

1.Указатели электрических дистанционных манометров
В зависимости от типа выбранной электроизмерительной схемы указатель дистанционного манометра может представлять собой гальванометр, логометр или следящий электропривод. Поскольку на летательных аппаратах преимущественное применение нашли логометрические дистанционные манометры, ограничимся рассмотрением схем и конструкций указателей логометрического типа. На рис.20, и показан указатель электрического дистанционного манометра, содержащий магнитоэлектрический логометр и электрические сопротивленияR1, R2,Rз’, R3’иRд,входящие в схему рис. 17, б.
Конструктивная схема магнитоэлектрического логометра показана на рис.20, б. Логометр имеет две неподвижные прямоугольные проволочные рамки 3 и 10, расположенные под углом 120° и охватывающие медный корпус успокоителя 1, внутри которого помещена подвижная система, состоящая из постоянного магнита 2, связанного с указывающей стрелкой 5. Ось 9 подвижной системы имеет с обоих концов керны 11, опирающиеся наподпятники 6. Рамки помещены внутрь цилиндрического пермаллоевого экрана 8, защищающего подвижную систему от внешних магнитных полей.
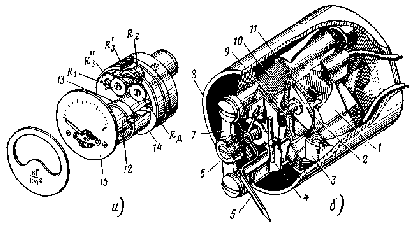
Рис.20. Конструкция указателя электрического дистанционного манометра с магнитоэлектрическим логометром:
ауказатель; блогометр; 1медный корпус магнитного успокоителя; 2подвижный магнит; 3внутренняя рамка; 4неподвижный постоянный магнит; 5стрелка; 6корундовые подпятники; 7мостик; 8экран из пермаллоя; 9ось подвижной системы; 10внешняя рамка; 11керн оси подвижной системы; 12логометр; 13хомут; 14основание; 15шкала;R1, R2, R’3, R’’3 иRД катушки сопротивления
Рамки логометра при протекании по ним токов i1 и i2 создают два направленных под углом 120° магнитных поля, замыкающихся через экран. Для приведения стрелки на нуль при отключении питания в логометре имеется неподвижный постоянный магнит 4, создающий слабое магнитное поле напряженностью H.
Длина подвижного магнита значительно меньше диаметра экрана. Поэтому в рабочей зоне, где поле взаимодействует с подвижным магнитом, магнитные поля каждой из рамок можноохарактеризовать векторами напряженности Н1 и H2, направленными по осям АА' и ВВ' под углом 120° по отношению друг к другу (рис.21).
Величина векторов напряженности
H1=i1 ; H2=i2 ,
где число витков каждой из рамок.
Напряженность результирующего магнитного поля в рабочей зоне определяется геометрической суммой векторов
![]() .
.
Подвижный
магнит вместе с указывающей стрелкой
располагается
по направлению вектора
![]() (если не учитывать
влияние H).
(если не учитывать
влияние H).
Если принять за начало отсчета ( = 0) напряжение, совпадающее с осью вектора Н1, то текущий угол отклонения стрелки определится из уравнения
![]() ,
,
где угол между рамками (=120).
Заменяя
![]() ,
находим
,
находим
=arctg![]() ,
,
где
![]() .
.
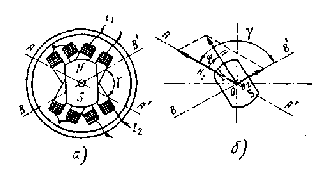
Рис.21. К выводу уравнения магнитоэлектрического логометра с подвижным магнитом:
а сечение логометра, б векторная диаграмма напряженности поля
Уравнение (18) и является характеристикой магнито-электрического логометра с подвижным магнитом, входной величиной которого является , а выходной.
Стрелка расположена посредине шкалы (=60) при равенстве токов в рамках (i1=i2=i3 ).
При этом составляющие
напряженности магнитного поля H1=H2=![]() (D внутренний диаметр экрана ), а результирующая
напряженность
(D внутренний диаметр экрана ), а результирующая
напряженность
![]() .
(19)
.
(19)
Рассматривая систему «подвижный магнит— магнитное поле» как «магнитную пружину», можно представить логометр как динамическое колебательное звено с передаточной функцией
![]() ,
(20)
,
(20)
где Сжугловая жесткость «магнитной пружины», равнаяСЖ=Нmм (Ннапряженность результирующего магнитного поля внутри логометра;mм магнитный момент подвижного магнита);
КДкоэффициент демпфирования;
J момент инерции подвижной системы.
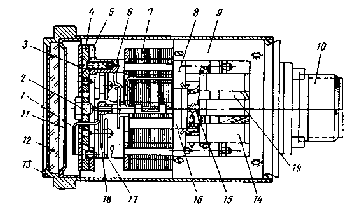
Рис.22. Конструкция указателя с ферродинамическим логометром:
1
стрелка; 2
подпятник; 3
циферблат; 4
подшкальник; 5
магнитодержатель; 6
стойка; 7
магнитопровод; 8
накладка; 9
основание; 10
вилка; 11
окно; 12
стекло; 13
корпус; 14
катушка; 15
ось; 16
катушка возбуждения; 17
магнит; 18
лепесток; 19
термосопротивление![]()
Конструкция указателя с ферродинамическим логометром приведена на рис. 22, а схема магнитопровода этого логометра показана на рис.23.
Подвижная рамка 2 подвержена действию двух механических моментов М1 и М2. Момент М1, который условно назовем вращающим, создается за счет взаимодействия электрического тока i2, протекающего по рамке 2, с магнитным полем, создаваемым в рабочем зазоре током i1 катушки возбуждения 1, Момент М2, являющийся противодействующим, образуется в результате стремления рамки 2 втянуть в себя железный сердечник.
Направление витков рамки 2 выбирается таким образом, чтобы момент М1 был направлен навстречу моменту М2. Тогда положение равновесия подвижной системы логометра будет определяться равенством М1=M2.
Для определения характеристики ферродинамического логометра положим, что токи i1 и i2 синфазны (это условие является необходимым для правильной работы логометра):
i1=I1sin2t;
i2=I2sin2t,
где I1 и I2 амплитудные значения токов;
частота переменного тока.
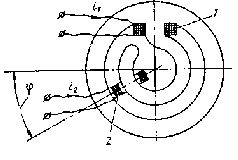
Рис.23. Схема магнитопровода ферродинамического логометра: