

13. Таймер/счётчик 2. Режимы работы.
Начиная с i8052.
16-разрядный.
Режимы:
- захвата событий;
- автозагрузки;
- использование как генератора для последовательного ввода/вывода;
- генератора тактовых сигналов.
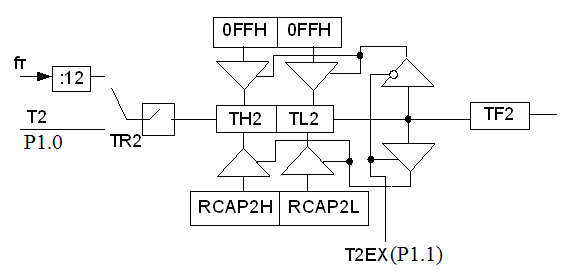
Режим захвата событий.

Режим может быть таймера или счетчика (от внешнего тактового генератора). У порта Р1 некоторые биты переопределены (раньше у порта Р3).
TF2 может быть обработан по прерыванию.
![]() -
детектор событий, определяет перепад
от 1 к 0.
-
детектор событий, определяет перепад
от 1 к 0.
RCAP2H и L – регистры захвата старшего и младшего байтов.
При захвате события текущее значение регистров ТН, ТL перепишется в регистр захвата. Во время дальнейшего счета содержимое RCAP2 надо быстро переписать в память. При поступлении нового события содержимое регистров TH, TL перепишется в регистр захвата.
EXEN2 – разрешает режим работы захвата.
EXF2 – обработчик прерывания по самому событию.
Нужны доп. регистры спец. функций: T2CON, T2COM, TH2, TL2, RCAP2H, RCAP2L.
Перезапускаемый режим.
1. Традиционный – накапливающий таймер/счетчик: RCAP2 используется для записи начального значения, с которого начинается счет.
2. Вычитающий: работает верхний вентиль, загружается 0FFh, вычитается до значения из RCAP2.
Как генератор послед. ввода/вывода.
1. Диапазон скоростей 9600 (?).
2. Могут быть использованы режимы таймера 1. Либо счет идет от таймера 1, либо от таймера 2.
Использование как генератора тактовых импульсов.

14. Организация прерываний в омэвм51.
Cуществует 5 уровней прерываний;
3 внутренних (2 таймера T0,T1;UART)
2 внешних (INT0, INT1)

Для настройки прерываний исп. регистр:
Регистр управления:

При переполнении биты TF равны 1. Их можно опросить программным способом. Чтобы разрешать или запрещать прерывания нужен регистр IE.
Разряды IE1(0) регистра TCON служат для запоминания прерываний от внешних сигналов. Биты IT1(0) – в них указывается управление внешними прерываниями. Если IТ=1, то обработка идет по спадающему фронту, если 0, то по уровню.
Регистр разрешения прерываний (побитно доступен) IE:

Регистр приоритетов прерываний IP:

Если все нули, то приоритет выставляется по стрелке. Если 1, то там наивысший приоритет. При включении IE и IP выставляются в 0.
0ой бит IP – внеш. 0, 1ый – Т0, 2ой – внеш. 1, 3ий – Т1, 4ый – послед.
Назначение разрядов IE:
EA- Запретить все прерывания (ставим 0);
4. ES- разрешения прерываний от UART;
ET1- разрешения прерываний по переполнению таймера 1;
EX1 – разрешения прерываний для внешнего прерывания INT1;
ET0- разрешения прерываний по переполнению таймера 0;
0. EX0 – разрешения прерываний для внешнего прерывания INT0.
Обработка внутренних прерываний
При переполнения таймера возникает сигнал переполнения TF1,TF0. Если переполнения от таймеров разрешены, наступает обработка. При этом 1-ая команда обработчика от таймеров сбрасывает биты TF.
Формат регистра SCON (используется для обработки прерываний от последовательного ввода/вывода):
![]()
Для UART исп. биты RI,TI (от RECEIVE , TRANSMIT). Поднимаются при приеме/передача байта. Сброс осуществляет программист.
Биты запросов прерываний от внешних источников сбрасываются автоматически, если обработка идет по срезу, по уровню - надо сбрасывать программно.
За каждым прерыванием закрепляется вектор.
Внешний 0 (INT0) – 0003h
Внутренний 0 (T0) – 000Bh
Внешний 1 (INT1) – 0013h
Внутренний 1 (T1) – 001Bh
Внутренний (последоват.) – 0023h
На обработчик отводим 8 байт – явно мало, поэтому надо перейти на свой обработчик. Для перехода на обработчик используется jmp, call.
JMP:
Org 0003h jmp prog1
Prog1:
…
Reti
CALL:
Org 0003h call prog1
Reti
Prog1:
…
ret
После того, как пришел сигнал прерывания, пройдет время до завершения текущей команды + время на переход к обработчику. Наличие прерывания определяется в конце МЦ, не позже чем за 2 такта.
Итого: Через 38 тактов выполним 1-ую команду обработчика (если команда 2-х байтная. Проверка наличия прерывания происходит в середине команды.
2+24+12=38 – это лучший результат.
Худший результат 2+12+24+48=86, если команда более длинная (MUL,DIV)
Расширение внешних источников прерываний
Если внешних прерываний более 2-х, то :
1)
Это монтажное ИЛИ. Номер источника определяется программным способом. Приоритеты устанавливает пользователь. После обработки прерывания нужно сделать программный сброс битов.
Если остался свободный внутренний таймер, то его надо настроить в режим счетчика и загрузить начальное значение либо FF, либо FFFF.
Пример программы для обработки бита TF по прерыванию.
MOV TMOD, #01h
MOV TH0, #high(65536-50000)
MOV TL0, #low(65536-50000)
MOV IE, #10000010B
SETB TR0 ;запуск таймера
JMP $
000Bh: Call clock
Reti
Clock: Mov TH0,#
Mov TL0, #
….
RET