

Определение передаточных функций разомкнутой и замкнутой систем, по задающему и возмущающему воздействиям
Передаточная функция первого звена:

Передаточная функция второго звена:W2=![]()
Передаточная функция разомкнутой системы
WP=W1*W2=
![]()
Передаточная функция замкнутой системы:
![]()
![]()
Передаточная функция замкнутой системы по задающему воздействию:
ε(t)=y(t)-x(t)
x(t)=y(t)*W1*W2 => y(t)=x(t)/(W1*W2);
ε(t)=x(t)*(1/(W1*W2*W3)-1)=x(t)*(1-WP)/WP;
![]()
![]()
![]()
Передаточная функция замкнутой системы по возмущающему воздействию:
ε(t)=f(t)-x(t)*W1;
x(t)=f(t)*W2=>f(t)=x(t)/W2;
ε(t)=x(t)*(1/W3-W1*W2);
WP=W2
Ф(p)=![]()
Фεg=0=
![]()
 Построение
модели
исследуемой
САУ,
используя
Matlab(Simulink)
Построение
модели
исследуемой
САУ,
используя
Matlab(Simulink)
Строим в Simulinkмодель исследуемой САУ:
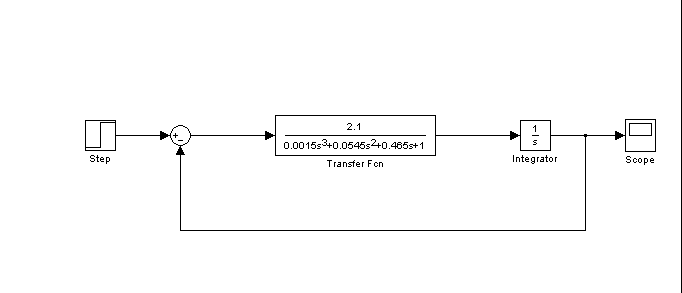
Рисунок 1. Модель нескорректированной исследуемой САУ
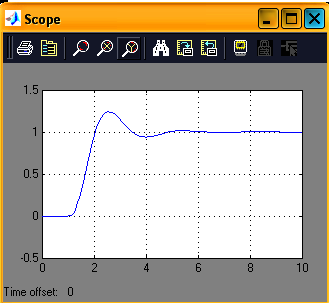
Рисунок 2. Переходная характеристика нескорректированной исследуемой САУ
Из рисунка 2 видно, что исследуемая САУ устойчива.Определим показатели качества.
![]()
где
![]() -максимальное
значение переходной характеристики
замкнутой САУ
-максимальное
значение переходной характеристики
замкнутой САУ![]() ;
;
![]() - установившееся значение
- установившееся значение![]() .
.
σ=(1.3-1)/1*100=30%
Время регулирования tрег- минимальная величина, при которой удовлетворяется условие:
![]()
где
![]() - заданная величина ошибки (обычно
- заданная величина ошибки (обычно![]() =0,05
=0,05![]() ).
).
 h(t)
h(t)


