

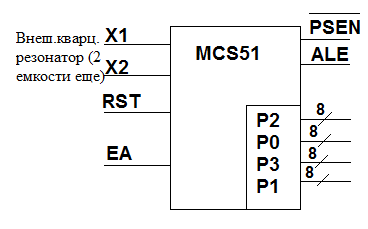
5. Порты микро-эвм семейства mcs51 (к1816ве51). Назначение портов. Функциональная схема порта р0. Узел управления и синхронизации
В данный узел входит внутренний генератор, регистр команд и устройство управления.

Используемые сигналы:
EA – включение либо исключение использования внутренней памяти программ (низк.уровень, если отсутствует внутр.память программ);
RST – сброс (установка ОМЭВМ в исходное состояние);
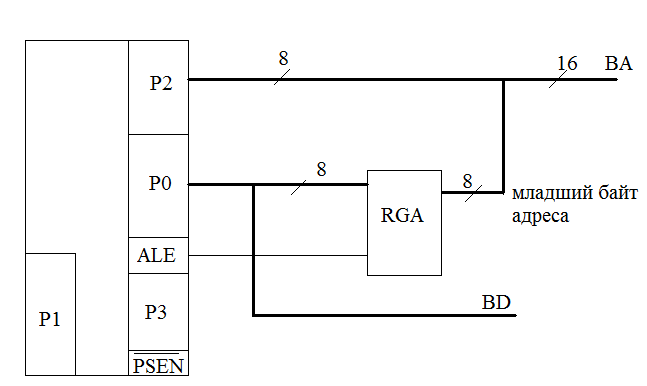
ALE – стробирование адреса (при использовании внешней памяти) – разрешение младшего байта;
![]() – обращение
к памяти программ (разрешение внешней
памяти программ).
– обращение
к памяти программ (разрешение внешней
памяти программ).
Узел сопряжения с внешними устройствами
Данный узел содержит четыре 8-разрядных порта.
Порт P0.
Двунаправленный порт P0 может служить для передачи информации по шине данных. Также через него предается младший байт 16-разрядного адреса. Разделение данных и адреса производится по времени с помощью сигнала ALE.
Это один разряд порта Р0 из 8 штук. Совокупность 8ми триггеров – регистр-защелка (регистр порта).
Порт состоит из следующих частей:
Внутренний фиксатор (триггер типа «защелка»);
Два буфера;
Мультиплексор MUX;
Два выходных транзистора;
1. Работа с внешней памятью (выдаются адрес или данные).
T1 – открыт, T2 – закрыт высокий уровень;
T1 – закрыт, T2 – открыт низкий уровень;
Адрес или данные сопровождаются управляющим сигналом (Сad), который подается на элемент «И» и подключает вход адрес/данные мультиплексора к затвору транзистора T2.
2. Чтение из внешней памяти (ввод). На внешней шине z-состояние.
T1 – закрыт, T2 – закрыт. На внутренней шине MD необходимо обеспечить высокий уровень, чтобы Т2 был закрыт. Чтобы считать с внешней шины сигнал, нужен сигнал Cin.
3. Обычный вывод. Cигнал на выходе транзистора T2 полностью определяется состоянием фиксатора. Ввод данных в этом случае возможен только при закрытом транзисторе T2 и осуществляется с помощью управляющего сигнала Сw. Единица на выходе обеспечивается с помощью подтягивающих резисторов на выходе.
Состояние фиксатора может быть опрошено сигналом Cf.
Порты P1, P2, P3 (квазидвунаправленные).
Порт P1 применяется как обычный порт ввода/вывода.
Порт P2 применяется для вывода старшего байта адреса.
Порт P3 – многофункциональный.
P3.0 – последовательный ввод (приемник)
P3.1 – последовательный вывод (передатчик)
P3.2 – вход внешнего прерывания от источника 0
P3.3 – вход внешнего прерывания от источника 1
P3.4 – вход таймера/счетчика 0
P3.5 – вход таймера/счетчика 1
P3.6 – выход сигнала записи данных во внешнее ЗУ данных
P3.7 – выход сигнала чтения данных из внешнего ЗУ данных
6. Способы адресации микро-эвм семейства mcs51 (к1816ве51).
Все команды могут быть разделены на четыре группы:
Команды передачи данных
Команды обработки данных
Команды управления
Команды для выполнения операций с отдельными битами
Cпособы адресации
Существуют следующие способы адресации операндов-источников:
Регистровая адресация:
MOV A, Rr – пересылка операнда из РОН Rr в аккумулятор;
MOV Rr, A – пересылка из аккумулятора в РОН;
Прямая адресация:
MOV ad, Rr – пересылка операнда из регистра Rr в ячейку внутренней памяти ОЗУ, адрес которой прямо указан в команде;
MOV Rr, ad – пересылка из памяти в РОН.
Вместо Rr может быть использован аккумулятор ACC:
MOV ad, A;
MOV A, ad.
Может быть использована команда для пересылки содержимого одной ячейки внутренней памяти ОЗУ в другую ячейку памяти:
MOV ad, ad.
Косвенная адресация:
Для обозначения косвенной адресации используется знак @.
MOV A, @R0 или MOV A, @R1 – пересылка в аккумулятор содержимого ячейки внутренней памяти, адрес которой указан в регистре R0 или R1;
MOV @R0, A или MOV @R1, A – пересылка содержимого аккумулятора в ячейку памяти внутреннего ОЗУ, адрес которой указан в регистре R0 или R1.
К этому же типу команд относятся команды:
MOV ad, @R0 ; MOV ad, @R1 ; MOV @R0, ad ; MOV @R1, ad
Непосредственная адресация
Для обозначения непосредственной адресации используется знак #:
MOV A,#data.