

Приложение 1. Темы курсового проекта
В таблице 1 приведён примерный перечень тем курсовых проектов по дисциплине: «Микропроцессорные системы управления технологическими процессами (МПСУ ТП)», «Микропроцессорные системы управления (МПСУ)» или «Микропроцессорные системы и управляющие комплексы (МПСУ и УК)». Перечень тем обычно утверждает заведующий кафедрой. При выполнении работы следует активно просматривать технические журналы, материалы конференций и выставок, книг, имеющихся в библиотеке института и библиотеках города Волжского и Волгограда, иногда что-то можно найти в интернете.
Ещё раз обращаем внимание, если студент выбрал тему не из таблицы заданий, но содержание работы всё равно должно отражать вариант студента по таблице заданий, т.е. должна быть реализована сигнализация, аналоговые контуры регулирования, дискретные системы управления (см. введение и раздел 6 «Структура работы»).
Если применяется комбинированный закон регулирования: по отклонению и по контролируемому возмущению, то следует обеспечить безударность, как по каналу отклонения, так и по каналу контролируемого возмущающего воздействия.
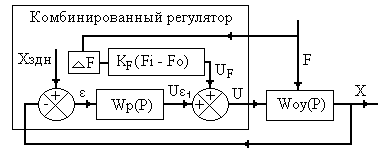
Рисунок 2 Структура комбинированного регулятора
F – зона нечувствительности по каналу возмущения,
КF – коэффициент компенсации возмущения F.
Базовое значение возмущения формируется в момент включения регулятора в автоматический режим. Выражение формируемого возмущения будет иметь вид КF*( Fi -F0), а не КF*F, как обычно приводят в литературе.
Fi – величина контролируемого возмущения. F0 – начальное значение контролируемого возмущения перед переключением в автоматический режим (базовое значение). В дистанционном или ручном режиме работы должен включаться режим слежения, при котором Хздн= Xi и F0=Fi. В контроллерах Ремикон Р-130 такой режим формирования задания регулятору назван статической балансировкой.
По каналу возмущения и по каналу отклонения устанавливается своя зона нечувствительности (X и F). Величина зоны нечувствительности зависит от погрешности измерительного канала и может быть оценена по формуле: X 3x; F 3F,
x - погрешность измерительного канала.
F - погрешность канала возмущения.
Обозначим величину рассогласования до зоны нечувствительности регулятора через , а после зоны нечувствительности через 1. Значение 1 поступает в регулятор. Если рассогласование меньше зоны нечувствительности X, то в регулятор поступает рассогласование 1, равное нулю. То есть, если i = Хздн – Хi X, то 1=0. Если i>X, то величина 1 следующим образом: 1= (i-X) sign(). Sign() – функция знака. Хi – значение регулируемой величины.
Следует обратить внимание на реализацию САР повышенной надёжности. Надёжность САР повышается за счёт введения трёх блоков: по каналу ввода задания, по каналу регулируемой переменной и по выходному каналу регулятора. Общая структура регулятора повышенной надёжности имеет вид:
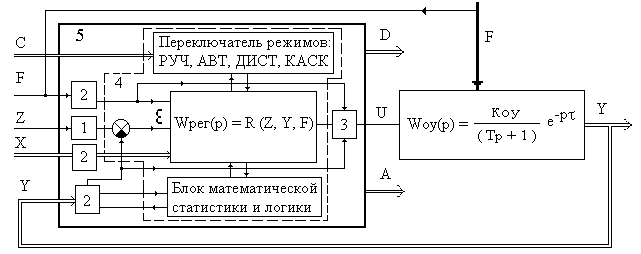
Рисунок 3 Структура регулятора повышенной надёжности
C – команды переключения режимов. X – настройки регулятора.
1 ‑ блок защиты от некорректного ввода информации.
2 ‑ блок проверки на достоверность входной информации.
3 ‑ блок контроля отработки управляющего воздействия.
4 – структура исходного регулятора.
5 ‑ регулятор с блоками контроля и защиты.
D – дискретные выходы регулятора (режимы: включен, отключен, режим работы). U – сигнал регулирования. A – сигнализация нарушений и аварийных ситуаций при регулировании. - двойной линией обозначается векторная величина.
Команды переключения режимов (С): РУЧ – ручной режим. ДИСТ – дистанционный режим регулирования. АВТ – автоматический режим регулирования. КАСК – каскадный режим регулирования.
F – контролируемые возмущения. X – настройки регулятора: постоянная времени экспоненциального фильтра, зона нечувствительности, ограничения сигнала регулирования по минимуму и максимуму (могут формироваться автоматически в процессе регулирования), коэффициенты.
Таблица 1
Примерный перечень тем
№ п/п |
Наименование работы Литературные источники |
Требования, краткое содержание работы |
Ф.И.О. |
|
|
Системы автоматизированного контроля влажности в АСУ ТП Лекции Севастьянова Б.Г. и др., информация из книг, интернета (www.owen.ru и др.), Редитор Р-130, журналы: СТА, ПиСУ, Автоматизация и производство |
Обзор технологических процессов, где необходим контроль влажности. Понятие влажности, методы контроля. Как по косвенным параметрам оценивается влажность газа (воздуха), сыпучих материалов, древесины. Систематизировать и привести перечень датчиков с техническими характеристи-ками и адресом изготовителя. Схемы подключения к контроллерам, обозначение на технологических схемах, схемы регулирования. Оценка погрешности измерительного канала с учётом разряд-ности АЦП. Для реализации системы регулирования влажности можно использовать регуляторы 2ТРМ1 или УТ24 или другие, например, ADAM. Алгоритмы и программы регулирования влажности. |
|
|
|
Организация связи АРМ на базе Trace Mode или Круг-2000 с локальной сетью контроллеров Р-130 или Decont-182, или с ПЛК-150, ПЛК-154 |
Написание программы или использование готовых драйверов связи с контроллерами. Должна быть разработана и представлена работающая САР. Задания для реализации– из таблицы заданий. |
|
Продолжение таблицы 1
|
Разработка автоматизированной системы пуска и останова группы центробежных насосов на базе Р-130. Лекции Севастьянова Б.Г. и др., информация из книг, интернета. Компания Ахта и др. Несколько книг имеется в читальном зале ВПИ (корпус А) |
Постановка задачи. Анализ существующих схем управления центробежными насосами. Существующие электрические схемы управления. Классический синтез: словесное описание, формализация, минимизация, получение структурной схемы, коррекция (дополнение) схемы с учётом реальных особенностей эксплуатации. При разработке алгоритма пуска и останова группы центробежных насосов следует учитывать энергосберегающие технологии: частотное регулирование, применение «мягких» пускателей. Должны быть представлены схемы подключения контроллеров к датчикам и ИМ |
|
|
|
Реализация релейных регуляторов на контроллерах фирм «Овен» или «КонтрАвт». (contravt-volga@vlink.ru 400112, Волгоград а.я 602, Бондаренко А.А. 8442-сот. 902 314-83-62). www. contravt.ru, E-mail: sales@contravt.ru |
Систематизация информации. Привести схемы подключения аналоговых и дискрет-ных сигналов (входных и выходных) и фрагменты проектных решений. Расчёт и программирование простейших алгоритмов, стандартного закона регулирования, релей-ного регулятора. Реализовать имитатор аналоговых и дискретных сигналов. Все остальные части КП должны быть в соот-ветствии с требованиями к КП (схемы подключения и т.д.) |
|
Примечание. В таблице 1 приведено несколько тем в качестве образца.