 2δ
2δ






 hуст
hуст
hmax

 t
t
 tрег
tрег
Рисунок 3
![]() =0,05
=0,05![]() =0.05
=0.05
![]()
tрег=4,5с.
Показатели качества, время регулирования
tрегне удовлетворяет
заданным в условии![]() =1.5с
=1.5с
Оценка устойчивость замкнутой нескорректированной системы регулирования по критерию Гурвица.
Этот критерий позволяет сказать, где
находятся корни характеристического
уравнения, не решая его. Их коэффициентов
характеристического уравнения
![]() ,
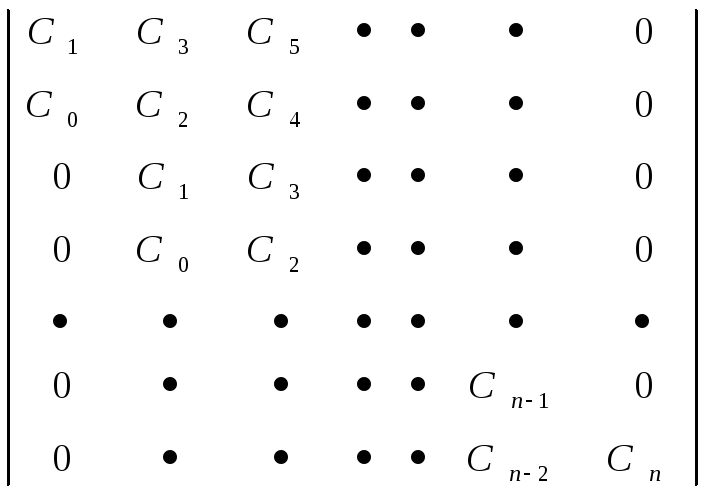
составляют сначала главный определитель
Гурвица следующим образом:
,
составляют сначала главный определитель
Гурвица следующим образом:
Характеристическое уравнение для моей САУ имеет следующий вид:
0,0015s4+0.0545s3+0.465s2+s+2.1=0
Для устойчивости системы необходимо и достаточно чтобы все диагональные миноры данного определителя были >0.
Составим определитель Гурвица.
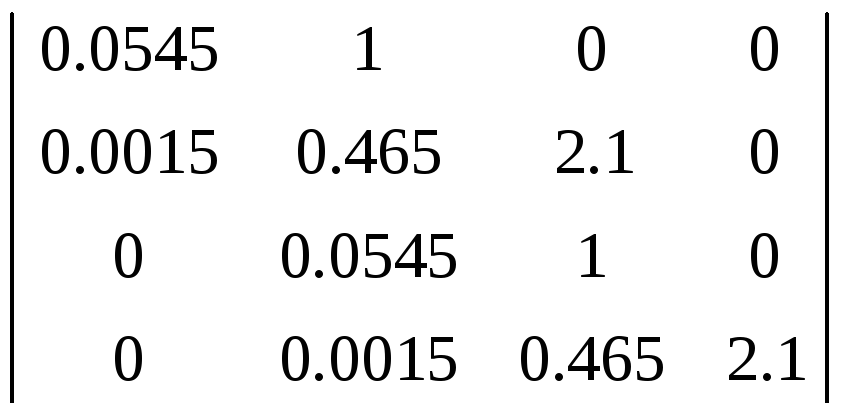
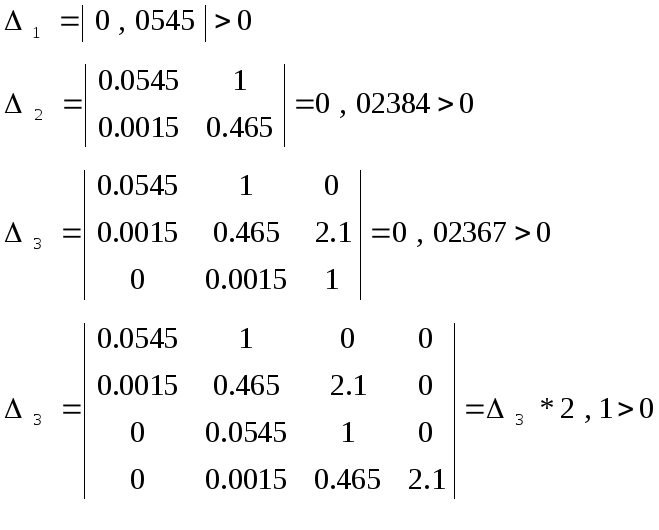
САУ по критерию Гурвица -устойчива, так как все диагональные миноры положительны.
Оценка устойчивость замкнутой системы по критерию Михайлова.
 Характеристическое
уравнение замкнутой системы
Характеристическое
уравнение замкнутой системы
![]()
Составим характеристическое уравнение передаточной функции замкнутой САУ.
D(s)=0.0015s4+0.0545s3+0.465s2+s+2.1
САУ устойчива, если при изменении частоты w от 0 до +∞,начав движение из точки , лежащей на положительной вещественной полуоси, вращаясь против часовой стрелки и нигде не обращаясь в нуль , прошел последовательно n квадрантов, повернувшись угол n*(π/2), где n – степень характеристического уравнения.
В системе Matlabпостроим годограф Михайлова.
Текст программы
num=[0.0015 0.0545 0.465 1 2.1];
den=[1];
w=0.0001:0.01:10;
apk=freqs(num,den,w);
u=real(apk);
v=imag(apk);
plot(u,v);grid

Рисунок 4.Годограф Мехайлова
Видно , что система устойчива ,так как при изменении частотыwот 0 до +∞,начав движение из точки , лежащей на положительной вещественной полуоси, вращаясь против часовой стрелки и нигде не обращаясь в нуль , прошел последовательно n квадрантов, повернувшись угол4*(π/2).