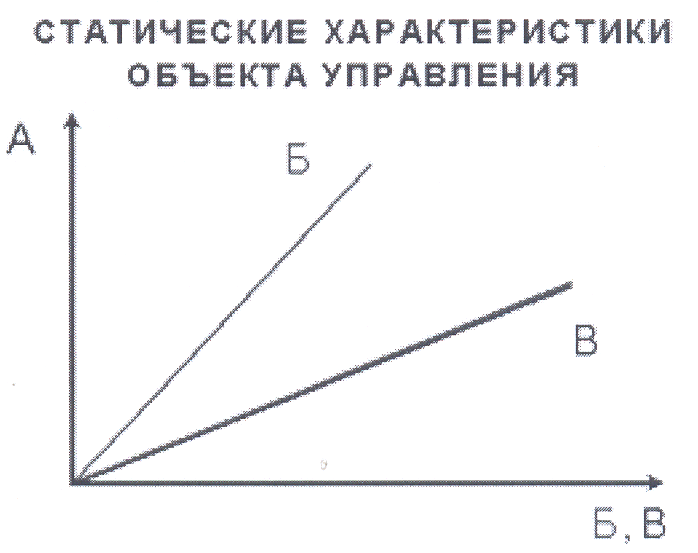
Статические характеристики объекта управления дают возможность оценить степень влияния одних параметров управления на другие.
На графике показаны статические характеристики объекта управления, из которых видно, что изменение по параметру Б оказывает более сильное влияние на параметр А, чем изменение параметра В. Поэтому параметр Б более целесообразен для внесения регулирующих воздействий.
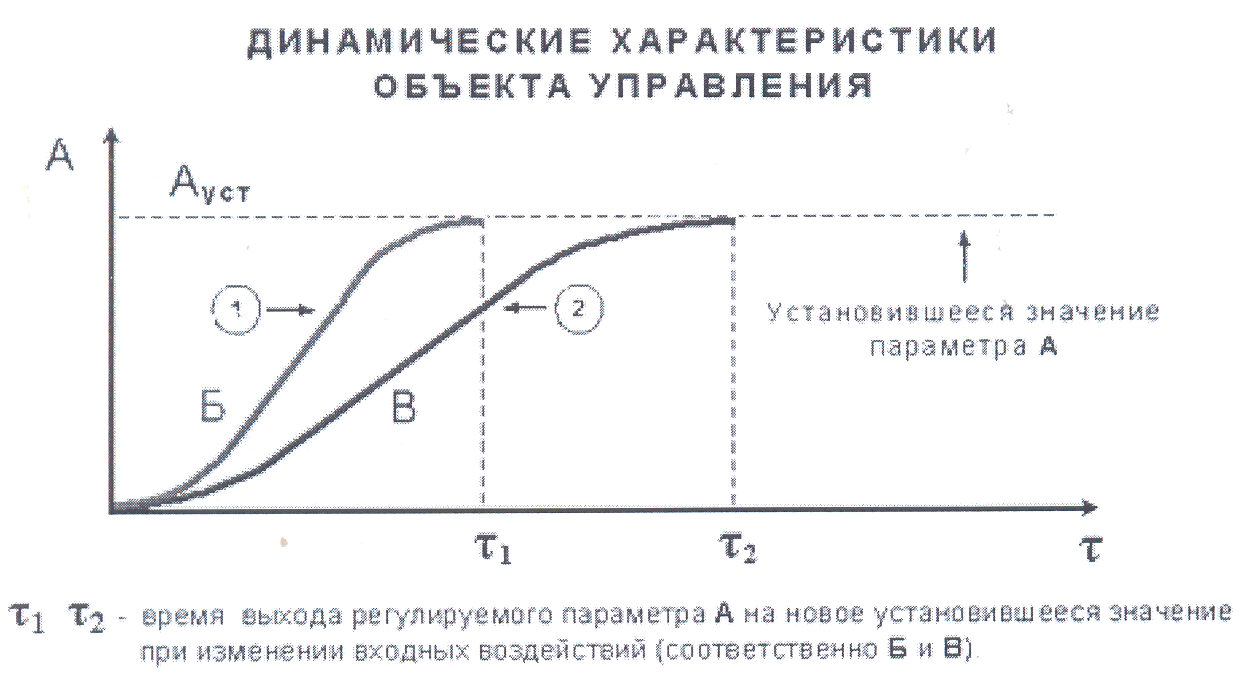
Динамические характеристики объекта управления способствуют выбору каналов, по которым регулирующие воздействия вносятся наиболее эффективно.
На графике показаны динамические характеристики объекта управления. Из них видно, что наименьшее запаздывание имеет место при изменении параметра Б (кривая 1), так как быстрее достигается новое установившееся значение регулируемого параметра А, чем при изменении параметра В (кривая 2).
При снятии динамических характеристик 1 и 2 величины возмущений по каналам параметров Б и В подобраны таким образом, чтобы величина нового установившегося значения параметра А в обоих случаях была одинаковой.
При управлении сложными взаимосвязанными технологическими аппаратами применяют следующие способы устранения или ослабления внутренних связей между отдельными параметрами:
Выбор в качестве регулируемых величин не связанных (или слабо связанных) между собой параметров.
Введение в цепь регулирования компенсирующих внешних связей между регуляторами (автономное регулирование).
При выборе контролируемых величин исходят из того, что контролю подлежат те параметры, знание текущих значений которых облегчает пуск, наладку и ведение технологического процесса.
К таким параметрам, в частности, относятся нерегулируемые режимные параметры и входные параметры, при изменении которых в объект управления будут проникать возмущающие воздействия. Для осуществления оперативного управления возникает необходимость контролировать наиболее важные выходные параметры процесса (например, количество получаемого продукта, его температуру, давление и т. д.), а также количество потребляемой электроэнергии, тепло- и хладоносителей.
К выбору сигнализируемых величин приступают после определения взрыво- и пожароопасности объекта управления и степени токсичности и агрессивности перерабатываемых веществ.
Сигнализации подлежат те параметры, изменение которых может привести к аварии или серьезному нарушению технологического режима. Если же к отклонению регулируемых величин предъявляются жесткие требования, то они должны одновременно быть и сигнализируемыми. В многоконтурных системах управления требуется обязательно сигнализировать остановку оборудования, не предусмотренную технологическим регламентом.