

Курсовая работа по ТАУ3
.docМинистерство общего и профессионального образования Российской Федерации.
Пермский государственный технический университет.
Чайковский филиал.
Кафедра И.Д.
КУРСОВАЯ РАБОТА
по ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
тема: Синтез и анализ систем автоматического управления.
Вариант №7
Выполнила:.
Проверил: .
Чайковский 2003 г.
Содержание.
1. Проверить на устойчивость ОУ методом Гурвица 3
2. Схема переменных состояний 4
3. Моделирование ОУ и определение основных показателей качества:
время переходного процесса и перерегулирование. 4
4. Проверка ОУ на управляемость и наблюдаемость. 4
5. Синтез цифрового САУ методом переменного коэффициента усиления. 5
6. Моделирование САУ (Matlab), в качестве переходного процесса рассмотреть
переходный процесс переменной x1 и управляющего цифрового сигнала m 7
7. Определение основных показателей качества ЦСАУ: время переходного
процесса и перерегулирования. 8
8. Синтез САУ методом структурно- параметрической оптимизации. 8
9. Моделирование САУ (Matlab). 9
10.Определение показателей качества управления САУ (аналогового САУ). 10
11. Вывод. 10
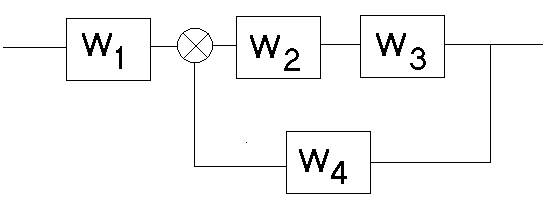
Исходная схема объекта управления.
![]()
![]()
![]()
К1 = К3 = 2; К2 = К4 = 1; Т1 = 0,5; T4=0,8.
1.Проверка объекта управления на устойчивость методом Гурвица.
![]()

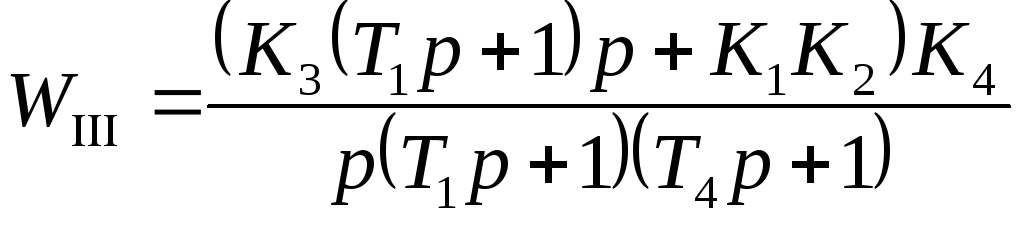
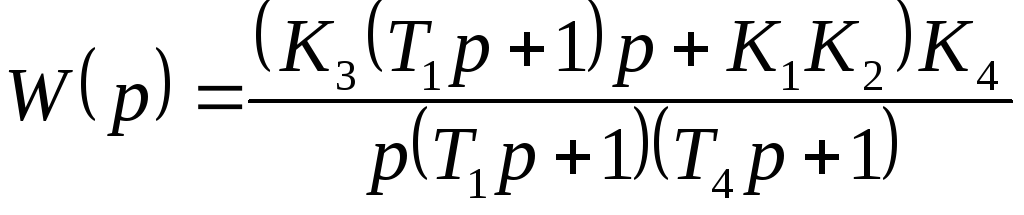
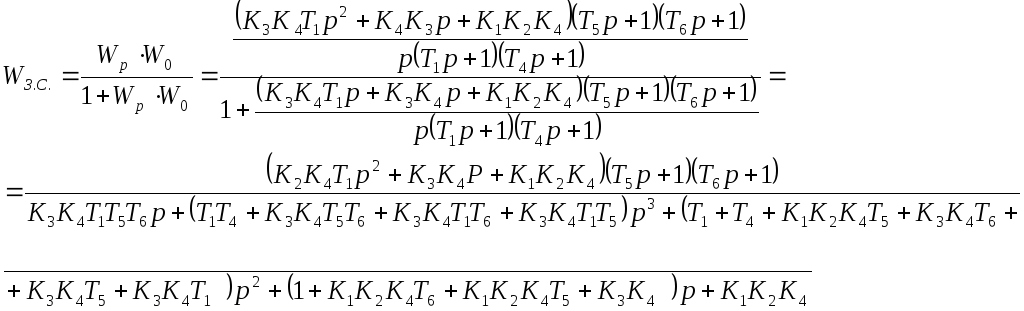
Передаточная функция разомкнутой системы:
Передаточная функция замкнутой системы:

Характеристическое уравнение:
![]()
По характеристическому уравнению составим матрицу:
Определим определители Гурвица:
![]()
![]()
![]()
Т.к.
![]() система устойчивая
система устойчивая
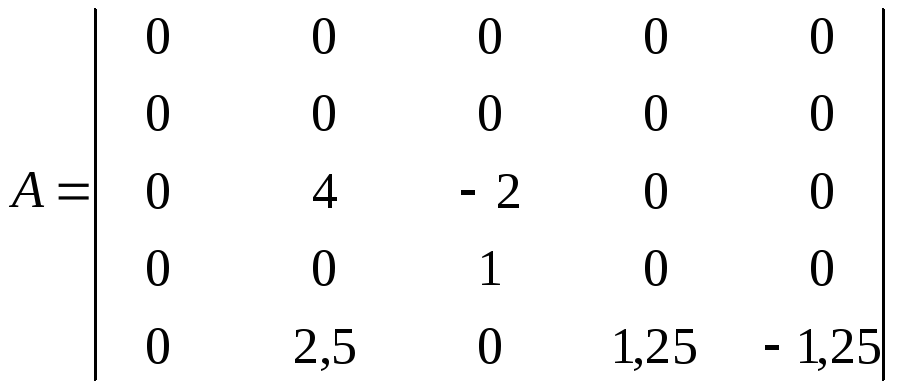
2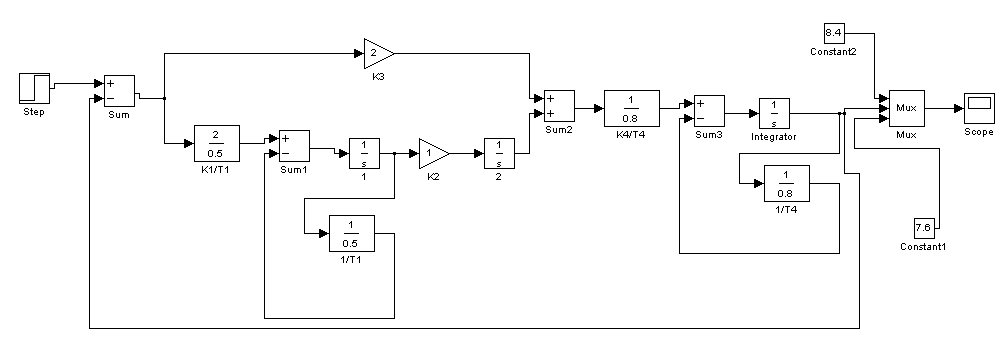 .Схема
переменных состояний.
.Схема
переменных состояний.
Моделирование объекта управления.
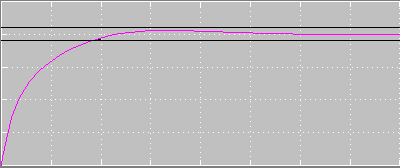
tnn = 5,9c ;
![]()
![]()
Проверяем объект на управляемость и наблюдаемость.
Дифференциальное уравнение:
Проверка объекта управления на управляемость.
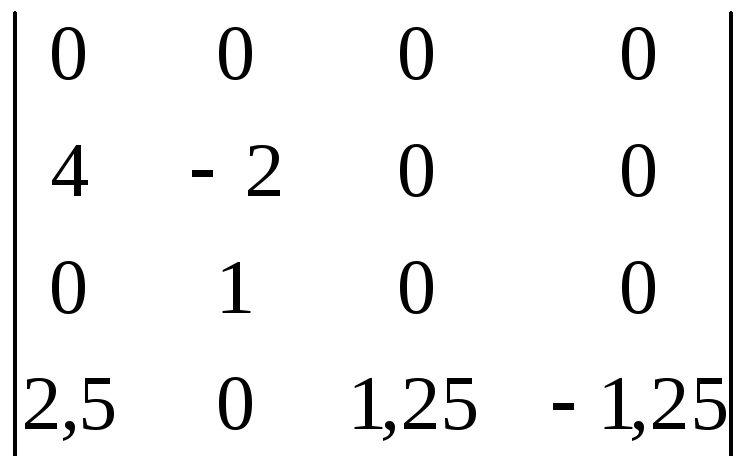
Для управляемости объекта управления необходимо и достаточно чтобы матрица Н вида [B AB A2B … An-1 B] имела rang = n , где:
Матрица коэффициентов при Х=
матрица коэффициентов входных сигналов
r=
![]() ;
;
При n=4 det(Н)=32,
где Н=![]() ;
;
Из расчетов наглядно видно, что определитель матрицы Н > 0 и имеет 4-ый порядок, следовательно, матрица Н имеет rang = 4 т.е. объект управления управляем.
Проверка объекта управления на наблюдаемость.
Для наблюдаемости объекта управления
необходимо и достаточно чтобы матрица
M вида [С AТСТ
(AТ)2СТ
… (AТ)n-1
СТ] имела rang = n
, где матрица коэффициентов выходных
сигналов С=![]() ;
;
при n=4 det(М)=87,
где М=![]() ;
;
Из расчетов видно, что определитель матрицы M > 0 и имеет 4-ый порядок, следовательно матрица M имеет rang = 4 т.е. объект управления наблюдаем.
Синтез САУ методом переменного коэффициента усиления.
Система дифферинцальных уравнений:
T0 = 0,5

Составляем систему уравнений 3-го порядка относительно mi для каждого момента Т вида: P·m3 + F·P·m2 + F2·P·m1 + F3·x (0) = xж. Т.к. х(0) → 0, то уравнение можно переписать в виде: P·m3 + F·P·m2 + F2·P·m1 = xж.
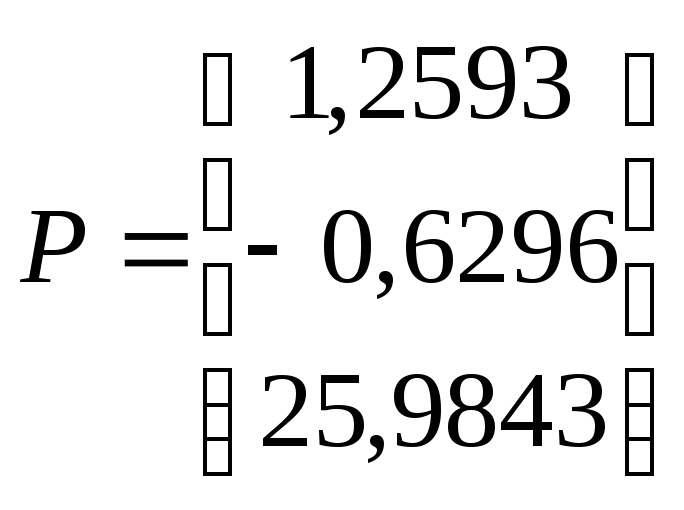


![]() уравнение имеет
вид:
уравнение имеет
вид:
1,2593m3 + 0,4664m2 + 0,1727m1 = X3Ж = 0
-0,6296m3 – 0,2332m2 + 0,0864m1 = X2Ж = 1
25,9843m3 + 13,9614m2 + 7,4365m1 = X1Ж = 1
X4 = m4Ж = 0
m1 = 5.7885
m2 = -4.9379
m3 = 1.0349
m4 = 0
e1=r-X (0) = 1- 0 =1
e2=r-Pm1-FX (0) = 1- 0.04*24.405=0.318
e3=r- Pm2- (FP) m1- (F2) X (0) = 1- 3.1089+ 0.0894 =-0.759
e4=r- Pm3- (FP) m2- (F2 P) m1 -(F3) X (0) = 1+ 0.6516 – 1.1515 – 0.0894 =0.4107
По проведённым вычислениям получаем передаточную функцию цифрового регулятора:


Моделирование объекта управления вместе с регулятором.
Моделирование САУ производилось на ЭВМ с использованием программы "Matlab" и её управляющего модуля Simulink.
tnn = 5,9c
;
![]()
![]()
Синтез САУ методом структурно-параметрической оптимизации.
Выбираем Wp следующего вида:
Wp = (T5p+1) (T6p+1)

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

T5=2,7c.
T6=1,66c.
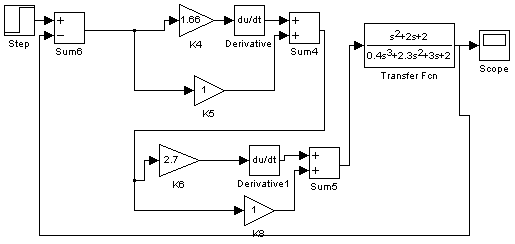
Моделирование объекта управления.
Моделирование САУ производилось на ЭВМ с использованием программы "Matlab" и её управляющего модуля Simulink.
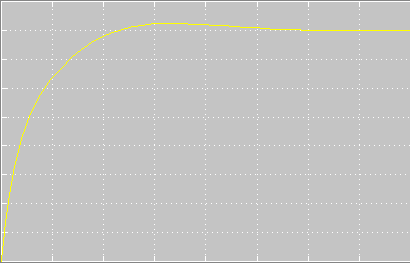
tnn = 5,8c
;
![]()
![]()
Сравнительный анализ качества управления двумя методами.
Используя цифровой регулятор, построенный методом переменных коэффициентов время переходного процесса составляет tпп ≈ 5,9 сек. при установлении значения выходного сигнала в пределах 5% ( ℮ = 0,05 ) от требуемого.
Перерегулирование: σ % = 3.
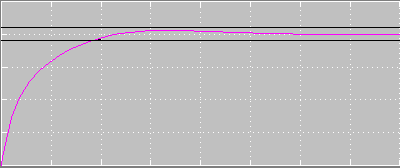
Смоделировав САУ методом структурно-параметрической оптимизации на ЭВМ с использованием программы "Matlab" и её управляющего модуля Simulink, убедилась, что система устойчива и получил график переходного процесса. Из полученного графика можно определить параметры качества системы.
Время переходного процесса tпп ≈ 5,8 сек. при установлении значения выходного сигнала в пределах 5 % ( ℮ = 0,05 ) от требуемого.
Перерегулирование:
σ
% =
![]() < [σ
%] = 11
%,
< [σ
%] = 11
%,
где ymax = 8,25 – максимальное значение выходного сигнала.