

4.Электрические дистанционные манометры.
Электрические дистанционные манометры предназначены для выдачи визуальной информации об измеряемом давлении на некотором расстоянии от места, в котором производится замер. В комплект электрического дистанционного манометра обычно входят датчик и указатель, соединяемые между собой электропроводкой, подключенной к источнику питания.
Схемы электрических дистанционных манометров могут быть трех типов:
а) схемы, в которых выходной параметр датчика R, L или С преобразуется в силу тока i, измеряемую с помощью гальванометра (рис.17, а);
б) схемы, в которых выходной параметр датчика R, L или С преобразуется в два тока i1 и i2; отношение этих токов i1/i2измеряется с помощью логометра (см. рис.17,6 и 18);
в) компенсационные схемы, в которых измерение параметра R, L или С осуществляется с помощью самобалансирующего моста (см. рис. 19).
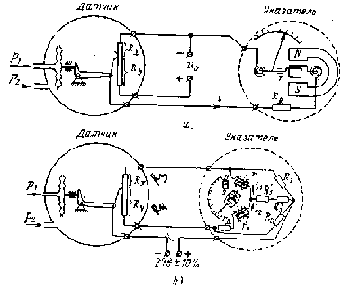
Рис.17. Схемы электрических дистанционных манометров с потенциометрическим датчиком давления:
а с магнитоэлектрическим гальванометром; б с двухрамочным магнитоэлектрическим логометром
Недостатком схемы типа, приведенного на рис.17,а, является зависимость измеряемой гальванометром силы тока i от напряжения uo источника питания, а для схем, питаемых переменным током,— и от частоты f переменного тока.
Например, в схеме, представленной на рис.17,а, сила тока определяется уравнением
![]() ,
,
где RX и RY сопротивление плеч потенциометра;
R добавочное сопротивление;
r сопротивление рамки гальванометра.
Поскольку изменение напряжения бортовых источников питания достигает±10%от номинала, схема, представленная на рис.17, а, с измерением силы токаiне нашла практическогоприменения. Подобные схемы могут применяться при наличии источника питания с высокой точностью стабилизации.
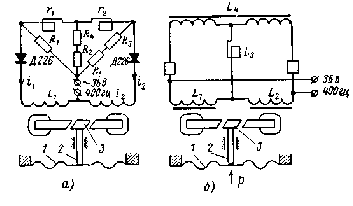
Рис.18. Схемы электрических дистанционных манометров с индуктивным датчиком давления:
а с магнитоэлектрическим логометром; б с ферродинамическим логометром; 1 мембрана; 2 шток; 3 якорь
Влияние изменений напряжения и частоты источника питания на результаты измерения практически исключается в логометрических и компенсационных схемах.
Наибольшее распространение получили логометрические схемы (схемы с измерением отношения токов i1/i2).
На рис.17,6 представлена схема электрического дистанционного манометра с потенциометрическим датчиком давления и двухрамочным магнитоэлектрическим логометром. Схема питается от источника постоянного тока напряжением 27 в. Характеристика схемы определяется уравнением
![]() ,
,
где RX и RY переменные сопротивления вом;
R1, R2 и R3 постоянные сопротивления плеч моста вом;
R3=R3’+R3’’;
r=r1+rд иr1 сопротивления рамок логометра вом;
rд добавочное сопротивление вом.
Конструкция датчика давления, применяемого в схеме (см. рис.17,б),отвечает кинематической схеме, изображенной на рис. 11.
Вариант схемы электрического дистанционного манометра с индуктивным датчиком и магнитоэлектрическим логометром изображен на рис.18, а. Схема питается от источника переменного тока напряжением 36 в частотой 400 гц. Схема на рис.18, а аналогична рассмотренной на рис.17,6 различие состоит лишь в том, что вместо переменных сопротивлений Rx иRy(см. рис.17,6) на входе схемы включены переменныеиндуктивности L1 и L2 (см. рис.18, а),а протекающие по ним переменные токи выпрямляются с помощью диодов. В остальной части схемы идентичны, обе они работают с магнитоэлектрическим логометром.
Другой вариант электрической схемы дистанционного манометра с индуктивным датчиком и ферродинамическим логометром показан на рис.18,б. Схема также питается от источника36 в 400 гц, но отличается от рассмотренной выше тем, что вкачестве указателя в ней используется ферродинамический логометр переменного тока. Конструкция датчика давления, используемого в схемах на рис.18,а и б, изображена на рис.12.

Рис.19. Компенсационная схема электрического дистанционного манометра
В рассмотренных на рис.17,6 и 18 схемах с логометрами величина измеряемого отношения токов i1/i2не зависит отрежимов питания, поскольку при изменении напряжения и частоты оба тока i1 и i2 изменяются в одинаковой степени.
Компенсационные схемы в большинстве своем являются самобалансирующимися мостовыми схемами, в одно или два .плеча которых включены переменные сопротивления, индуктивности или емкости, а напряжение, снимаемое с диагонали моста, подается через усилитель на малоинерционный электродвигатель, непрерывно поддерживающий мост в состоянии равновесия путем вращения через редуктор компенсирующего электрического преобразователя (потенциометрического, индуктивного, емкостного), также включенного в одно или два плеча моста. На рис.19 показан вариант компенсационной схемы с потенциометрическими преобразователями. Выходной величиной служит угловое перемещение вала двигателя или выходной оси редуктора, связанной с электрическим преобразователем. Характеристика компенсационной схемы вытекает из условия равновесия моста. Для самобалансирующейся мостовой схемы (см. рис.19) с потенциометром на входе и потенциометром на выходе условие равновесия
![]() ,
,
где RX сопротивление одного из плеч выходного потенциометра;
RП полное сопротивление входного потенциометра;
М максимальное значение угла .
Отсюда характеристика схемы
![]() .
.
Компенсационные схемы могут работать как на постоянном токе, так и на переменном. Применение переменного тока предпочтительнее по двум причинам: во-первых, усилители переменного тока не имеют дрейфа нуля, свойственного усилителям постоянного тока и, во-вторых, двигатели переменного тока проще и надежнее двигателей постоянного тока.
В результате сопоставления характеристик рассмотренных схем можно сделать некоторые выводы о рациональных областях их применения. В схемах с гальванометром (см. рис.17, а) сила тока зависит от напряжения источника питания. В логометрических и компенсационных схемах (см. рис.17, 6, 18 и 19) выходные величины i1/i2и не зависят от напряжения. Следовательно, при использовании датчиков с параметрическим выходом (R, L или С) целесообразно применять логометрические или компенсационные схемы, учитывая при этом, что компенсационные схемы дают более высокую точность, но более сложны, чем логометрические. Принципиально возможно и применение схемы с измерением силы тока, но при этом для исключенияпогрешностей, вызванных изменением напряжения источника питания, необходима точная стабилизация напряжения.