

2. Элементы ориентирования стереопар
В наземной фотограмметрии положение любой точки местности может быть определено в пространственной прямоугольной системе координат. Для удобства обработки стереопар используют две системы координат: фотограмметрическую (правую) и геодезическую (левую).
Систему геодезических координат О,Х,Y,Z — левую, используют для определения геодезических координат измеряемых точек местности (рис. 5, а).
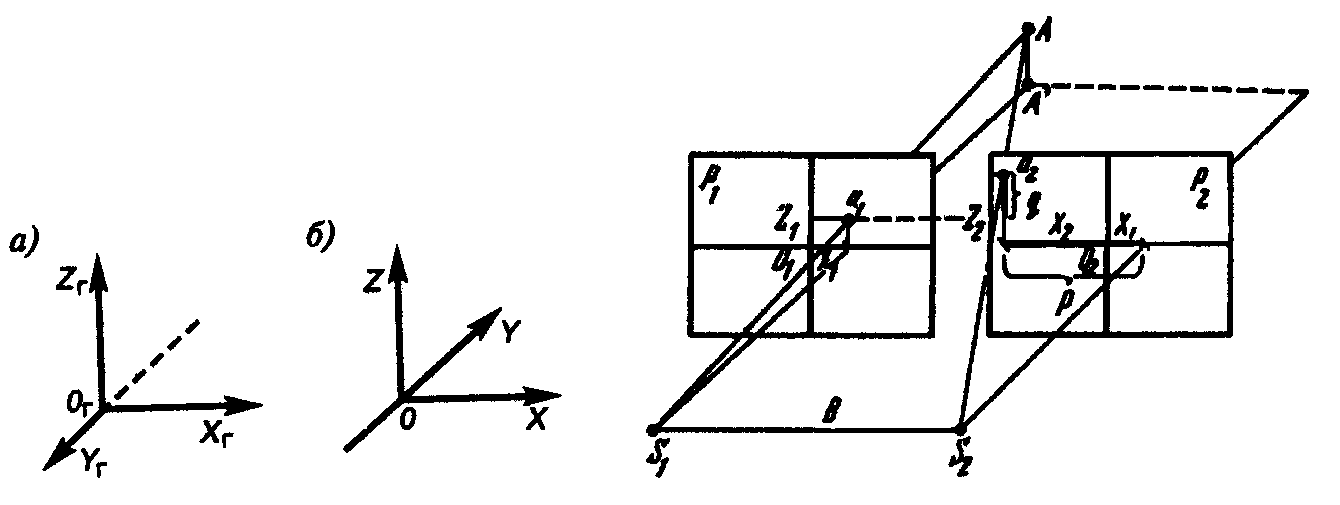
Рис. 5. Системы координат снимков стереопары: Рис. 6. Продольный и поперечный параллаксы точки А
а-геодезическая; б-фотограмметрическая
Систему координат О,Х,Y,Z — правую, используемую для определения взаимного положения точек местности, называют фотограмметрической (рис. 5, б).
Кроме того, для определения положения точек на снимке используют плоскую систему прямоугольных координат о,х,z (см. рис. 4). Начало этой системы находится на пересечении прямых, проходящих через координатные метки, т. е. совпадают с главной точкой снимка.
Если х1 z1 и х2 z2 — координаты соответствующих точек а1 и а2 на стереопаре P1 — Р2 (рис.6), то разность абсцисс соответствующих точек называют продольным параллаксом р, а разность аппликат — поперечным параллаксом q:
р = х1 — х2,
q = z1 — z2. (1)
Восстановление положения снимков в момент фотографирования осуществляют по элементам его ориентирования. Различают элементы внутреннего и внешнего ориентирования.
Положение снимка относительно центра проекций S (рис. 7, а) определяется элементами внутреннего ориентирования, к которым относятся фотограмметрические координаты главной точки снимка х0, z0 и фокусное расстояние камеры fк.

Рис. 7. Элементы ориентирования снимка: Рис. 8. Углы скоса и конвергенции
а-внутреннего; б-внешнего
Следует иметь в виду, что при юстировке прибора добиваются, чтобы начало фотограмметрических координат совпадало с главной точкой снимка, т. е. чтобы основание перпендикуляра, опущенного из центра проекций (центра объектива камеры) S на фокальную плоскость, точно совпадало с точкой пересечения прямых, соединяющих противоположные метки прикладной рамки фототеодолита, при этом оказывается, что хо = zo = 0. Элементы внутреннего ориентирования позволяют восстановить по снимку положение связки лучей, существовавшую в момент фотографирования.
Положение связки проектирующих лучей относительно геодезической системы координат определяется элементами внешнего ориентирования, к которым относят (рис. 7, б):
ХS, YS, ZS — координаты центра проекций S в геодезической системе координат;
α — дирекционный угол главного луча S0;
ω — угол наклона главного луча к горизонту;
χ — угол поворота снимка, т. е. угол между осью ОХ и горизонтальной плоскостью.
В практике наземной фотограмметрии элементы внешнего ориентирования представляют в виде, исключающем необходимость определения координат правой точки базиса фотографирования, тогда:
ХS1, YS1, ZS1 — геодезические координаты левой точки базиса фотографирования;
ω 1 — угол наклона главного луча левого снимка;
χ1 — угол поворота левого снимка;
φ1 — угол скоса (рис. 8) левого снимка (при отклонении луча влево от перпендикуляра к базису угол скоса принимают положительным, при отклонении вправо — отрицательным);
α h— дирекционный угол базиса (с его левой точки на правую);
B — горизонтальная проекция базиса фотографирования;
hb — превышение между правой и левой точками базиса;
χ2 — угол поворота правого снимка;
ω 2 — угол наклона главного луча правого снимка;
γ — угол между проекциями главных лучей левого и правого снимка (см. рис. 8), при этом
γ = φ2 - φ1 (2)
При положительном значении γ, когда лучи сходятся, угол называют углом конвергенции.
Все элементы внешнего ориентирования, как правило, определяют геодезическими методами и при обработке стереопар считаются известными.